Configurer la communication de l’interface standard avec FANUC CRX
Le plugin CRX fournit des services de communication par sockets basés sur TCP/IP pour communiquer avec le système de vision installé sur l’IPC. Si l’environnement réseau et les adresses IP des deux côtés restent inchangés, vous n’avez besoin de configurer les paramètres de communication qu’une seule fois.
| Vous devez reconfigurer les paramètres de communication si le plugin est réinstallé. |
Avant d’établir la communication avec le système de vision, veuillez vous assurer que les exigences suivantes ont été satisfaites.
-
Le plugin CRX est installé avec succès.
-
Le contrôleur du robot est connecté à l’IPC via Ethernet (un routeur peut être utilisé ici).
Configuration de la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
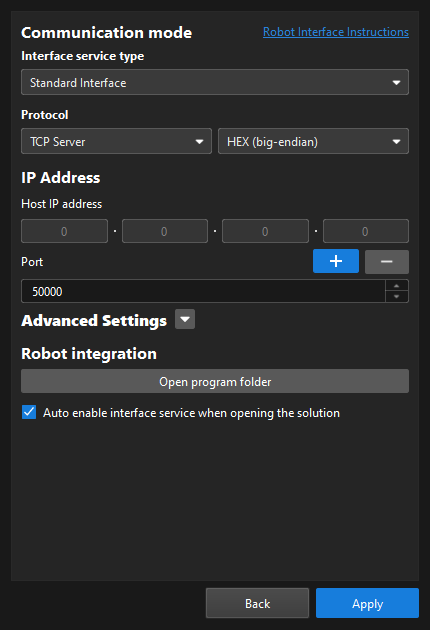
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et HEX (big-endian) pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Configurer la communication sur le boîtier d’enseignement
-
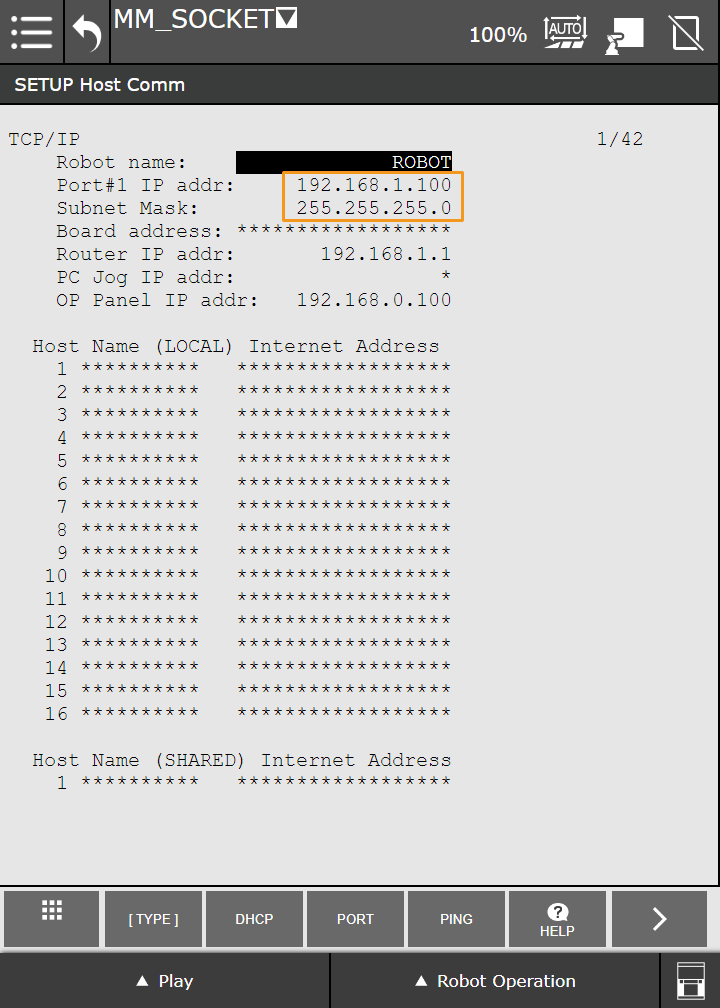
Définissez l’adresse IP du robot.
-
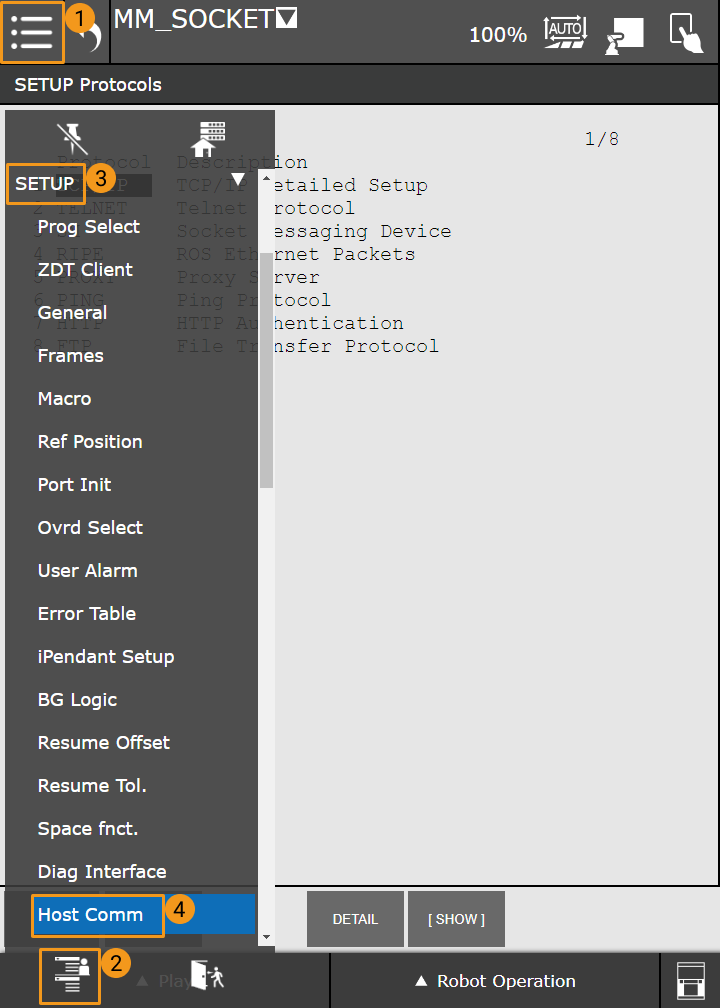
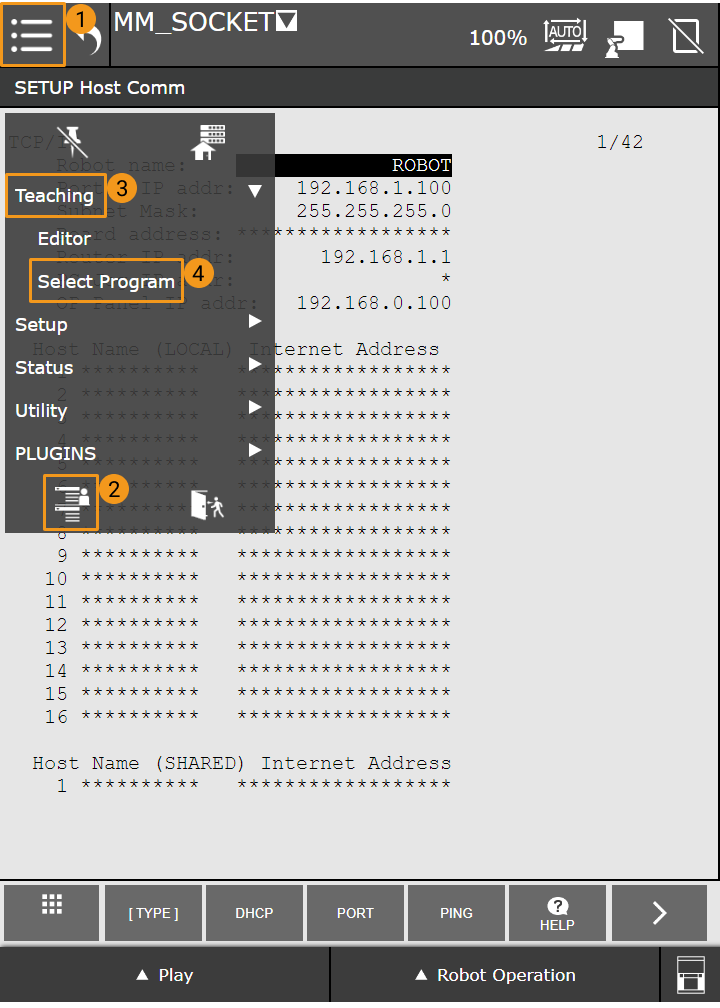
Déployez le menu complet, puis sélectionnez CONFIGURATION > Communication hôte pour ouvrir la fenêtre Protocoles de CONFIGURATION.
-
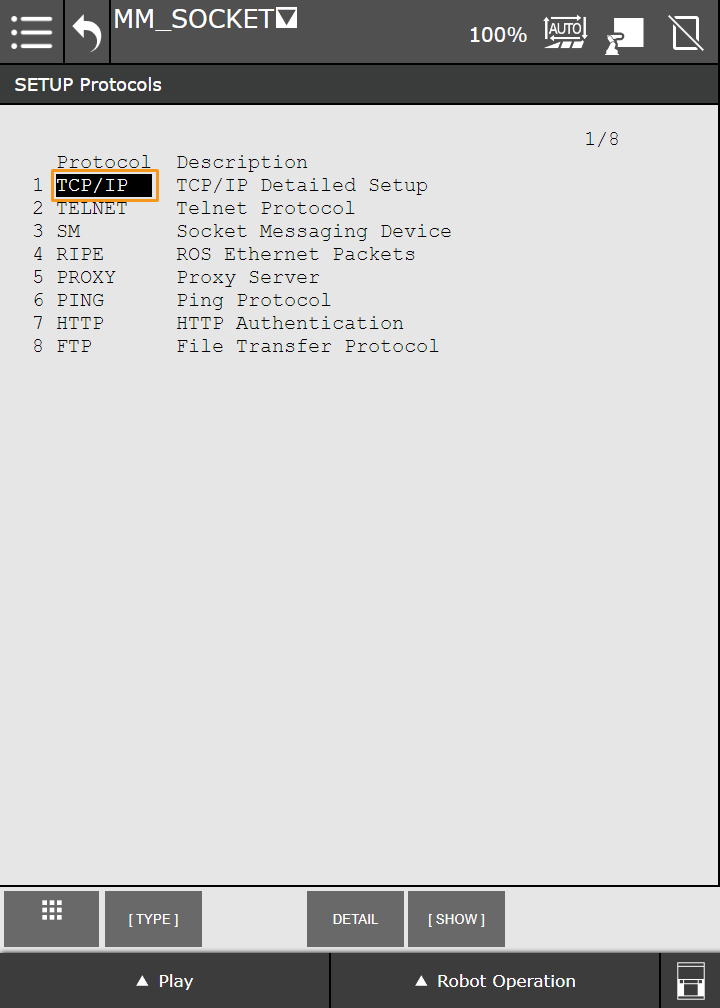
Appuyez sur TCP/IP, puis définissez l'adresse IP et le Masque de sous-réseau.
-
-
Créez un nouveau programme robot.
-
Appuyez sur l’icône Menu et basculez vers le menu fréquemment utilisé, puis sélectionnez Apprentissage > Sélectionner un programme.
-
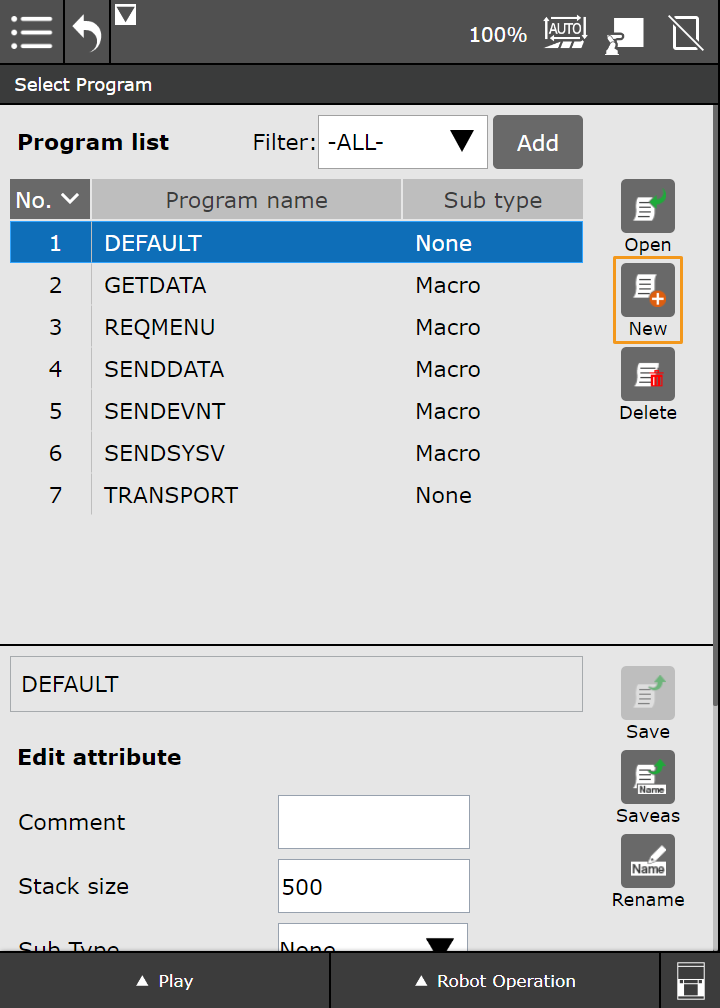
Appuyez sur l’icône Nouveau à droite.
-
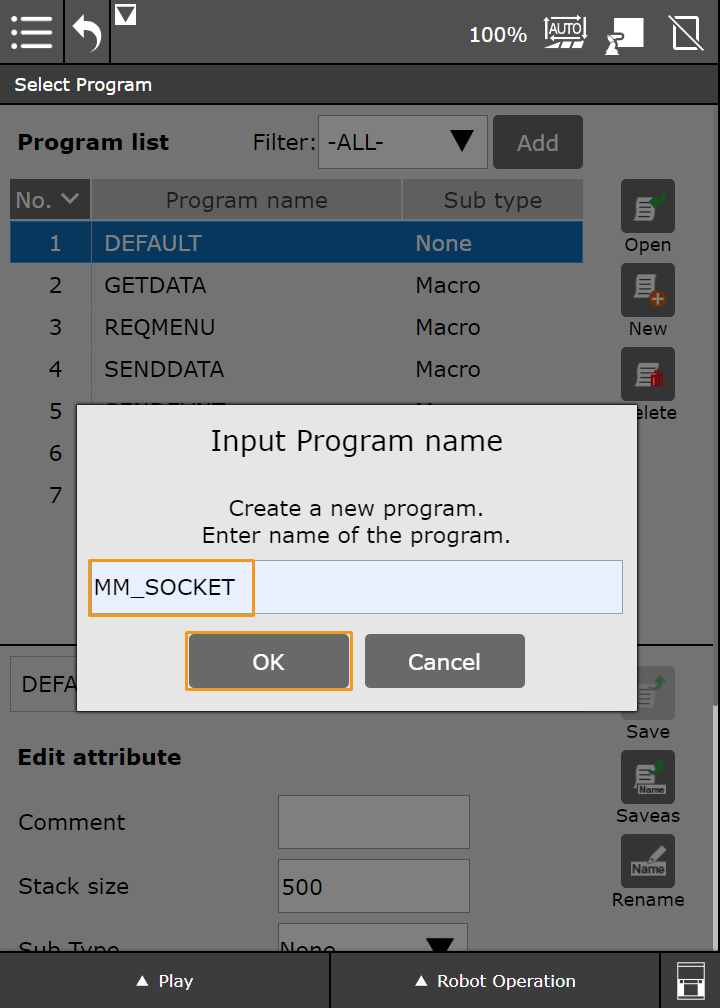
Nommez le programme, par exemple MM_SOCKET, puis sélectionnez OK.
-
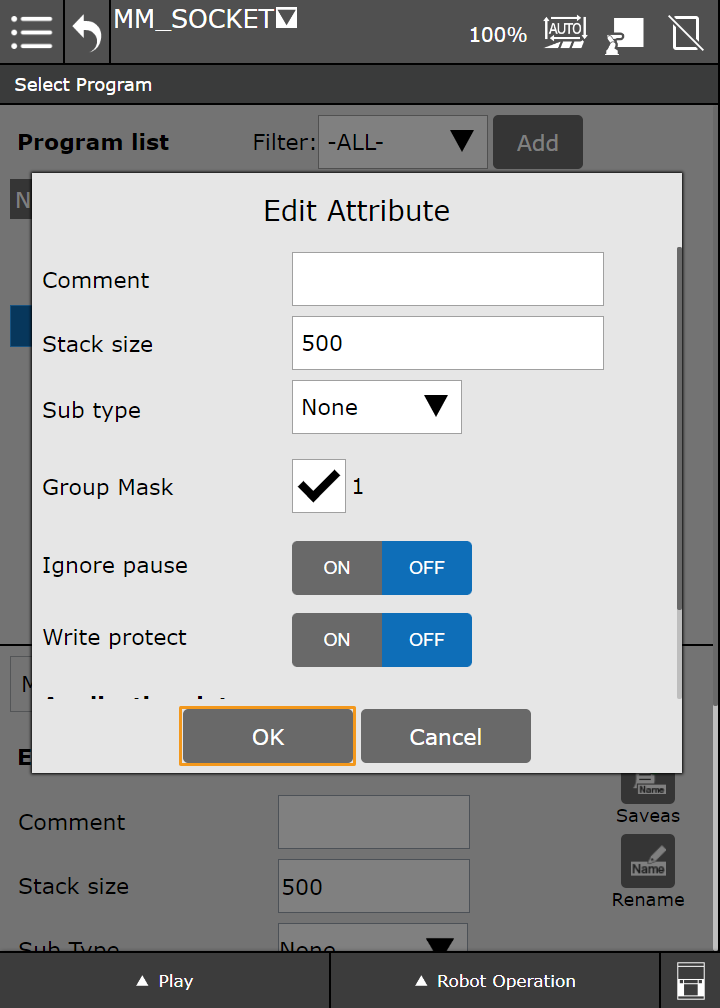
Conservez les paramètres par défaut du programme puis sélectionnez OK.
-
-
Exécutez la commande d’initialisation de la communication.
-
Ouvrez le programme nouvellement créé.
Vous ne pouvez pas éditer le programme ni modifier les paramètres en mode Automatique. Si l’icône en haut à droite est  , qui indique le mode Automatique, vous devez appuyer sur l’icône pour passer en mode Manuel, et l’icône deviendra
, qui indique le mode Automatique, vous devez appuyer sur l’icône pour passer en mode Manuel, et l’icône deviendra  .
.
-
Sélectionnez Programmation > Plugin, et vous pouvez voir les plugins dans le panneau inférieur droit.
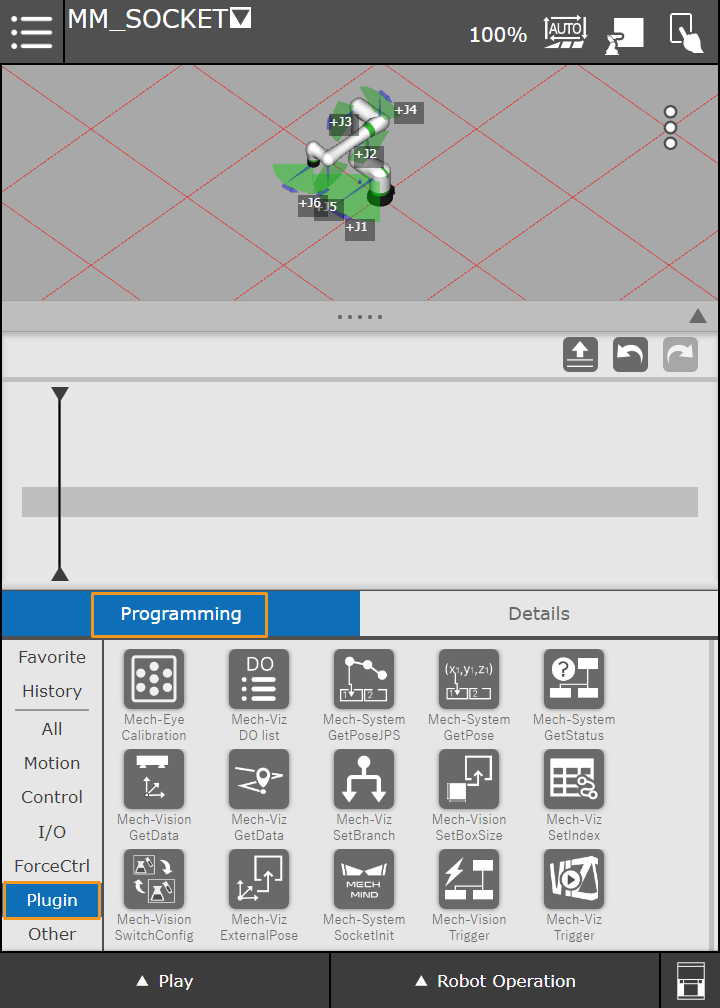
-
Trouvez Mech-System SocketInit, et faites-le glisser vers la ligne du programme.
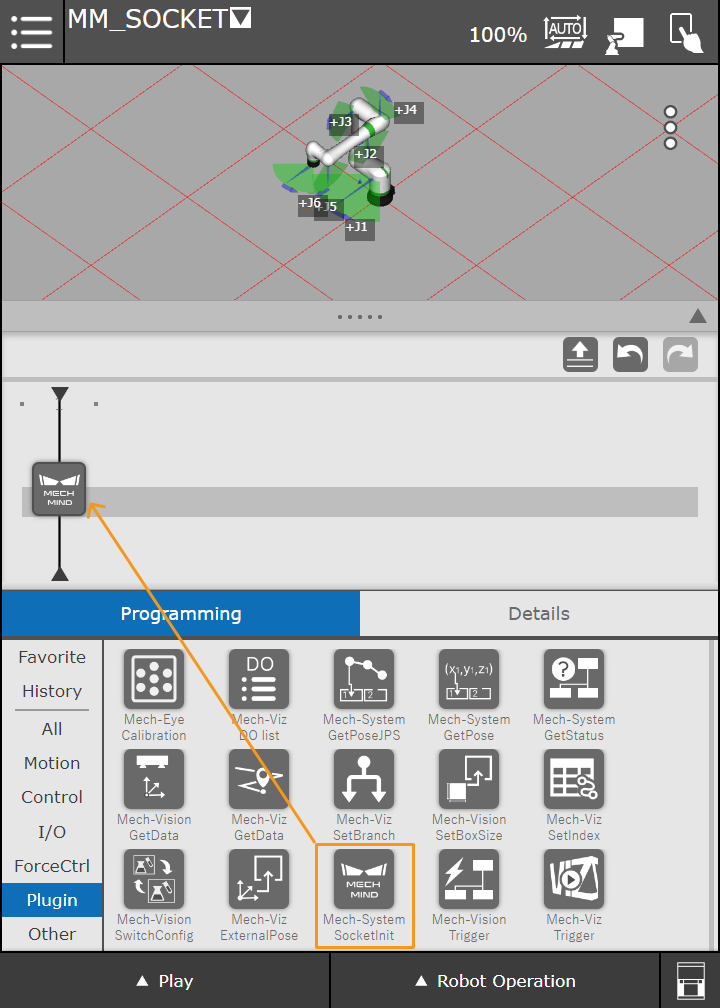
-
Appuyez sur la commande sur la ligne du programme pour en voir les détails. Définissez l'Adresse IP de l’IPC et définissez le Port de l’IPC sur le numéro de port configuré dans Mech-Vision.
Après que le numéro de port du robot (1 à 8) a été modifié pour la première fois, les changements ne prendront effet qu’après le redémarrage du contrôleur du robot.
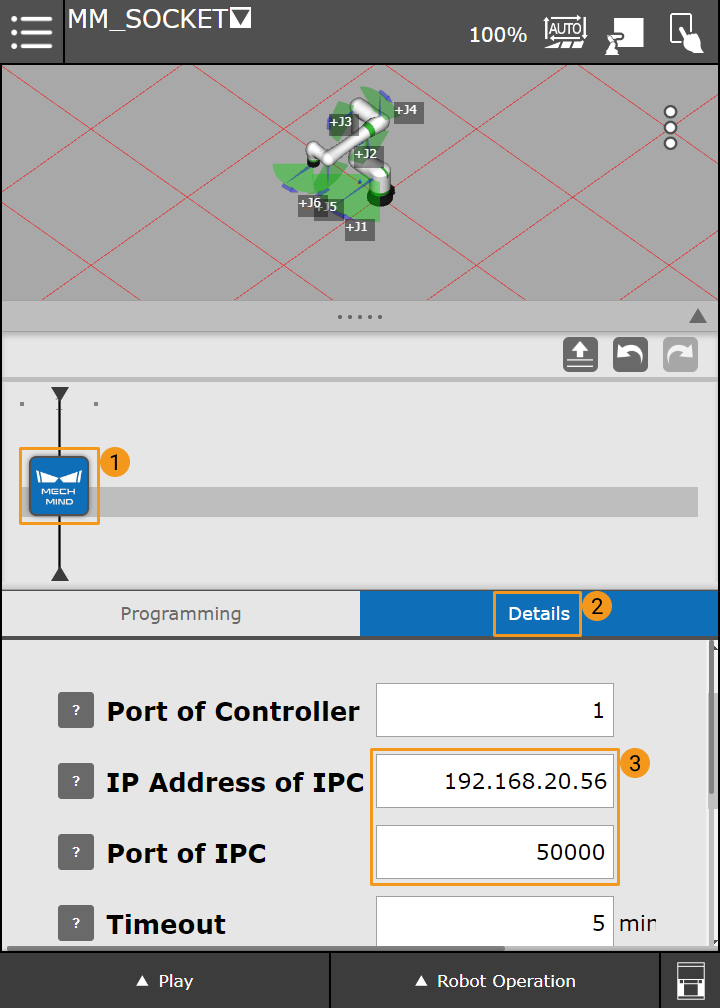
Si vous avez des questions concernant le paramètre à configurer, vous pouvez appuyer de façon prolongée sur le point d’interrogation à gauche pour voir la description détaillée.
-
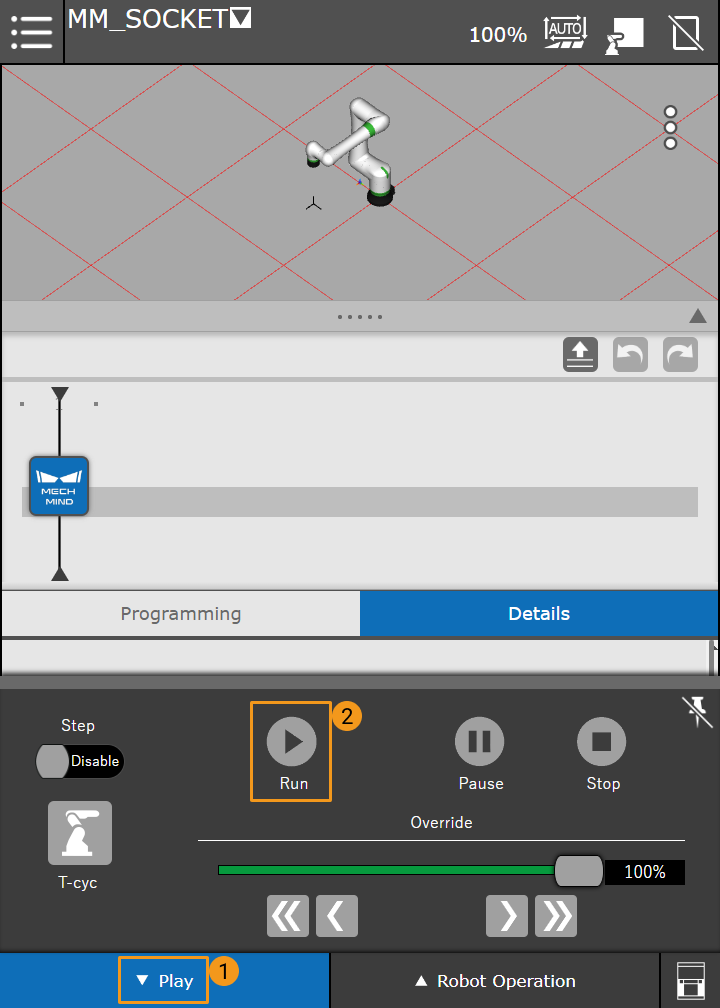
Appuyez sur l’icône du mode Manuel (
) en haut à droite de l’écran pour passer au mode Automatique (). -
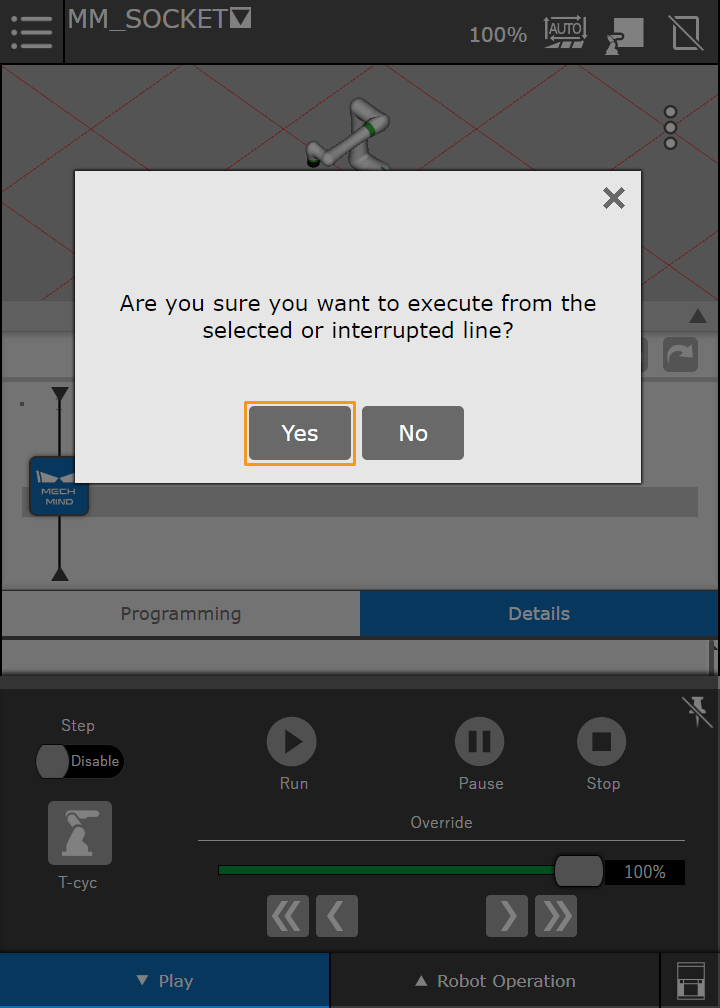
Appuyez sur Lecture dans le coin inférieur gauche puis appuyez sur Exécuter.
-
Sélectionnez Oui dans la boîte de dialogue contextuelle.
-
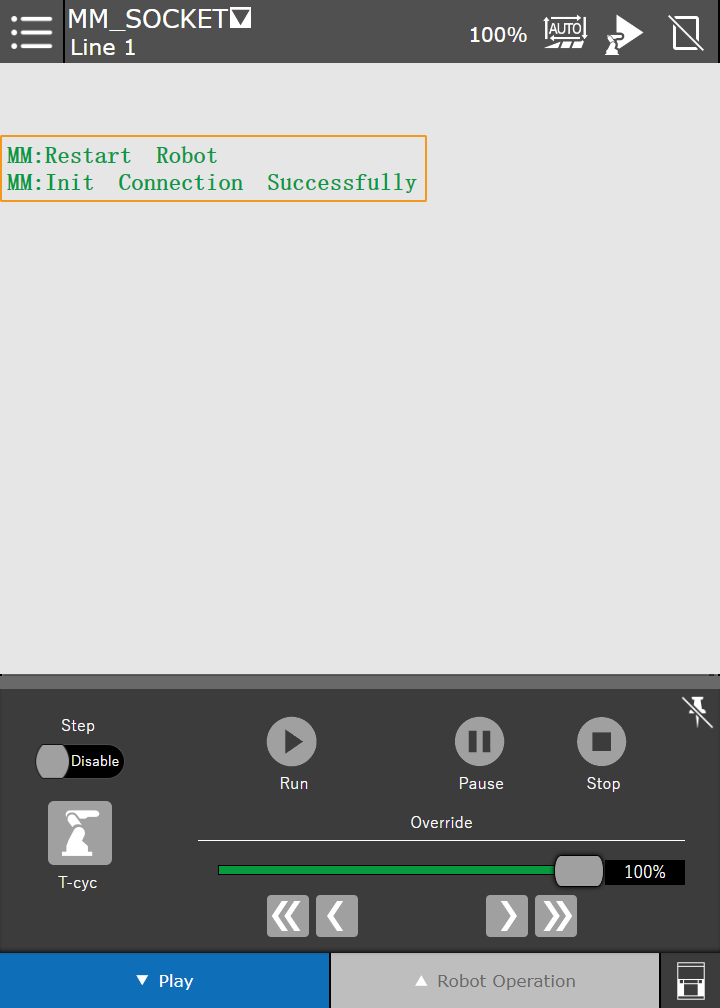
La fenêtre USER s’affiche automatiquement. Si MM: Init Connection Successfully est affiché sur l’interface du boîtier d’enseignement, la communication est établie.
Si l’interface du boîtier d’enseignement affiche MM: Restart Robot ou ne change pas, redémarrez manuellement le contrôleur et réexécutez le programme ci-dessus.
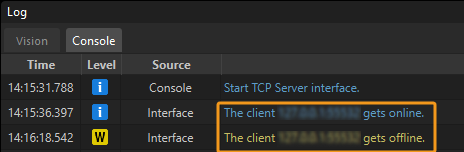
Si le robot est connecté avec succès, l’onglet Console du panneau Journal de Mech-Vision affichera un journal.
-
-
Mettez hors tension le contrôleur du robot puis redémarrez-le.