Principes de la calibration main-œil
La calibration main-œil est une méthode couramment utilisée dans les systèmes robotiques et de vision, visant à déterminer la relation de transformation entre le repère de la caméra et le repère de l’extrémité du robot (généralement le repère de l’outil). En réalisant une calibration main-œil, l’espace du système de vision peut être aligné avec celui du système robotique, ce qui permet des tâches telles que des opérations guidées par la vision et une localisation précise.
Cette section décrit les relations entre diverses poses ou points lors de la calibration main-œil.
|
Différentes formes de symboles sont utilisées pour représenter des points et des poses. La lettre majuscule T désigne des poses. Par exemple, robotTflange représente la pose de la bride du robot par rapport à la base du robot. La lettre minuscule p désigne des points. Par exemple, robotpboard-robot indique la relation d’un point de référence sur la plaque de calibration par rapport à la base du robot. |
Calibration main-œil dans la configuration ETH (poses multiples et aléatoires de la plaque de calibration)
Lorsque l’on choisit la méthode des poses multiples et aléatoires de la plaque de calibration pour la calibration main-œil dans des scénarios ETH, les relations entre les poses de la caméra, de la base du robot, de la bride du robot et de la plaque de calibration sont illustrées sous forme de boucle fermée dans le diagramme ci-dessous.
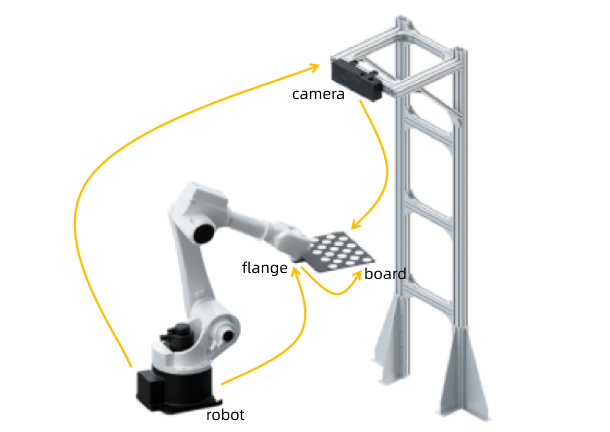
Pour mieux comprendre les relations entre les poses exprimées sous forme d’équations, vous pouvez vous référer au tableau ci-dessous pour connaître les méthodes de représentation de chaque pose relative.
| Pose | Relation | Remarque |
|---|---|---|
robotTflange |
Pose de la bride du robot par rapport à la base du robot |
Disponible côté robot |
cameraTboard |
Pose de la plaque de calibration par rapport à la caméra |
Peut être obtenue en capturant une image avec la caméra et en calculant |
flangeTboard |
Pose de la plaque de calibration par rapport à la bride du robot |
Constante dans la calibration des paramètres extrinsèques, utilisée pour établir les équations |
robotTcamera |
Pose de la caméra par rapport à la base du robot (paramètre extrinsèque) |
Résultat de la calibration des paramètres extrinsèques, à calculer |
Sur la base du diagramme ci-dessus et des relations de pose mentionnées, les équations suivantes peuvent être dérivées.

Calibration main-œil dans la configuration EIH (poses multiples et aléatoires de la plaque de calibration)
Lorsque l’on choisit la méthode des poses multiples et aléatoires de la plaque de calibration pour la calibration main-œil dans des scénarios EIH, les relations entre les poses de la caméra, de la base du robot, de la bride du robot et de la plaque de calibration sont illustrées sous forme de boucle fermée dans le diagramme ci-dessous.
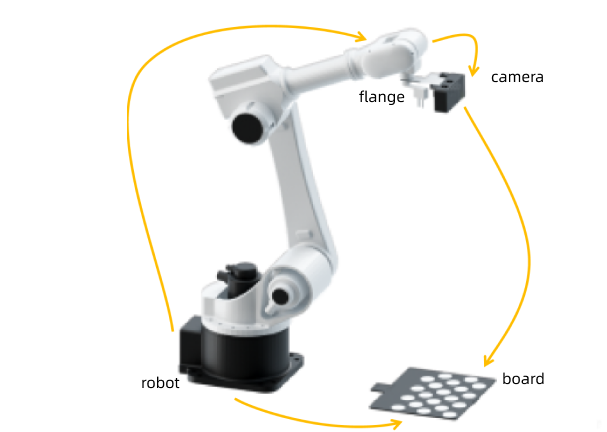
Pour mieux comprendre les relations entre les poses exprimées sous forme d’équations, vous pouvez vous référer au tableau ci-dessous pour connaître les méthodes de représentation de chaque pose relative.
| Pose | Relation | Remarque |
|---|---|---|
robotTflange |
Pose de la bride du robot par rapport à la base du robot |
Disponible côté robot |
cameraTboard |
Pose de la plaque de calibration par rapport à la caméra |
Peut être obtenue en capturant une image avec la caméra et en calculant |
robotTboard |
Pose de la plaque de calibration par rapport à la base du robot |
Constante dans la calibration des paramètres extrinsèques, utilisée pour établir les équations |
flangeTcamera |
Pose de la caméra par rapport à la bride du robot (paramètre extrinsèque) |
Résultat de la calibration des paramètres extrinsèques, à calculer |
Sur la base du diagramme ci-dessus et des relations de pose mentionnées, les équations suivantes peuvent être dérivées.

Calibration main-œil dans la configuration ETH (contact TCP)
Lorsque l’on choisit la méthode de contact TCP pour la calibration main-œil dans des scénarios ETH, les relations relatives entre les poses/points lors de la capture d’image et du contact TCP sont illustrées sous forme de boucle fermée dans le diagramme ci-dessous.
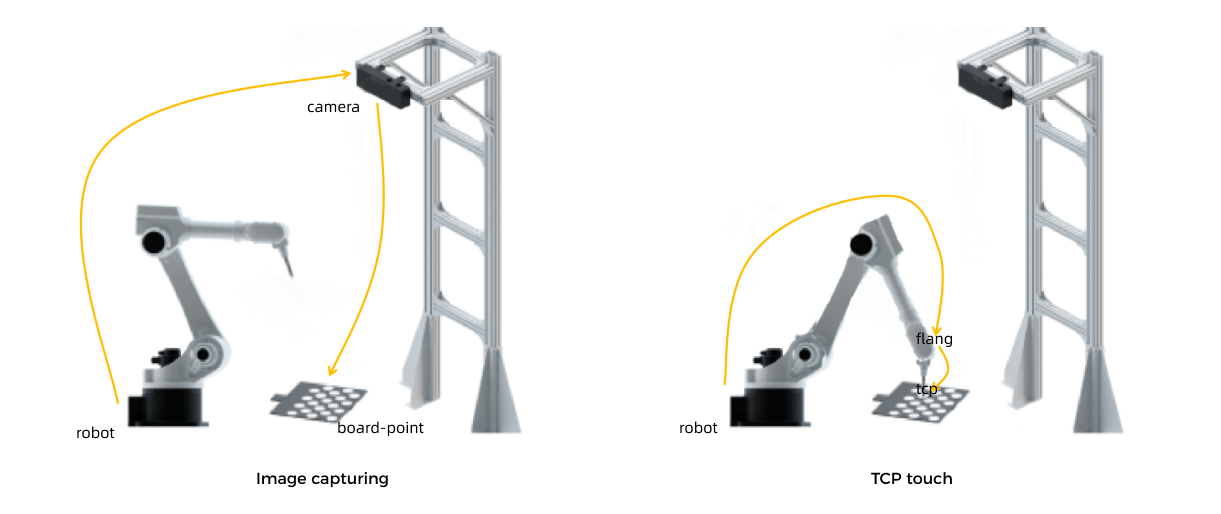
Pour mieux comprendre les relations entre les poses exprimées sous forme d’équations, vous pouvez vous référer au tableau ci-dessous pour connaître les méthodes de représentation de chaque pose/point relative.
| Capture d’image/Contact TCP | Pose/point | Relation | Remarque |
|---|---|---|---|
Capture d’image |
camerapboard-point |
Le point de référence sur la plaque de calibration capturé par la caméra, reflétant la relation entre le point de référence et la caméra |
Peut être obtenu en capturant une image avec la caméra et en calculant |
robotTcamera |
Pose de la caméra par rapport à la base du robot (paramètre extrinsèque) |
Résultat de la calibration des paramètres extrinsèques, à calculer |
|
Contact TCP |
robotTflange |
Pose de la bride du robot par rapport à la base du robot pendant le contact TCP |
Disponible côté robot |
flangeptcp |
TCP du robot, qui indique la relation entre l’extrémité de l’outil et l’extrémité de la bride. |
Constante dans la calibration des paramètres extrinsèques, utilisée pour établir les équations |
|
robotptcp |
TCP du robot, qui reflète la relation entre le TCP et la base du robot pendant le contact TCP. |
Peut être calculé à partir de flangeptcp et robotTflange |
Sur la base du diagramme et des relations mentionnées ci-dessus, des équations pour la capture d’image et le contact TCP peuvent être dérivées séparément.
Pendant la capture d’image, la relation entre le point de référence sur la plaque de calibration et la base du robot peut être calculée en utilisant les relations connues décrites ci-dessus.

Pendant le contact TCP, la relation entre le point de référence sur la plaque de calibration et la base du robot peut également être calculée en utilisant les relations connues décrites ci-dessus.

À partir de ces deux équations, l’équation suivante peut être établie.

Calibration main-œil dans la configuration EIH (contact TCP)
Lorsque l’on choisit la méthode de contact TCP pour la calibration main-œil dans des scénarios EIH, les relations relatives entre les poses/points lors de la capture d’image et du contact TCP sont illustrées sous forme de boucle fermée dans le diagramme ci-dessous.
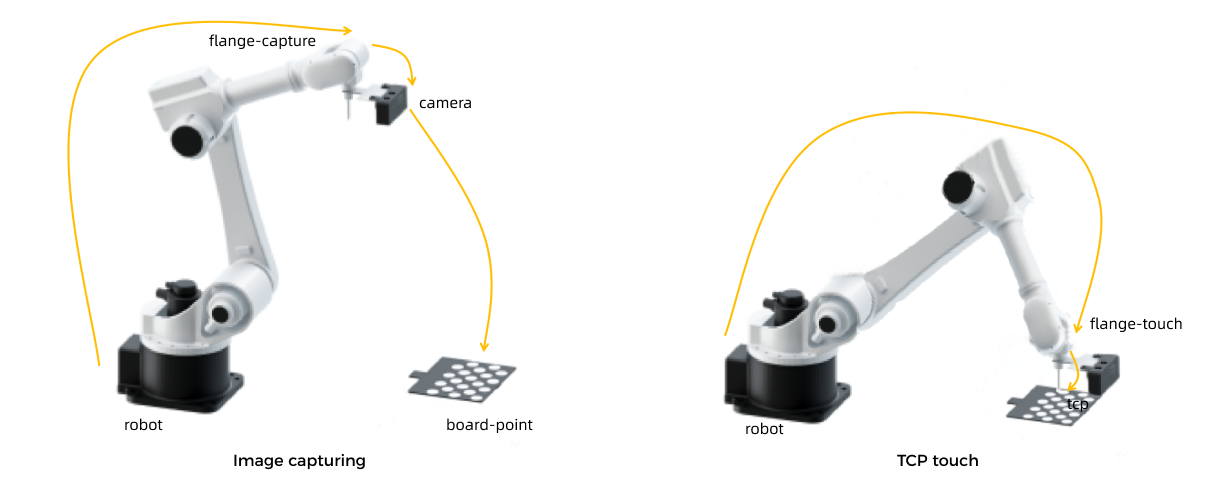
Pour mieux comprendre les relations entre les poses exprimées sous forme d’équations, vous pouvez vous référer au tableau ci-dessous pour connaître les méthodes de représentation de chaque pose/point relative.
| Capture d’image/Contact TCP | Pose | Relation | Remarque |
|---|---|---|---|
Capture d’image |
robotTflange-capture |
Pose de la bride du robot par rapport à la base du robot pendant la capture d’image |
Disponible côté robot |
flange-captureTcamera |
Pose de la caméra par rapport à la bride du robot (paramètre extrinsèque) |
Résultat de la calibration des paramètres extrinsèques, à calculer |
|
camerapboard-point |
Le point de référence sur la plaque de calibration capturé par la caméra, reflétant la relation entre le point de référence et la caméra |
Peut être obtenu en capturant une image avec la caméra et en calculant |
|
Contact TCP |
robotTflange-touch |
Pose de la bride du robot par rapport à la base du robot pendant le contact TCP |
Disponible côté robot |
flange-touchptcp |
TCP du robot, qui indique la relation entre l’extrémité de l’outil et l’extrémité de la bride. |
Constante dans la calibration des paramètres extrinsèques, utilisée pour établir les équations |
|
robotptcp |
TCP du robot, qui reflète la relation entre le TCP et la base du robot pendant le contact TCP. |
Peut être calculé à partir de robotTflange-touch et flangeptcp |
Sur la base du diagramme et des relations mentionnées ci-dessus, des équations pour la capture d’image et le contact TCP peuvent être dérivées séparément.
Pendant la capture d’image, la relation entre le point de référence sur la plaque de calibration et la base du robot peut être calculée en utilisant les relations décrites ci-dessus.

Pendant le contact TCP, la relation entre le point de référence sur la plaque de calibration et la base du robot peut également être calculée en utilisant les relations connues décrites ci-dessus.

À partir de ces deux équations, l’équation suivante peut être établie.
