Exemples de programmes FANUC CRX
Le plugin CRX fournit des programmes de préhension à titre d’exemples. Vous pouvez vous inspirer des exemples et créer vos propres programmes de préhension plus facilement.
Cette section présente le processus de création de deux programmes de préhension simples :
-
Préhension avec Mech-Vision : applicable aux scénarios où seul un projet Mech-Vision est utilisé.
-
Préhension avec Mech-Viz : applicable aux scénarios où des projets Mech-Vision et Mech-Viz sont tous deux utilisés pour la planification de trajectoire.
|
En pratique, veuillez configurer l’outil terminal et définir correctement le TCP au préalable. |
Préhension avec Mech-Vision
Le programme d’exemple ci-dessous déclenche Mech-Vision pour capturer des images et déplacer le robot vers le point de prise.
-
Créez un nouveau programme robot (le nom du programme robot dans cet exemple est MM_EXAMPLE_VISION). Sélectionnez Programmation et, en suivant l’ordre de la figure ci-dessous, faites glisser les commandes de l’onglet TOUT vers la ligne du programme.
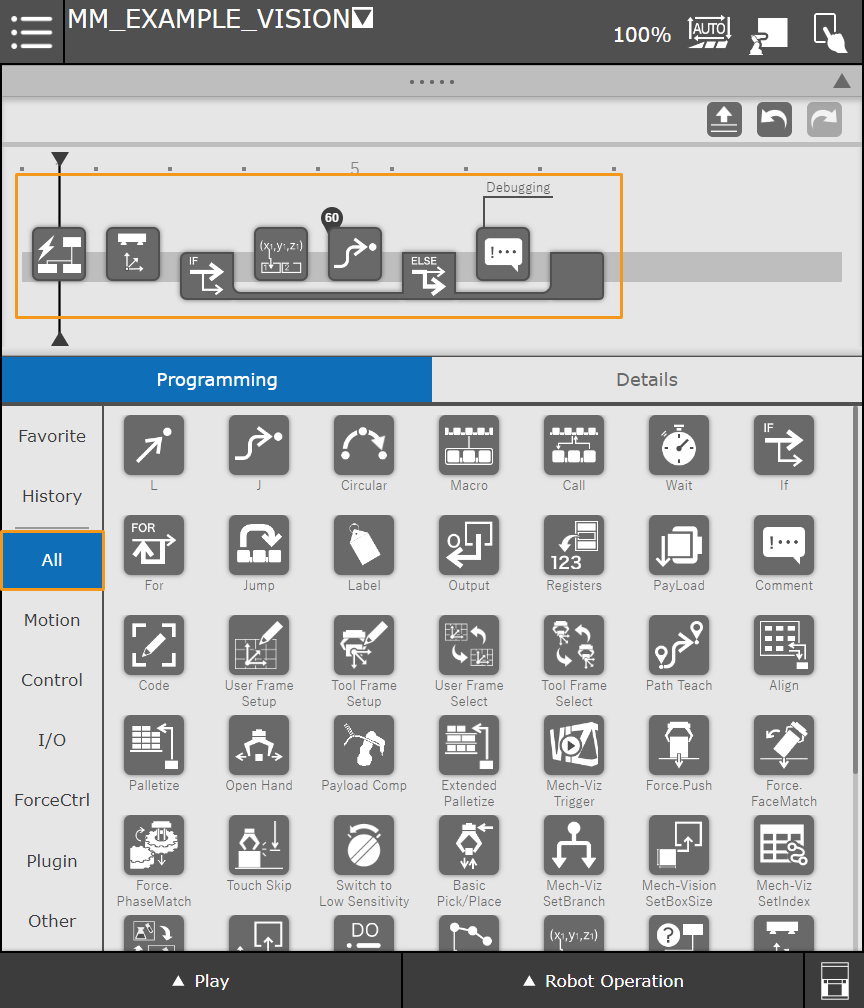
Appuyez sur Commentaire dans la ligne du programme, puis vous pouvez saisir un commentaire, par exemple « Débogage », dans le panneau Détails.
Le flux général du programme est le suivant :
-
La commande Mech-Vision Trigger déclenche l’exécution du projet Mech-Vision spécifié.
-
La commande Mech-Vision GetData obtient le résultat de vision depuis Mech-Vision et stocke le code d’état dans un registre (par exemple R[52]).
-
La commande Si détermine si la trajectoire planifiée a été reçue avec succès.
-
Si le résultat de vision est reçu avec succès, la commande Mech-System GetPose stockera le premier point de prise envoyé par le projet Mech-Vision dans un registre spécifié, puis le robot se déplacera vers le premier point de prise en type de mouvement J (articulé).
-
Si la trajectoire planifiée n’est pas reçue avec succès, un débogage sera effectué. La programmation détaillée du processus de débogage est omise dans cet exemple.
-
-
-
Appuyez sur Si et configurez les paramètres comme indiqué ci-dessous.
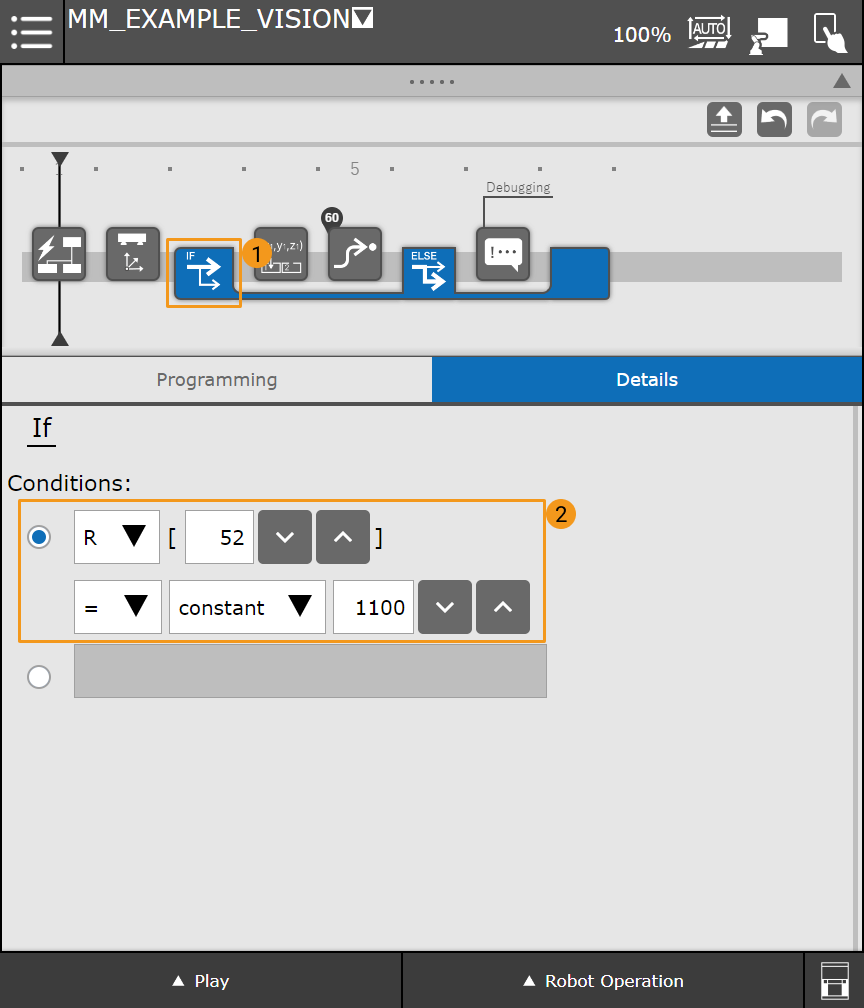
La commande Si vérifiera le code d’état stocké dans R[52]. Si la valeur de R[52] est 1100, le résultat de vision est reçu avec succès, sinon un processus de débogage doit être effectué.
-
Appuyez sur J et configurez le registre de position comme indiqué ci-dessous.
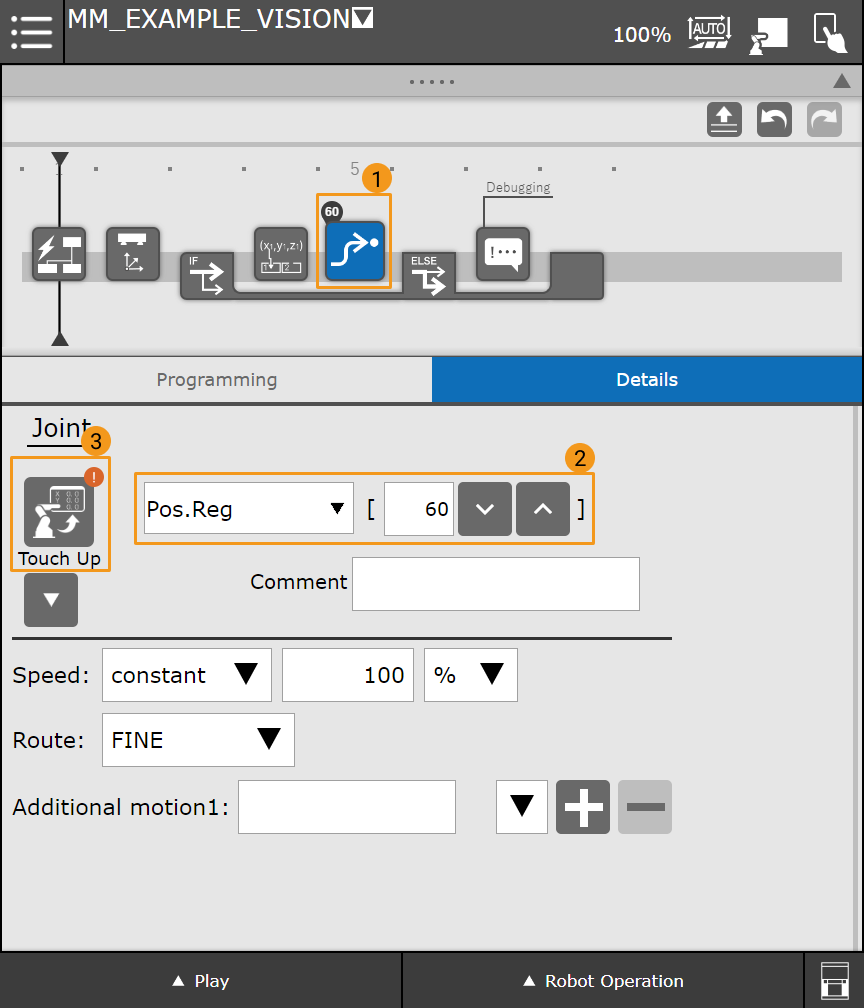
Le premier point de prise envoyé par le projet Mech-Vision est stocké dans PR[60] en tant que TCP. Une fois le point de prise reçu avec succès, le robot se déplacera vers la position PR[60] en type de mouvement moveJ.
Vous avez maintenant construit un programme simple qui utilise Mech-Vision pour la préhension. Une fois que vous avez basculé le pupitre d’enseignement en mode Automatique, vous pouvez sélectionner Lecture dans le coin inférieur gauche et réduire la vitesse. Vous pouvez ensuite appuyer sur Exécuter pour lancer le programme.
Préhension avec Mech-Viz
Tous les points de passage de la trajectoire planifiée par Mech-Viz peuvent être envoyés au robot via Mech-Interface. Le programme d’exemple ci-dessous déclenche Mech-Viz pour planifier une trajectoire et déplacer le robot vers un point de passage de cette trajectoire.
-
Créez un nouveau programme robot (le nom du programme robot dans cet exemple est MM_EXAMPLE_VIZ). Sélectionnez Programmation et, en suivant l’ordre de la figure ci-dessous, faites glisser les commandes de l’onglet TOUT vers la ligne du programme.
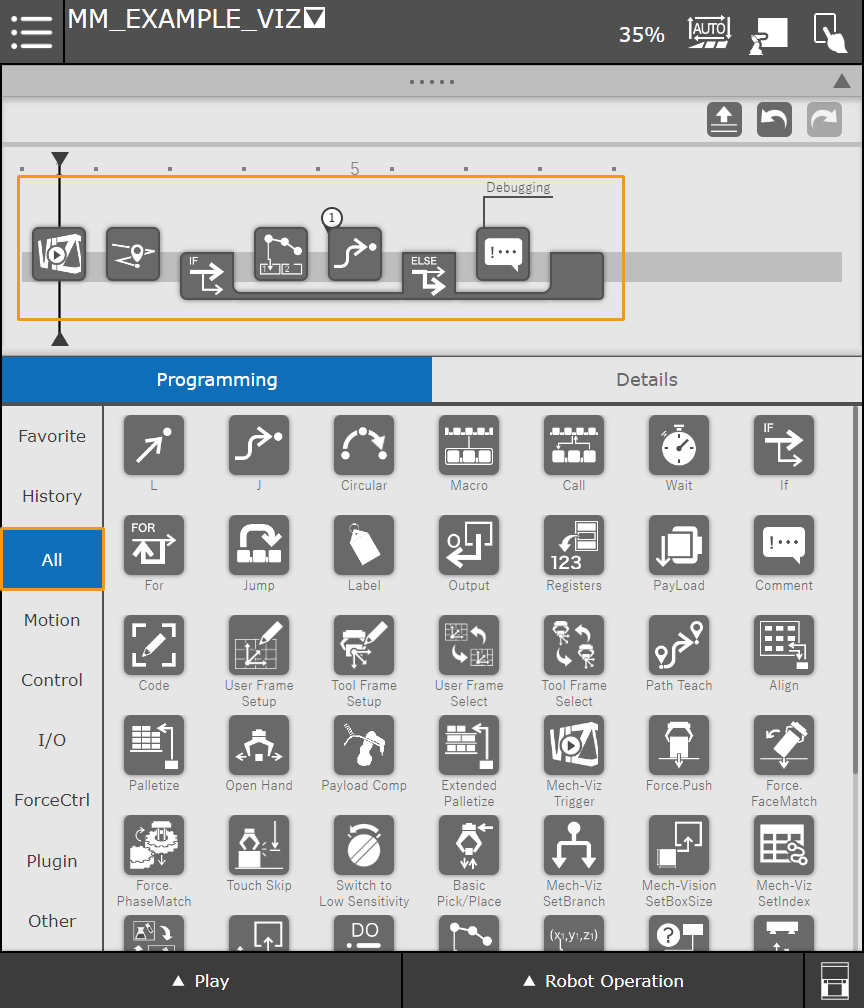
Le flux général du programme est le suivant :
-
La commande Mech-Viz Trigger déclenche l’exécution du projet Mech-Viz.
-
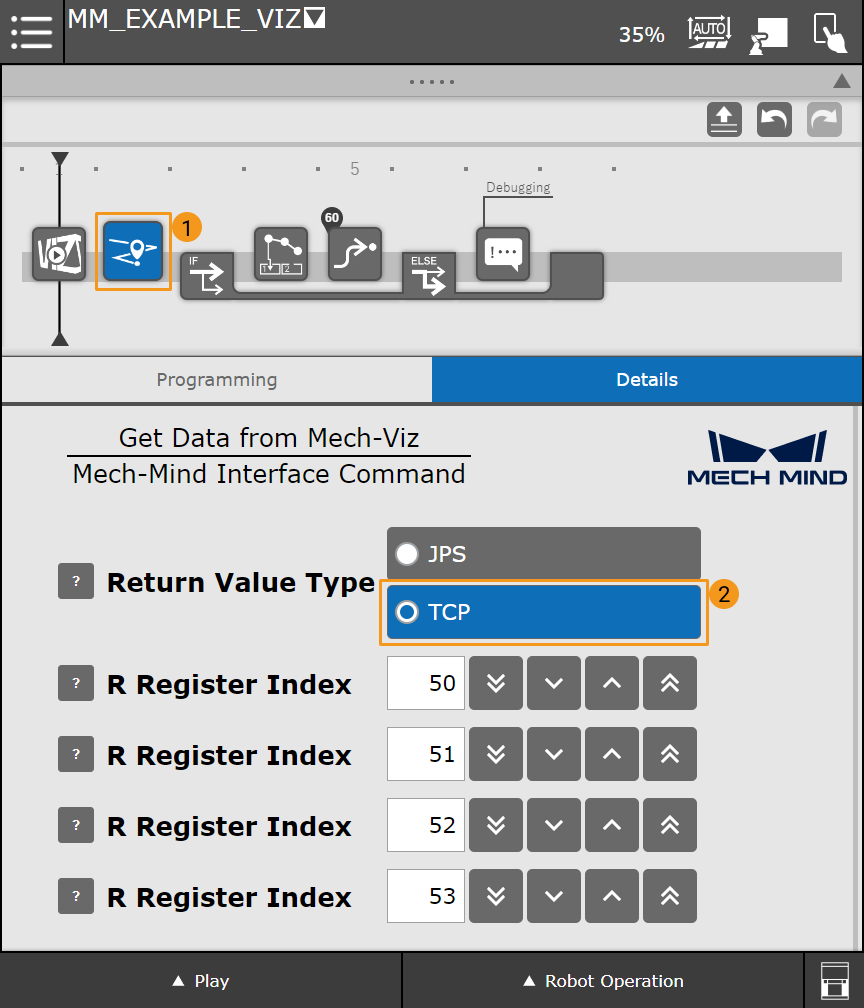
La commande Mech-Viz GetData obtient la trajectoire planifiée de Mech-Viz et stocke le code d’état dans un registre (par exemple R[53]).
-
La commande Si détermine si la trajectoire planifiée a été reçue avec succès.
-
Si la trajectoire planifiée est reçue avec succès, la commande Mech-System GetPoseJPS stockera le premier point de passage envoyé par le projet Mech-Viz dans un registre spécifié, puis le robot se déplacera vers le premier point de passage en type de mouvement J (articulé).
-
Si la trajectoire planifiée n’est pas reçue avec succès, un débogage sera effectué. La programmation détaillée du processus de débogage est omise dans cet exemple.
-
-
-
Appuyez sur Si et configurez les paramètres comme indiqué ci-dessous.
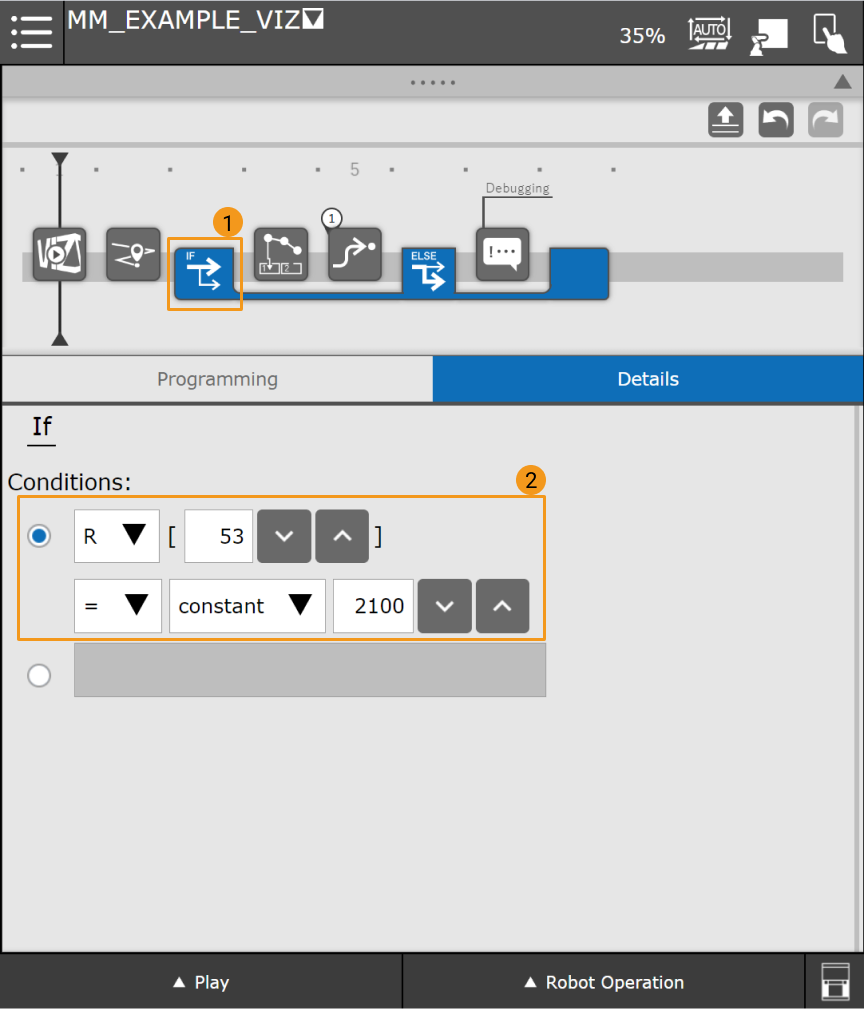
La commande Si vérifiera le code d’état stocké dans R[53]. Si la valeur de R[53] est 2100, la trajectoire planifiée est reçue avec succès ; sinon, un processus de débogage doit être effectué.
-
Appuyez sur J et configurez le registre de position comme indiqué ci-dessous.
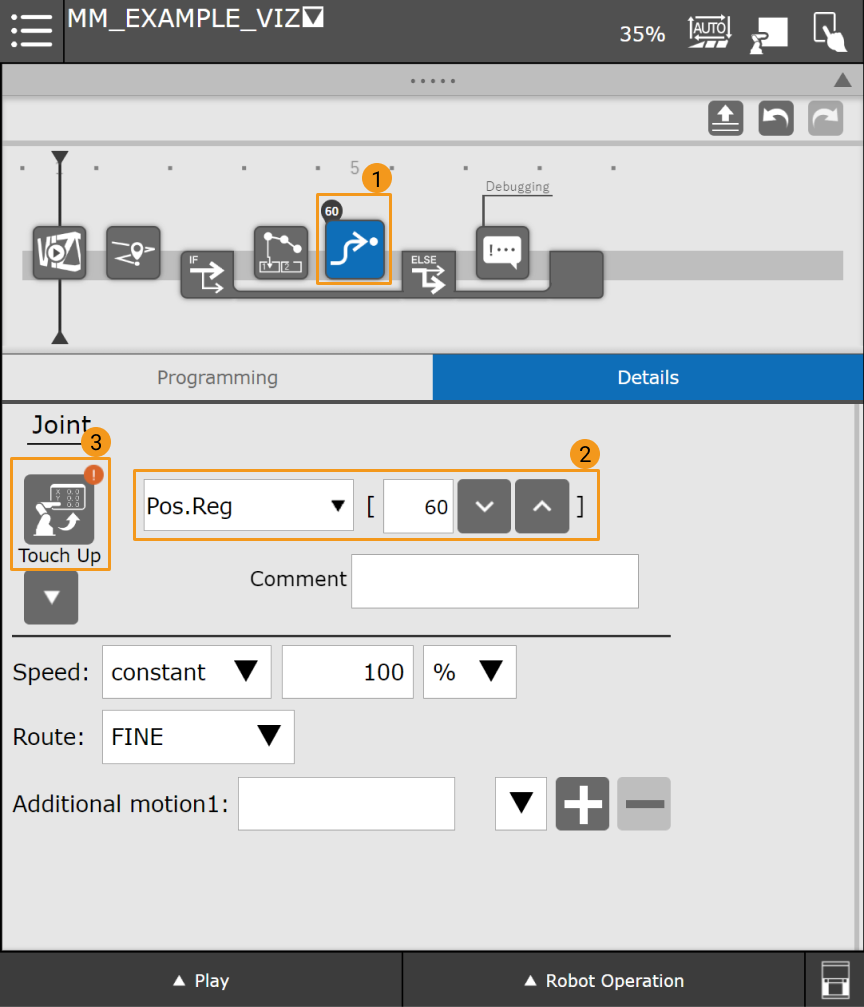
Le premier point de passage envoyé par le projet Mech-Viz est stocké dans PR[60] en tant que positions articulaires. Une fois la trajectoire planifiée reçue avec succès, le robot se déplacera vers la position PR[60] en type de mouvement J (articulé).
Si vous souhaitez envoyer des points de passage en TCP, veuillez modifier le type de valeur de retour dans Mech-Viz GetData à TCP. Ensuite, la commande « Mech-System GetPoseJPS » stockera des poses comme des TCP dans PR[60].
Vous avez maintenant construit un programme simple qui utilise Mech-Viz pour planifier la trajectoire de préhension. Une fois que vous avez basculé le pupitre d’enseignement en mode Automatique, vous pouvez sélectionner Lecture dans le coin inférieur gauche et réduire la vitesse. Vous pouvez ensuite appuyer sur Exécuter pour lancer le programme.