Configurer la communication de l’interface standard avec Kawasaki
Ce guide explique comment charger les fichiers du programme d’interface standard sur un robot Kawasaki, et configurer la communication par interface standard entre le système de vision Mech-Mind et le robot.
| Dans cette section, vous chargerez le programme d’interface standard du robot et les fichiers de configuration sur le système du robot afin d’établir la communication par interface standard entre le système de vision et le robot. |
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
-
Contrôleur : série E ou série F
-
Version du logiciel système du contrôleur : aucune exigence
-
Options logicielles supplémentaires du contrôleur : aucune exigence
Configurer la connexion réseau
Connecter le matériel
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port réseau du contrôleur du robot.
|

Définir les adresses IP
-
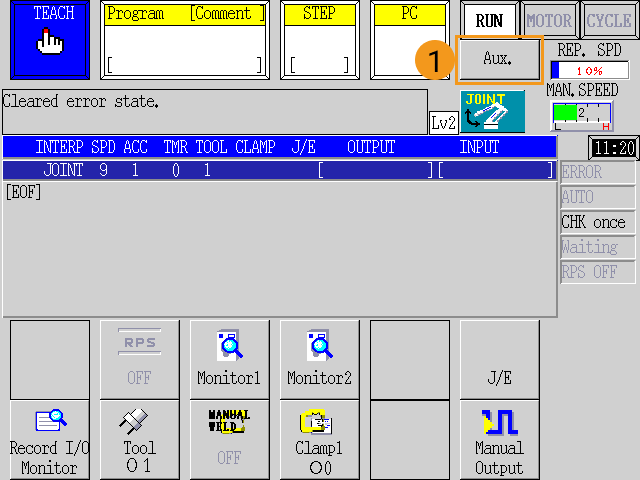
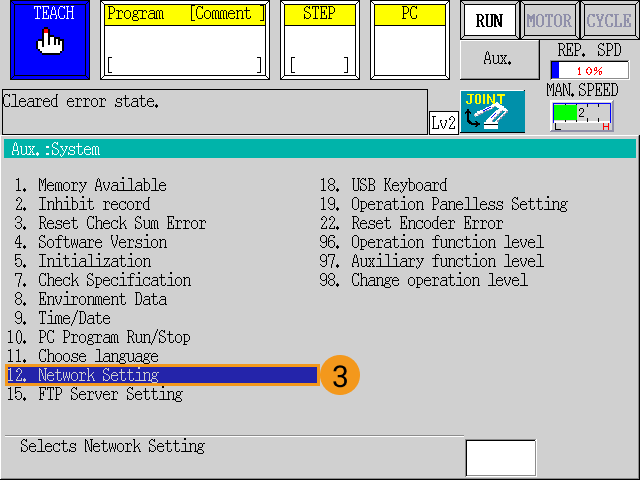
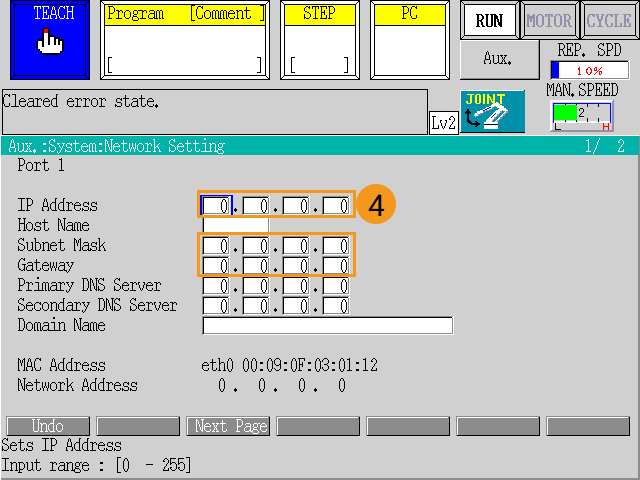
Appuyez sur le bouton Aux. sur le boîtier de programmation, puis sélectionnez pour définir l’adresse IP du port Ethernet du robot.
-
Effectuez les opérations correspondantes en fonction du port auquel le câble Ethernet est connecté.
-
Si le câble Ethernet est connecté au port 1, configurez l’adresse IP et le masque de sous-réseau pour le port 1 sur la page Paramétrage réseau du port 1. L’adresse IP du robot doit être dans le même sous-réseau que l’adresse IP de l’IPC. Si une passerelle réseau est utilisée, définissez le paramètre Passerelle.
-
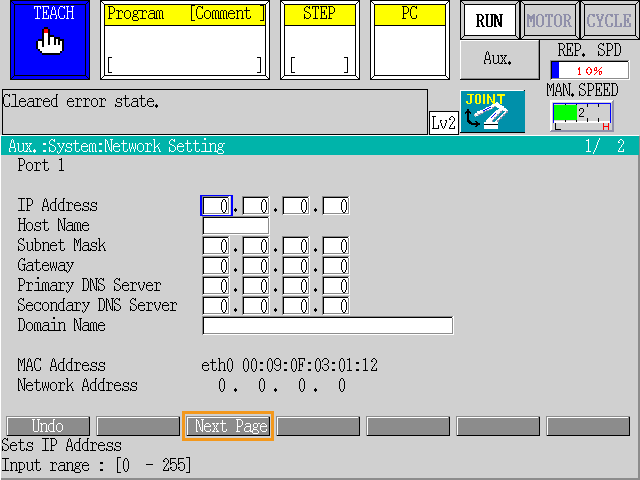
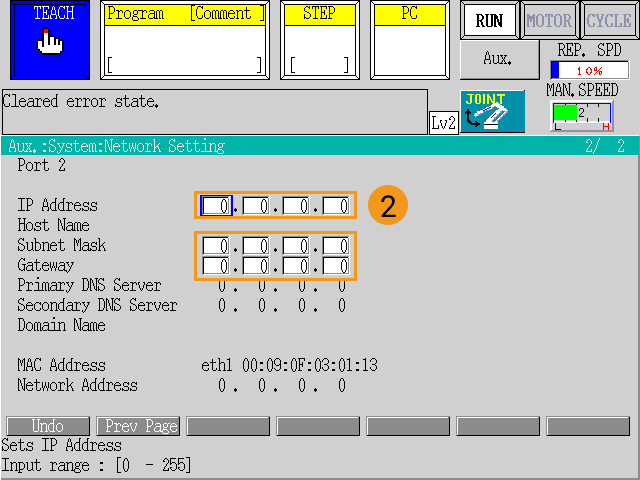
Si le câble Ethernet est connecté au port 2, cliquez sur Page suivante en bas de la page Paramétrage réseau du port 1 pour passer à la page Paramétrage réseau du port 2, puis configurez l’adresse IP et le masque de sous-réseau pour le port 2. L’adresse IP du robot doit être dans le même sous-réseau que l’adresse IP de l’IPC. Si une passerelle réseau est utilisée, définissez le paramètre Passerelle.
-
-
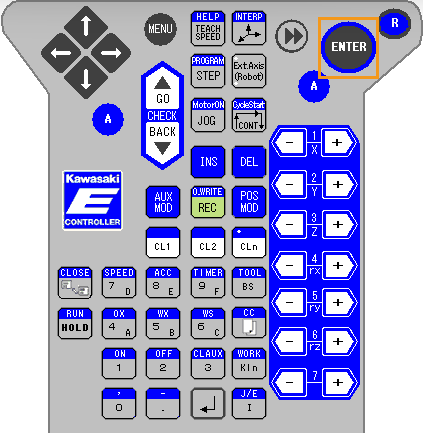
Après avoir défini l’adresse IP, appuyez sur la touche ENTRÉE sur le boîtier de programmation pour confirmer.
-
Redémarrez le contrôleur.
-
Dans l’IPC, configurer l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, les adresses IP de l’IPC et du contrôleur du robot doivent se trouver dans le même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 se trouvent dans le même sous-réseau.
Configurer la communication avec le robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
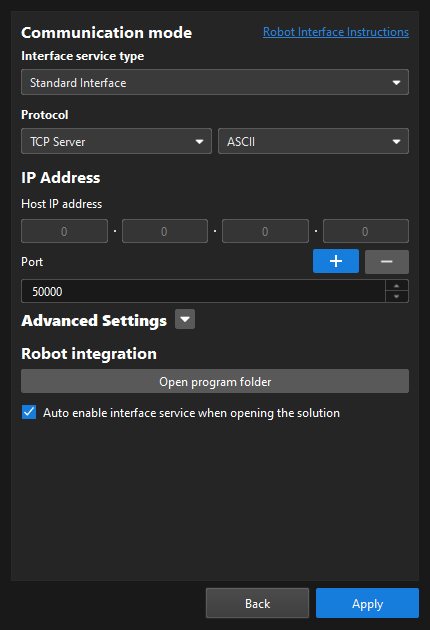
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
-
Si vous souhaitez charger manuellement des fichiers de programme, vous devez effectuer cette étape. Sinon, ignorez cette étape.
-
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme sur le robot (Auto)
Vous pouvez suivre les instructions ci-dessous pour permettre le chargement automatique des programmes d’interface standard ou des programmes d’exemple d’interface standard sur le robot. Dans cet exemple, les programmes d’interface standard sont chargés automatiquement en effectuant les étapes suivantes. Les étapes pour charger automatiquement les programmes d’exemple d’interface standard sont similaires.
| Si le processus de chargement automatique échoue et que vous ne pouvez pas résoudre le problème, passez à Charger les fichiers du programme sur le robot (Manuel). |
-
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, allez dans le dossier Robot Program Loader en utilisant le chemin
Communication Component\tool\Robot Program Loader, puis double-cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur apparaît.Pour changer de langue dans le chargeur, sélectionnez une langue différente dans la liste déroulante en haut à droite et redémarrez le chargeur pour que la nouvelle langue prenne effet. -
Sur l’interface principale, sélectionnez la marque de robot KAWASAKI, saisissez l’adresse IP réelle du robot, puis cliquez sur Se connecter.
Si la connexion échoue, cliquez sur Tester la connexion réseau dans le coin inférieur droit pour diagnostiquer le problème. 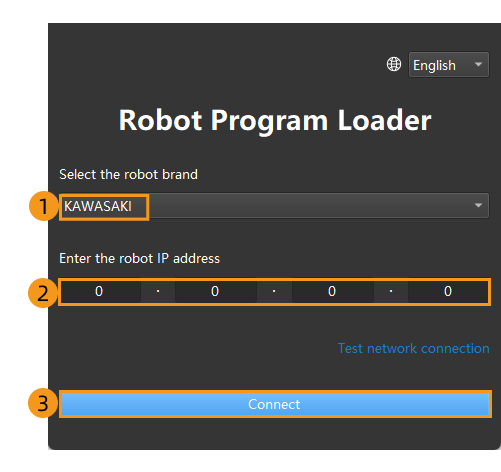
-
Dans l’interface de chargement de programme KAWASAKI, cliquez sur l’icône de dossier, sélectionnez le chemin des fichiers de sauvegarde, puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi s’affiche dans la section Journal.
Si des erreurs surviennent lors du processus de chargement ultérieur, les fichiers peuvent être utilisés pour réinitialiser le système du robot. 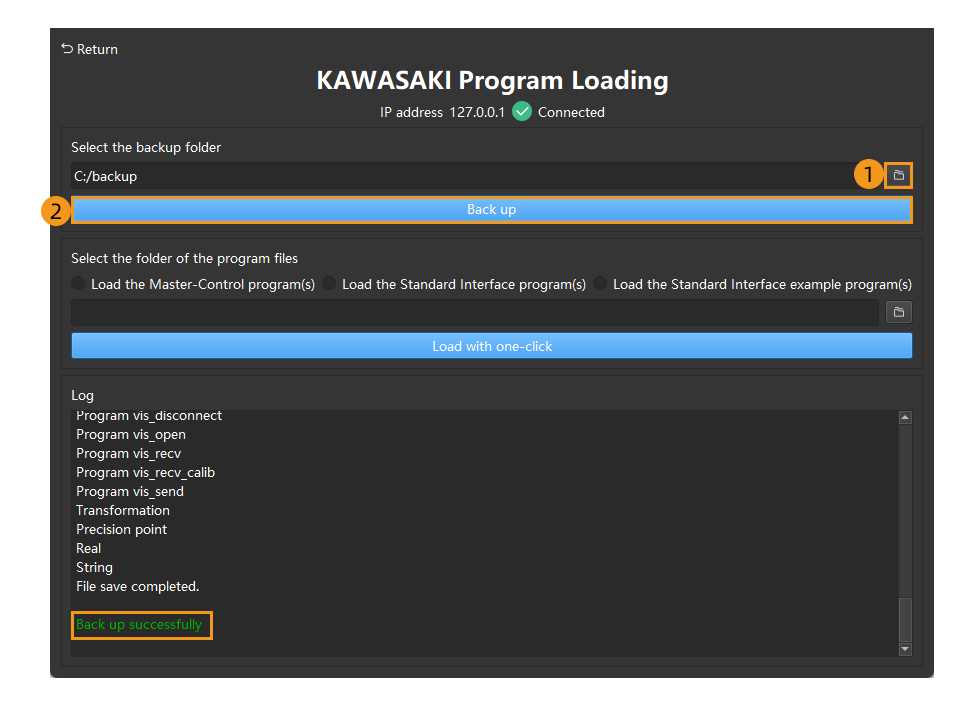
-
Sélectionnez Charger le(s) programme(s) de commande principale puis cliquez sur Charger en un clic. Si les fichiers sont chargés sur le robot, un message indiquant que les fichiers du programme ont été chargés avec succès apparaît dans la section Journal.
Si vous souhaitez charger des programmes d’exemple d’interface standard, sélectionnez Charger le(s) programme(s) d’exemple d’interface standard puis cliquez sur Charger en un clic. 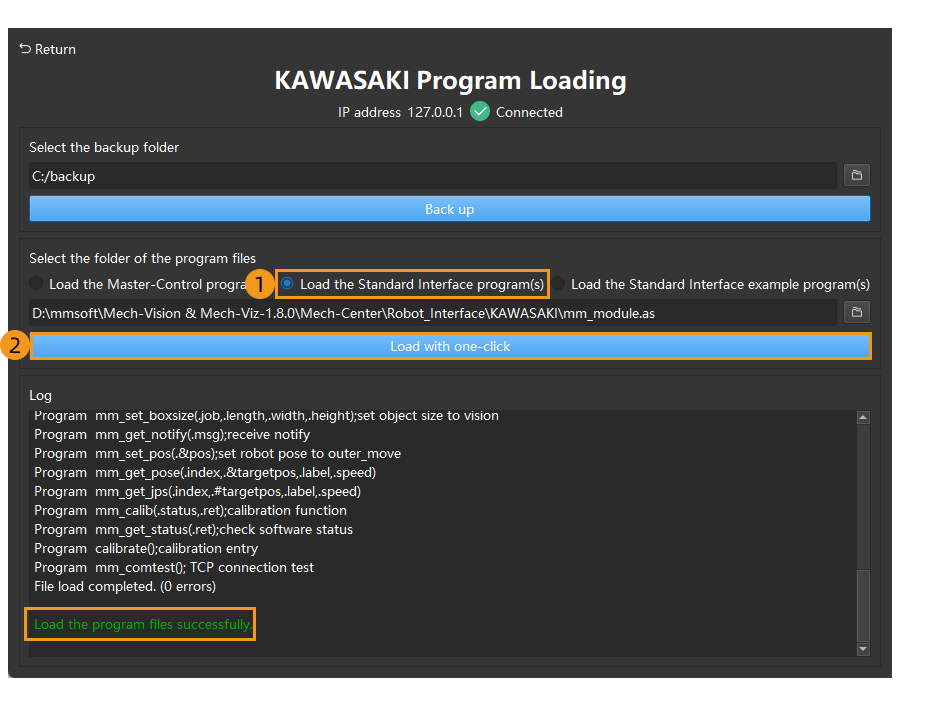
Après avoir terminé les opérations ci-dessus, passez à Tester la communication de l’interface standard.
Charger les fichiers du programme sur le robot (Manuel)
| Si vous avez effectué les opérations dans Charger les fichiers du programme sur le robot (Auto), passez cette section. |
Préparer les fichiers
-
Branchez la clé USB sur le port USB de l’IPC.
-
Sur l’IPC, copiez le fichier mm_module.as depuis le dossier de programme ouvert (le dossier
KAWASAKI) vers le répertoire racine de la clé USB, puis débranchez la clé USB.Vous pouvez également trouver le dossier de programme dans le chemin
Communication Component/Robot_Interface/KAWASAKIdu répertoire d’installation de Mech-Vision et Mech-Viz.
Précautions pour le chargement des fichiers
-
Sauvegardez les programmes utilisateur.
Si des programmes utilisateur existent dans la liste des programmes sur le boîtier de programmation, sauvegardez-les avant de charger les fichiers du programme. S’il n’existe aucun programme utilisateur sur le boîtier de programmation, passez cette étape. Cliquez ici pour les instructions
-
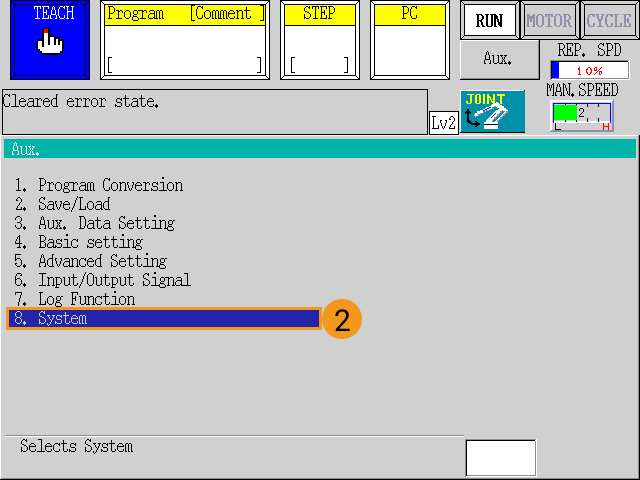
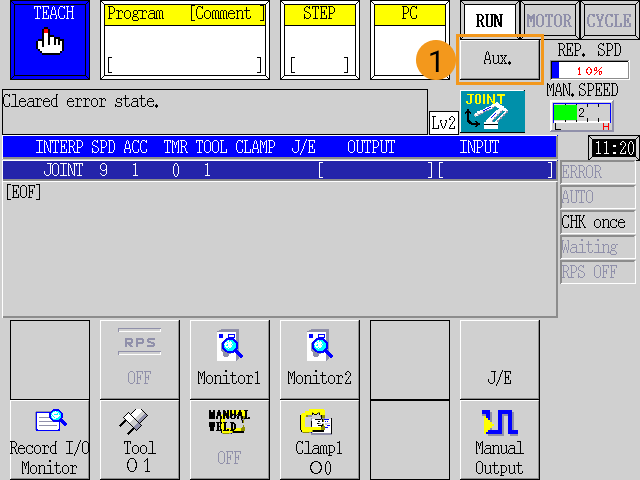
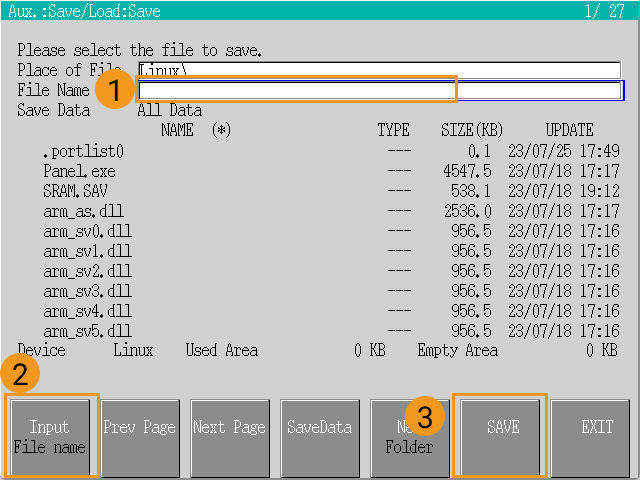
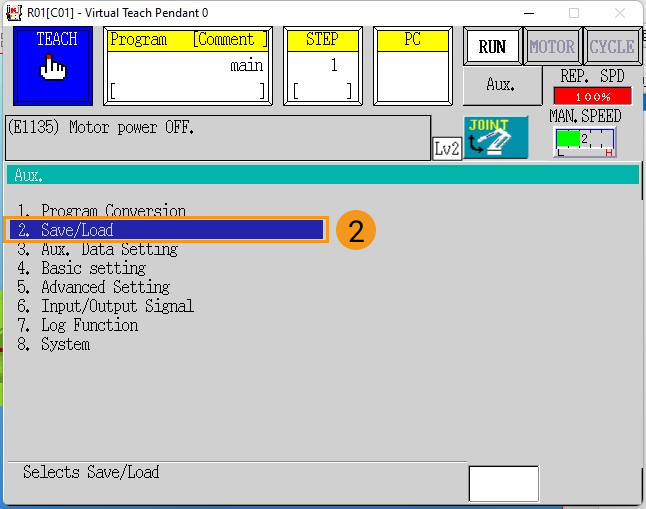
Appuyez sur le bouton Aux., et sélectionnez
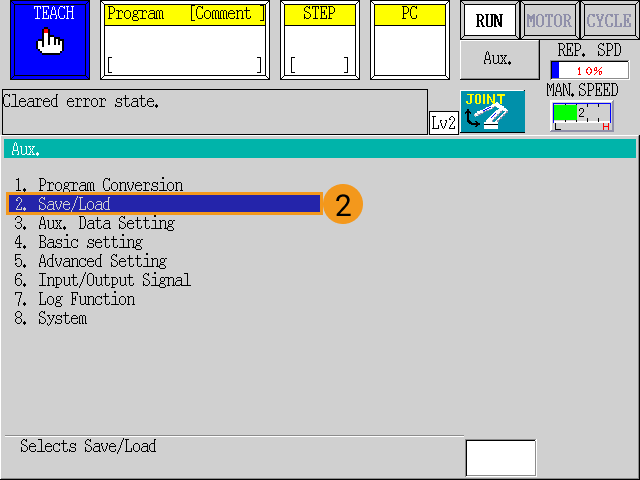
-
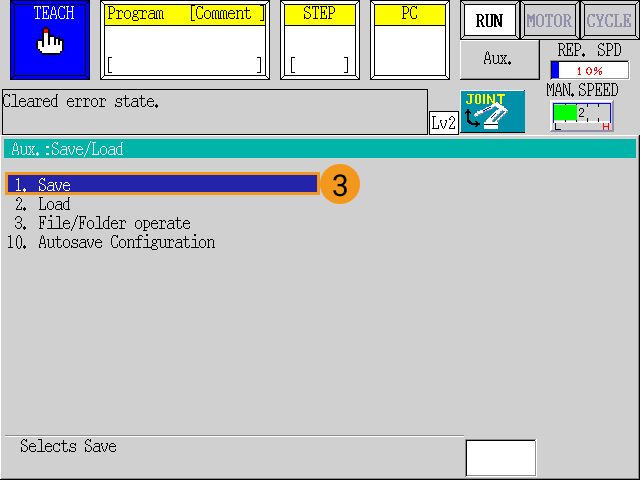
Sur la page Sauvegarder, appuyez sur Saisir le nom de fichier pour entrer le nom de fichier, puis appuyez sur le bouton Enregistrer. Après l’enregistrement du fichier, appuyez sur la touche R sur le boîtier de programmation pour revenir à la page principale.
-
-
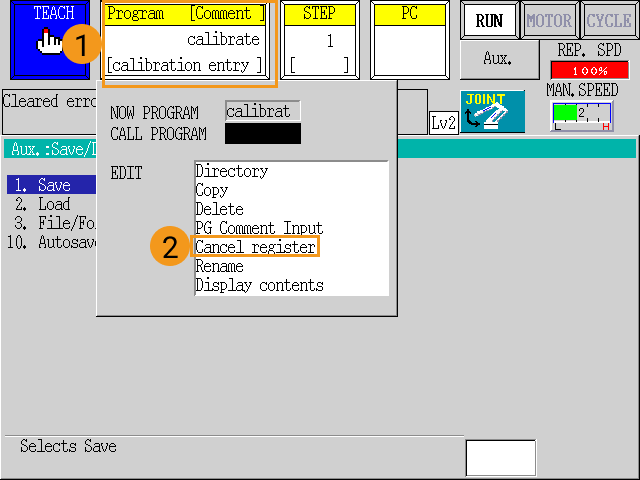
Avant de charger des fichiers, vérifiez s’il existe des programmes enregistrés dans la zone Programme sur le boîtier de programmation. Le cas échéant, désenregistrez ces programmes en suivant les instructions ci-dessous.
-
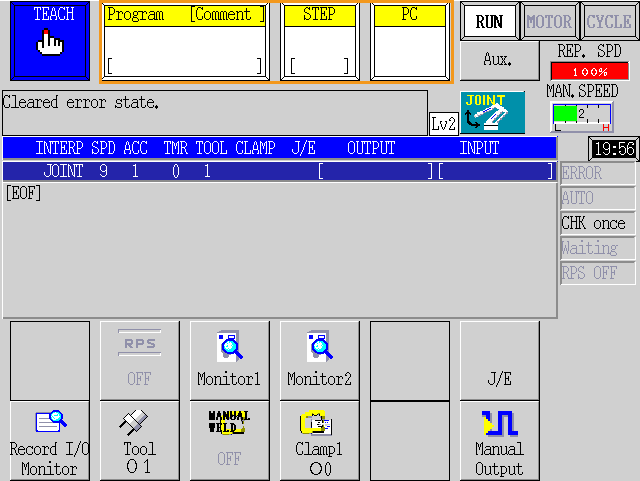
Avant de charger des fichiers, vérifiez que le robot est en mode enseignement. Après les vérifications ci-dessus, l’interface du boîtier de programmation s’affiche comme ci-dessous.
Charger les fichiers du programme sur le robot
-
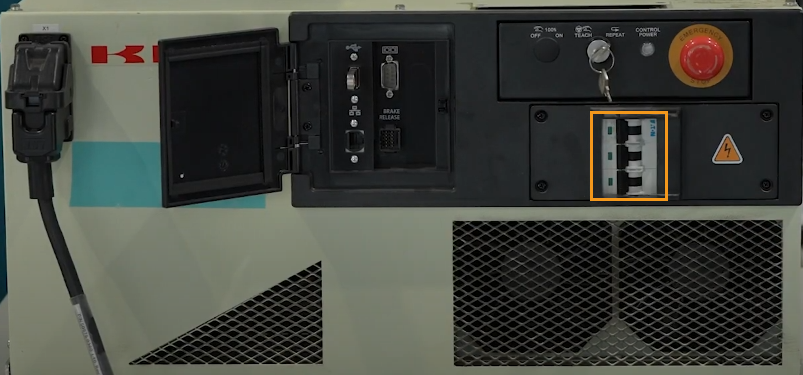
Branchez la clé USB sur le port USB du panneau du contrôleur.
-
Appuyez sur le bouton Aux. sur le boîtier de programmation.
-
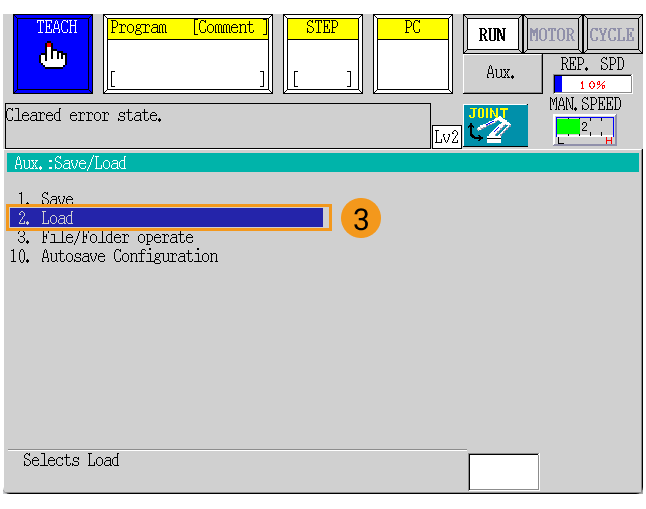
Sélectionnez .
-
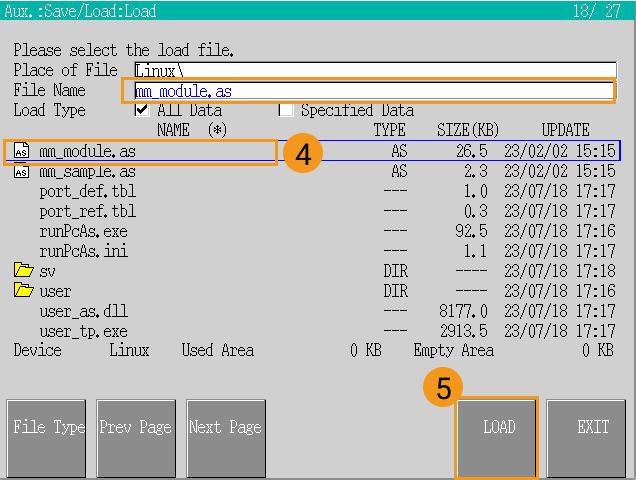
Double-cliquez sur le fichier de programme mm_module.as pour que mm_module.as s’affiche dans le champ Nom du fichier. Ensuite, sélectionnez CHARGER.
-
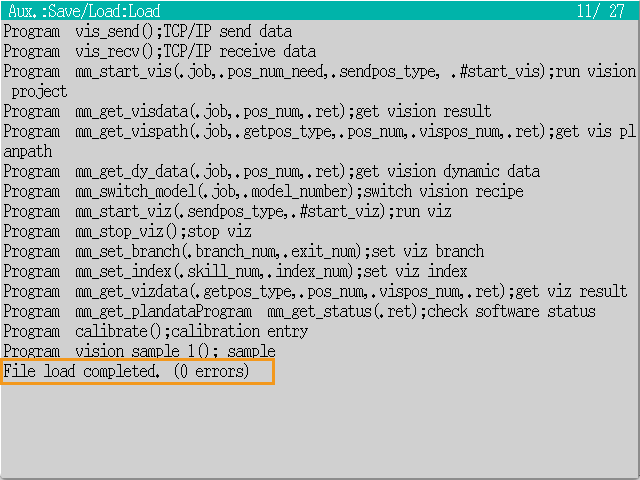
Après avoir chargé les fichiers, vérifiez qu’aucune erreur ne s’est produite durant le processus de chargement. Appuyez sur la touche R sur le boîtier de programmation pour quitter.
Tester la communication de l’interface standard
Sélectionner et modifier le programme utilisé pour le test de communication
-
Sélectionnez la zone Programme en mode enseignement. Sélectionnez Répertoire dans le menu contextuel.
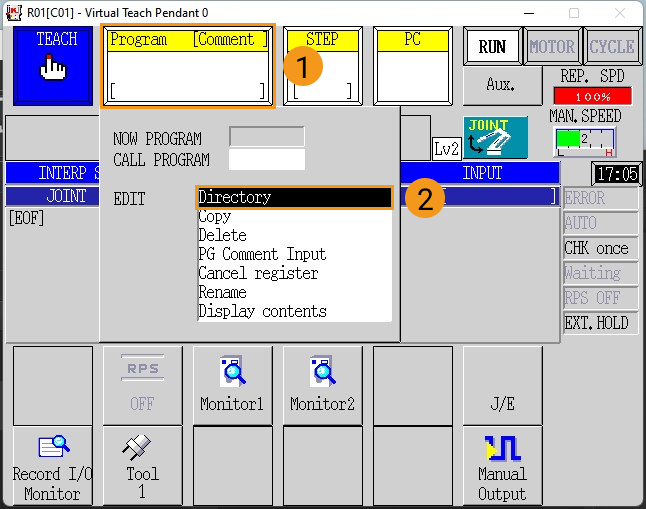
-
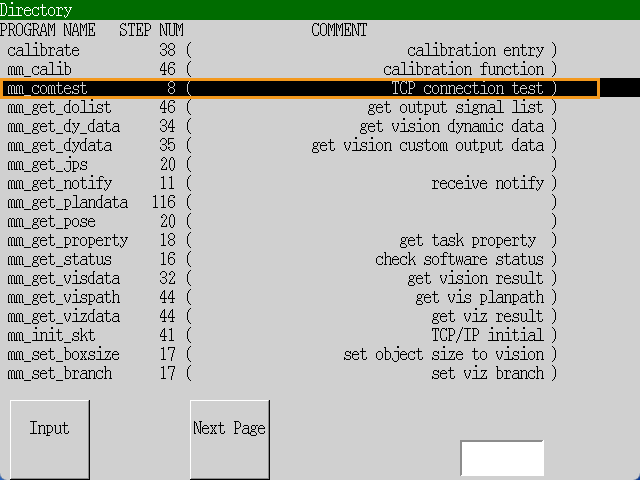
Sélectionnez le programme de premier plan mm_comtest dans la liste Répertoire. Ensuite, appuyez sur la touche ENTRÉE sur le boîtier de programmation pour confirmer la sélection.
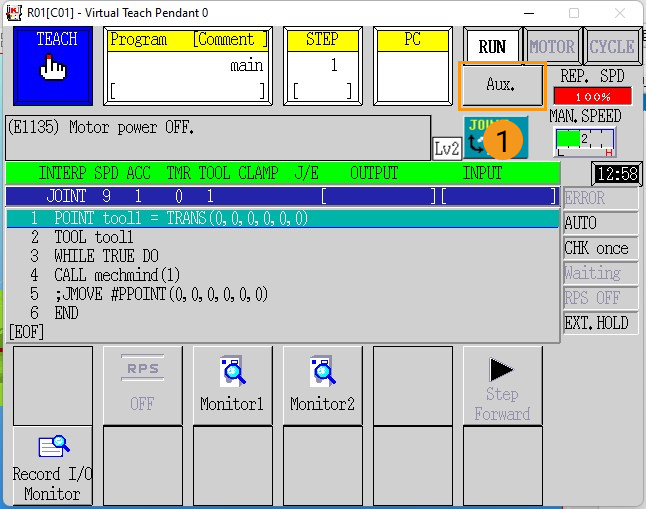
La figure suivante montre l’interface après l’ajout du programme.
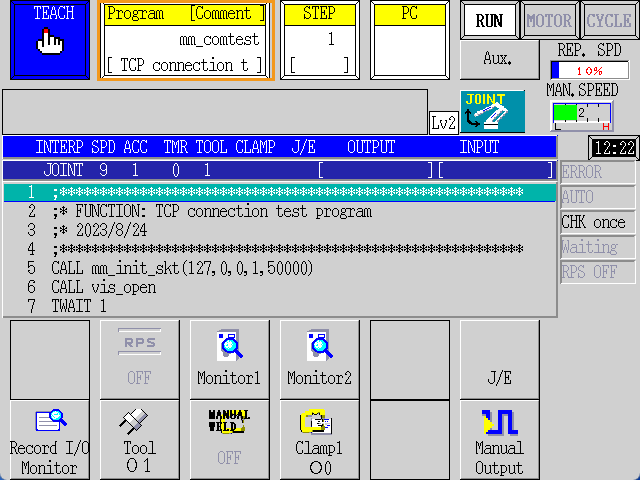
-
Réinitialisez les paramètres de la fonction mm_init_skt dans le programme mm_comtest en procédant comme suit.
-
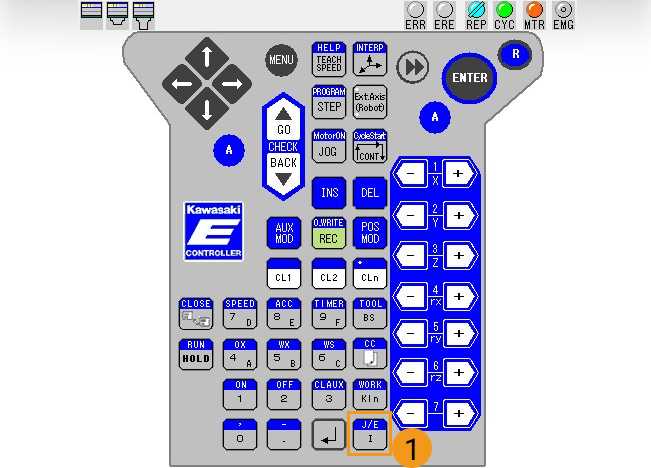
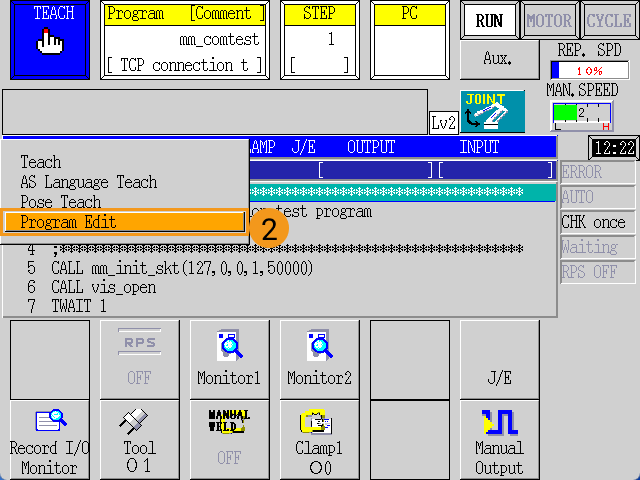
Appuyez sur J/E sur le boîtier de programmation, sélectionnez Édition de programme dans le menu contextuel, puis appuyez sur ENTRÉE pour confirmer.
-
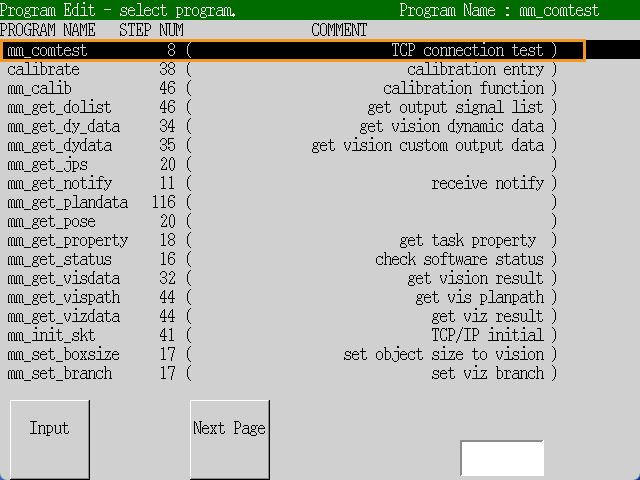
Sélectionnez mm_comtest dans le menu de programme et appuyez sur la touche ENTRÉE pour confirmer.
-
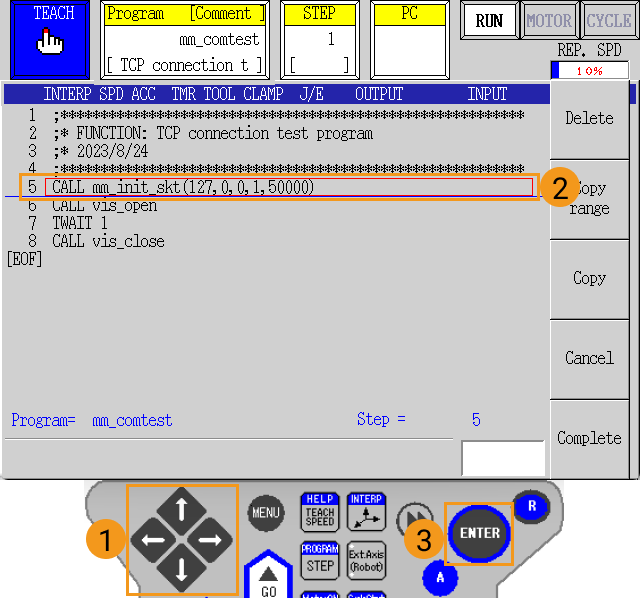
À l’aide des touches fléchées, déplacez le cadre de sélection rouge sur la ligne contenant mm_init_skt sur le boîtier de programmation pour sélectionner call mm_init_skt(127,0,0,1,50000). Ensuite, appuyez sur la touche ENTRÉE pour confirmer.
-
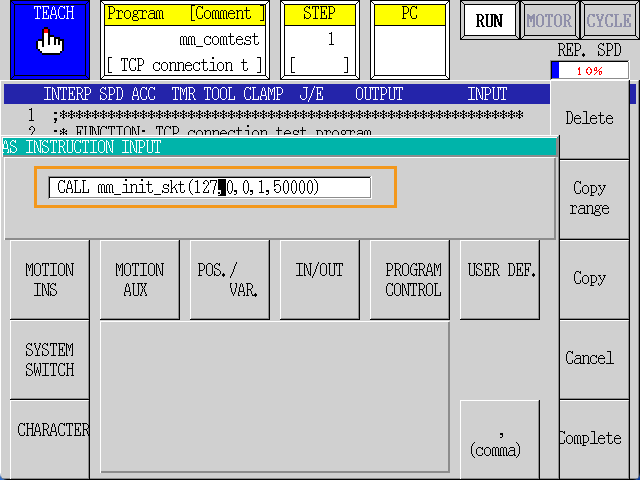
Utilisez les touches fléchées et les touches numériques sur le boîtier de programmation pour remplacer 127,0,0,1 par l’adresse IP de l’IPC et « 50000 » par le numéro de port hôte défini dans Mech-Vision. Après modification des paramètres, appuyez sur ENTRÉE pour confirmer et sur R pour quitter.
-
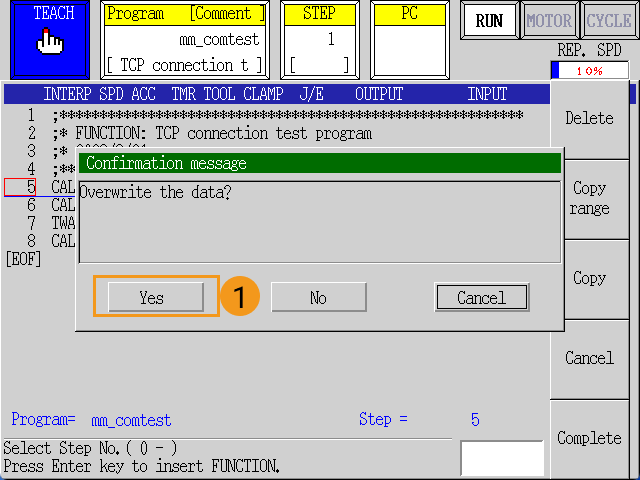
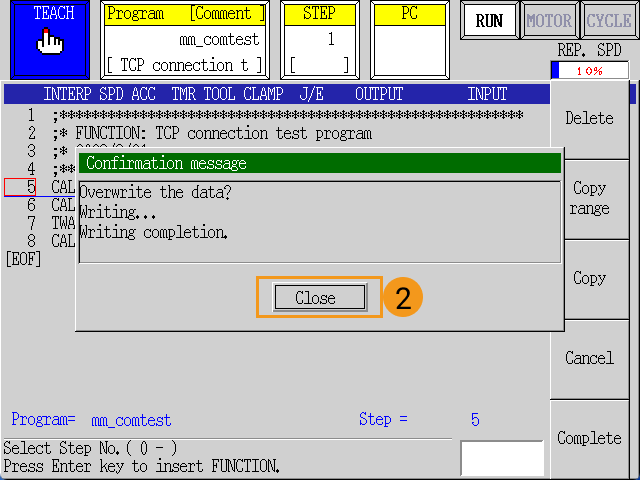
Dans la fenêtre de confirmation affichée, appuyez sur Oui puis sur Fermer.
-
Exécuter le programme et tester la connexion
-
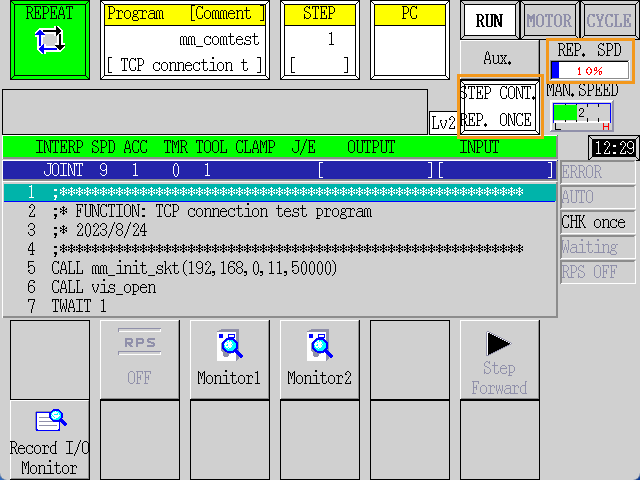
Basculez Teach/Repeat sur le contrôleur sur REPEAT et mettez le verrou d’enseignement sur le boîtier de programmation sur OFF. Après ces opérations, le robot doit être en mode REPEAT.

-
Passez en mode STEP CONT. REP. ONCE à l’écran, et réglez REP. SPD sur 10%.
-
Maintenez la touche A sur le clavier et appuyez sur MOTEUR à l’écran pour que MOTEUR s’allume. Maintenez A sur le clavier et appuyez sur CYCLE à l’écran pour que CYCLE s’allume. Si MARCHE ne devient pas vert, maintenez la touche A et appuyez sur la touche MARCHE/PAUSE sur le boîtier de programmation.
Lorsque MARCHE, MOTEUR, CYCLE sont tous allumés, le programme de test de communication commence à s’exécuter. 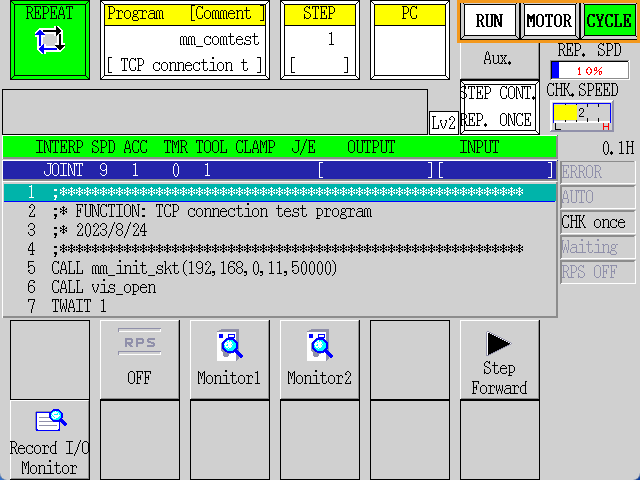
-
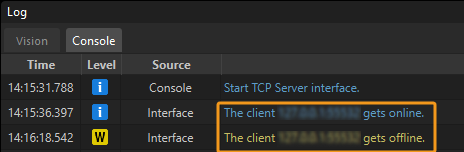
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.