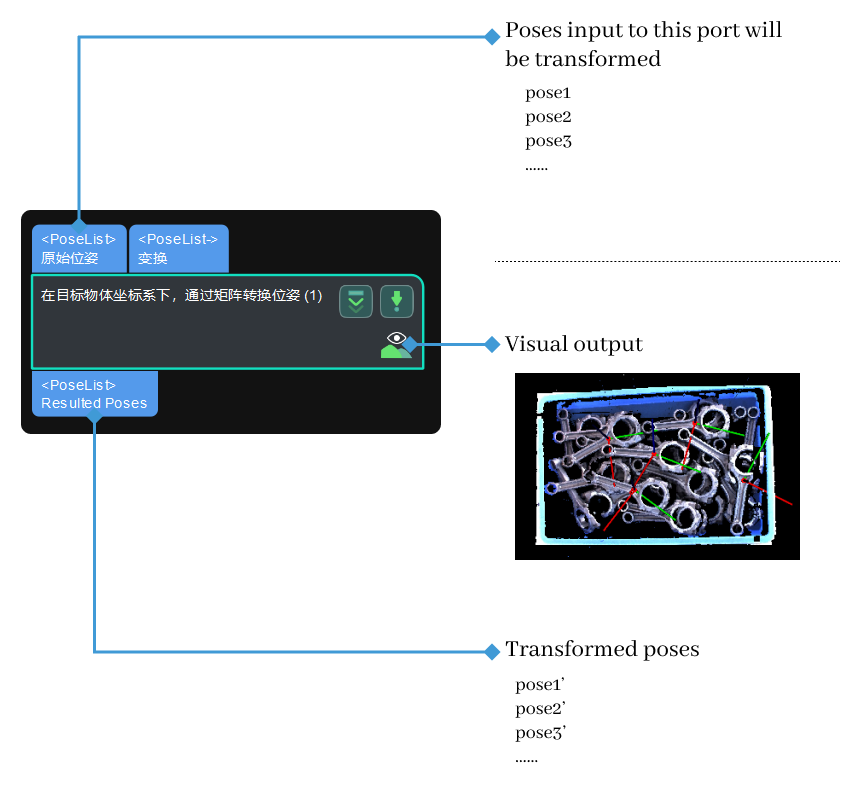
Transformer les poses par matrice dans les repères d’objet
|
Le contenu de cette étape est en cours de maintenance. Si vous avez besoin d’informations urgentes sur cette étape, veuillez visiter Communauté en ligne de Mech-Mind. |
Scénario d’utilisation
Une étape générale de transformation de pose. Aucun scénario d’utilisation fixe.