Comment dépanner les échecs de communication Master-Control ?
Si la communication Master-Control ne peut pas être établie entre le système de vision Mech-Mind et le robot, les raisons suivantes peuvent en être la cause. Vous pouvez vérifier les éléments de configuration en suivant l’ordre de ce guide.
1. Système du contrôleur
1.1. Vérifier si les modules de contrôle requis sont installés
Problème
Certains modules de contrôle requis pour la marque de robot ne sont pas installés.
Solution
Assurez-vous que les modules de contrôle sont installés sur le système du robot conformément aux instructions de configuration de communication du constructeur du robot.
1.2. La version du robot ou du contrôleur est incompatible avec la version du système de vision
Problème
Les fabricants de robots mettent régulièrement à niveau les contrôleurs de robots. La version de votre contrôleur peut différer de la version de contrôleur prise en charge par le système de vision Mech-Mind. Dans ce cas, si vous chargez des programmes Master-Control sur votre robot, des problèmes peuvent survenir, tels que des incohérences de données entre ports, des divergences fonctionnelles des commandes robot et des incompatibilités de code de programme. Vous devez donc vérifier si vous souhaitez poursuivre la communication Master-Control.
Solution
-
Si le modèle de votre contrôleur et le modèle de contrôleur pris en charge ne correspondent pas, il est très probable que votre modèle de contrôleur ne soit pas pris en charge par le système de vision Mech-Mind pour la communication Master-Control.
-
Si le modèle de contrôleur correspond au modèle pris en charge mais que les numéros de version diffèrent, l’ingénieur sur site peut tenter de poursuivre la communication Master-Control conformément à la documentation fournie. Cependant, dans ce cas, Mech-Mind ne garantit pas que la communication Master-Control que vous configurez fonctionnera normalement. Si vous avez des questions, veuillez contacter le support technique de Mech-Mind.
2. Réseaux
2.1. Le port IP du robot spécifié et le port utilisé ne correspondent pas
Problème
Certaines marques de robots peuvent fournir deux ports Ethernet, tels que le port 1 et le port 2, sur leur carte mère CPU. Le câble Ethernet est branché sur le port 1, mais une adresse IP correspondant au port 2 est spécifiée.
Solution
Ouvrez le contrôleur et assurez-vous que le port dans lequel le câble Ethernet est branché correspond à l’adresse IP spécifiée.
2.2. Le port IP de l’IPC spécifié et le port utilisé ne correspondent pas
Problème
Certaines marques d’IPC peuvent fournir deux ports Ethernet, tels que le port 1 et le port 2, sur leur carte mère CPU. Le câble Ethernet est branché sur le port 1, mais une adresse IP correspondant au port 2 est spécifiée.
Solution
Branchez et débranchez à plusieurs reprises le câble Ethernet de l’IPC tout en observant le panneau de l’adaptateur réseau pour surveiller l’état de la connexion. De cette manière, la correspondance entre les ports et les adresses IP peut être déterminée.
2.3. Paramétrage du pare-feu de l’IPC inapproprié
Problème
Le pare-feu de l’IPC considère la connexion entre le système de vision et le robot comme malveillante et ferme la connexion.
Solution
Désactivez tous les paramètres de pare-feu ou configurez des règles de pare-feu appropriées. Pour plus d’informations, voir Comment dépanner les échecs de communication causés par des pare-feux ?.
2.4. Paramétrage du routeur inapproprié
Problème
Lorsque les paramètres du routeur sont inappropriés, la communication ne peut pas être établie.
Solution
Désactivez le routeur puis testez la communication directe entre le système de vision et le robot. Si la communication directe entre le système de vision et le robot peut être établie, testez la communication entre les deux via un routeur. Si la communication entre les deux via un routeur échoue, consultez le manuel du routeur pour vérifier les paramètres du routeur.
2.5. Les adresses IP de l’IPC et du robot ne sont pas dans le même sous-réseau
Problème
Les paramètres d’adresse IP ou de masque de sous-réseau de l’IPC ou du robot sont inappropriés, les plaçant sur des sous-réseaux différents et empêchant la communication.
Solution
Vérifiez les paramètres d’adresse IP et de masque de sous-réseau de l’IPC et du robot pour vous assurer que les deux adresses IP se trouvent dans le même sous-réseau, puis testez si la communication peut être établie en utilisant les deux adresses IP. Si la communication peut être établie, les deux adresses IP sont valides.
2.6. L’adresse IP du robot dans Mech-Viz et l’adresse IP réelle du robot ne correspondent pas
Problème
L’adresse IP du robot spécifiée dans l’interface suivante et l’adresse IP réelle du robot ne correspondent pas, entraînant un échec des communications.
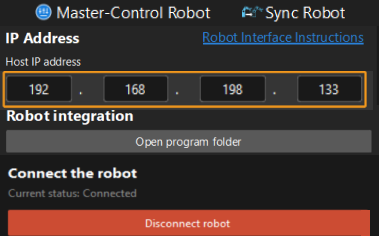
Solution
Assurez-vous que l’adresse IP du robot spécifiée est bien l’adresse IP réelle du robot.
3. Programmes Master-Control
| Si vous n’avez pas besoin de charger des programmes Master-Control, ignorez cette section. |
3.1. D’autres programmes au premier plan ou en arrière-plan s’exécutent pendant le chargement des fichiers de programme
Problème
Lorsqu’un fichier de programme Master-Control est chargé sur un robot qui contient déjà le même programme, le chargement échouera car le même programme est en cours d’utilisation.
Solution
Sur l’interface du boîtier d’apprentissage, désactivez le programme au premier plan ou en arrière-plan du robot.
3.2. Des fichiers de programme Master-Control incorrects sont chargés
Problème
Si un fichier de programme Master-Control incorrect est chargé, la communication échouera.
Solution
Sur l’interface du boîtier d’apprentissage, assurez-vous que le fichier de programme Master-Control correct est chargé sur le système du robot.