Valider la répétabilité de la pose
Après avoir construit le projet de vision, vous pouvez vérifier la stabilité du projet en validant la répétabilité des poses.
Méthode de validation
Validez la répétabilité de la reconnaissance du projet à l’aide de l’Étape « Vérifier la répétabilité des poses par des statistiques » dans le logiciel Mech-Vision.
Le processus de validation est présenté ci-dessous:
-
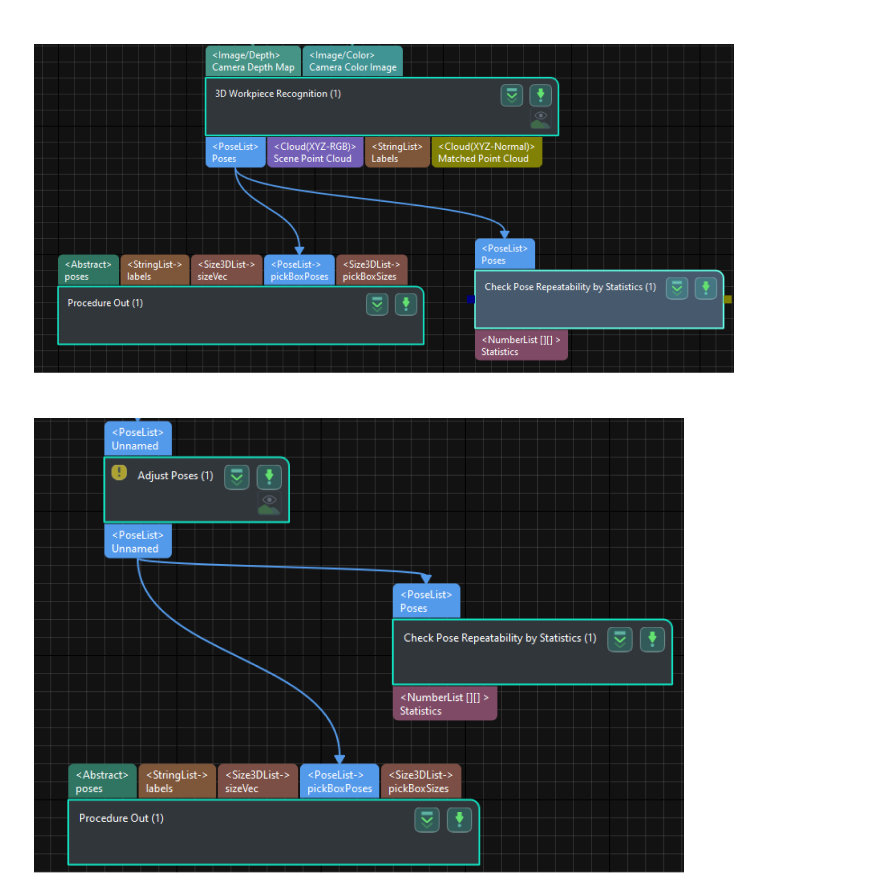
L’Étape « Vérifier la répétabilité des poses par des statistiques » a été ajoutée au projet.
Cette étape peut être connectée après une étape qui fournit la pose de l’objet cible, comme illustré dans la figure suivante.
-
Placez une seule pièce dans le champ de vision de la caméra, puis exécutez le projet 10 à 20 fois pour capturer et enregistrer les poses sorties par le projet pour cette pièce. Cela permet de déterminer la répétabilité des poses.
-
Ouvrez le fichier de données statistiques pour consulter les valeurs de répétabilité des poses.
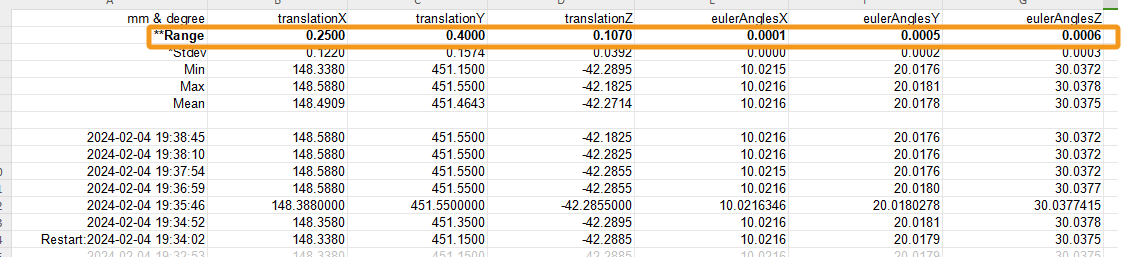
Comme montré ci-dessus, la colonne « plage » du tableau indique la répétabilité de la pose de l’objet cible à cette position fixe:
-
La plage d’erreur des coordonnées de l’axe x est d’environ ±0.25 mm.
-
La plage d’erreur des coordonnées de l’axe y est d’environ ±0.40 mm.
-
La plage d’erreur des coordonnées de l’axe z est d’environ ±0.11 mm.
-
-
Si la zone de prélèvement est relativement grande, ou si le prélèvement est instable dans certaines zones, veuillez collecter des statistiques de répétabilité des poses pour la même pièce à plusieurs emplacements.
Pour des scénarios de prélèvement en bac profond, recueillez des statistiques de répétabilité des poses à différents emplacements et à différentes hauteurs. Par exemple, vous pouvez diviser le plan du bac en zones en grille de neuf cases, puis collecter des statistiques de répétabilité des poses à différentes hauteurs. 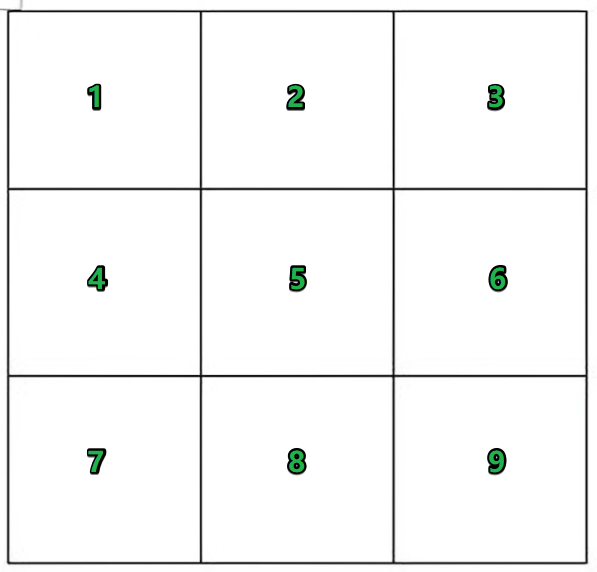
Critères de validation
En général, une plage d’erreur de ±0.5 mm pour les coordonnées des axes x/y/z suffit à satisfaire les exigences de précision du projet.
Cependant, pour les scénarios avec des exigences de haute précision, la plage d’erreur des coordonnées des axes x/y/z doit être encore plus petite, par exemple ±0.1 mm. Si la plage d’erreur obtenue à partir des statistiques est importante, veuillez améliorer la précision de reconnaissance du projet.