Conception de la solution de vision
Avant de déployer l’application, vous devez d’abord concevoir la solution de vision et sélectionner le modèle de caméra, le modèle d’IPC, le mode de montage de la caméra, le mode de communication du robot, etc., en fonction des besoins réels de votre projet. Une bonne conception aide à déployer rapidement une application robotique guidée par vision 3D.
Lors de la phase de conception d’une application robotique guidée par vision 3D, vous devez effectuer les étapes suivantes:
Sélectionner la caméra et les accessoires
La caméra 3D industrielle Mech-Eye est une caméra haute performance développée par Mech-Mind. Elle offre une grande précision, une acquisition de données rapide, une résistance à la lumière ambiante et une imagerie de haute qualité, et peut générer des données de nuage de points 3D de haute qualité pour une variété d’objets. Mech-Mind propose une gamme complète de modèles pour répondre aux besoins de résistance à la lumière ambiante, de haute précision, de grand champ de vision, de grande vitesse et de petite taille à différentes distances.
-
En pratique, sélectionnez le modèle approprié en fonction de la distance de travail, du champ de vision et de la précision de la caméra.
Pour sélectionner le modèle de caméra approprié, procédez comme suit:
-
Utilisez le Sélecteur de caméra 3D pour filtrer le(s) modèle(s) approprié(s) selon les dimensions de l’objet cible.
-
S’il existe plusieurs modèles répondant à vos exigences, sélectionnez le plus approprié selon Caractéristiques et applications adaptées. Veuillez contacter les ingénieurs avant-vente ou le service commercial de Mech-Mind pour obtenir de l’aide.
-
-
En plus de sélectionner un modèle de caméra, vous devez également choisir des accessoires optionnels selon les besoins réels du projet, tels que le module d’alimentation, le câble Ethernet de la caméra et la plaque de calibration. Pour plus de détails, consultez Sélection des accessoires de caméra.
Déterminer le mode de montage de la caméra
Il existe deux modes de montage courants pour la caméra: Eye to hand (ETH) et Eye in hand (EIH). Vous pouvez déterminer le mode en fonction de la position relative de la caméra par rapport au robot et des besoins en temps de cycle global. Pour les caractéristiques, les avantages et les exigences spécifiques des deux modes de montage, veuillez consulter Exigences de montage de la caméra, window=_blank.
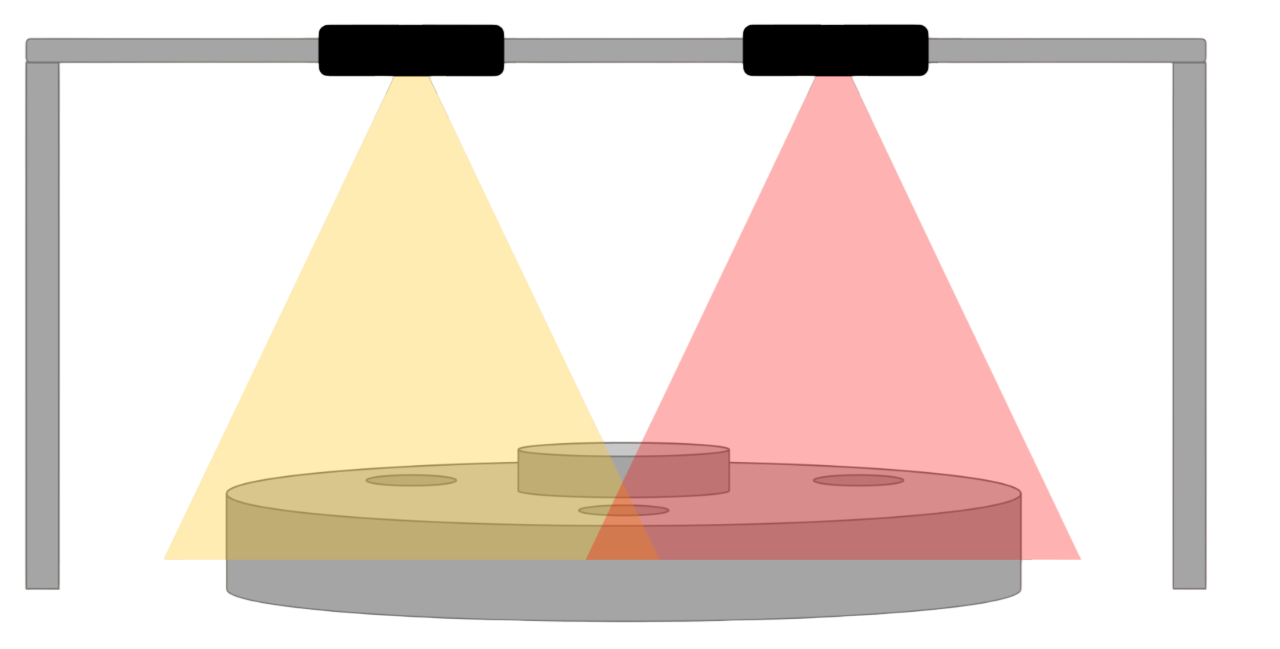
De plus, pour étendre le champ de vision de la caméra et améliorer la qualité du nuage de points superposé, un projet peut installer deux caméras ou plus sur une même station, ce que l’on appelle Eye to eye (ETE).
Quel que soit le mode de montage de la caméra choisi, vous aurez besoin d’un châssis de montage pour fixer la caméra. Pour la description de la conception du châssis de montage de la caméra, veuillez consulter Conception du châssis de montage de la caméra.
Sélectionner le modèle d’IPC
Les IPC Mech-Mind fournissent l’environnement d’exploitation standard pour les produits logiciels de Mech-Mind et peuvent donc maximiser les fonctionnalités et les performances du logiciel.
Veuillez sélectionner le modèle d’IPC approprié en fonction des scénarios d’application, paramètres techniques, et des spécifications techniques de performance des IPC. Les spécifications techniques de performance des IPC sont présentées dans le tableau ci-dessous.
| Spécification technique | Scénario d’application | Mech-Mind IPC STD | Mech-Mind IPC ADV | Mech-Mind IPC PRO |
|---|---|---|---|---|
Nombre de projets Mech-Vision pouvant être exécutés simultanément |
Scénarios utilisant la communication Interface/Adaptateur standard (sans l’étape de Planification de trajectoire) |
≤5 |
≤5 |
≤5 |
Scénarios utilisant la communication Interface/Adaptateur standard (avec l’étape de Planification de trajectoire) |
≤5 |
≤5 |
≤5 |
|
Scénarios utilisant la communication Master-Control (utilisant le logiciel Mech-Viz) |
≤5 |
≤5 |
≤5 |
|
Scénarios où la solution de vision 3D utilise l’appariement 3D pour la reconnaissance |
≤5 |
≤5 |
≤5 |
|
Scénarios où la solution de vision 3D utilise l’appariement 3D et l’apprentissage profond 2D pour la reconnaissance |
≤2 |
≤2 |
≤4 |
|
Nombre de caméras prises en charge par solution |
≤2 |
≤2 |
≤2 |
|
Nombre de modèles d’apprentissage profond pris en charge par solution |
≤5 (CPU) |
≤5 (GPU) |
<8 (GPU) |
|
Nombre de robots pris en charge par solution (communication Master-Control) |
1 |
1 |
1 |
|
Nombre de modes de communication pris en charge par solution |
1 |
1 |
1 |
|
Nombre de clients pouvant être connectés simultanément par solution (communication Interface/Adaptateur standard) |
≤4 |
≤4 |
≤4 |
|
Si vous utilisez votre propre ordinateur de bureau ou portable (« IPC non standard » en abrégé) comme ordinateur personnel industriel (IPC), veuillez consulter Configuration d’un IPC non standard pour vous assurer que l’IPC non standard répond aux exigences de configuration du système et pour effectuer les réglages correspondants.
Sélectionner le robot et la bride de robot
Des facteurs tels que la charge utile du robot, la zone d’atteinte du robot et le mode de communication doivent être pris en compte lors du choix d’un modèle de robot. Pour plus de détails, consultez Sélection du modèle de robot.
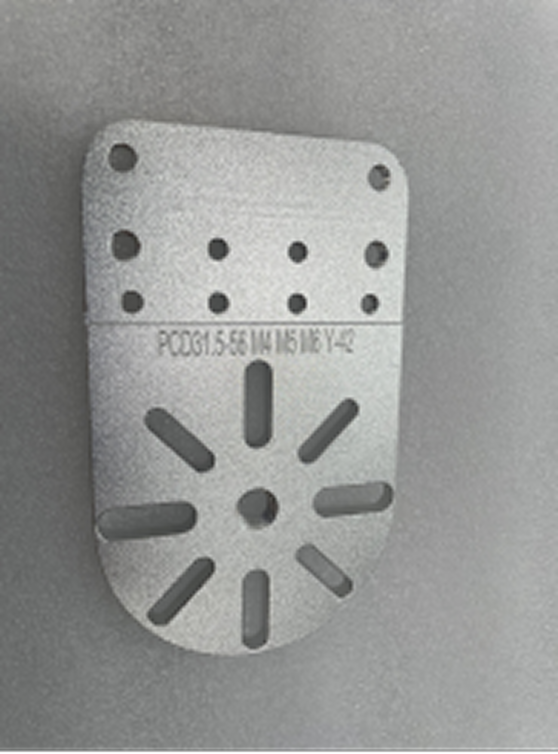
Une bride de robot est une interface standard montée sur la dernière articulation du bras du robot pour connecter divers outils ou dispositifs. Dans les applications robotiques guidées par vision 3D, afin de faciliter le montage de la plaque de calibration à l’extrémité du robot, Mech-Mind propose des brides de robot dans les modèles suivants. Sélectionnez l’adaptateur de bride approprié sur la base des dimensions réelles de la bride du robot.
| Image | Modèle | Dimensions (mm) |
|---|---|---|
|
RF-S: Bride de robot (petite) |
106 x 64 x 5 |
|
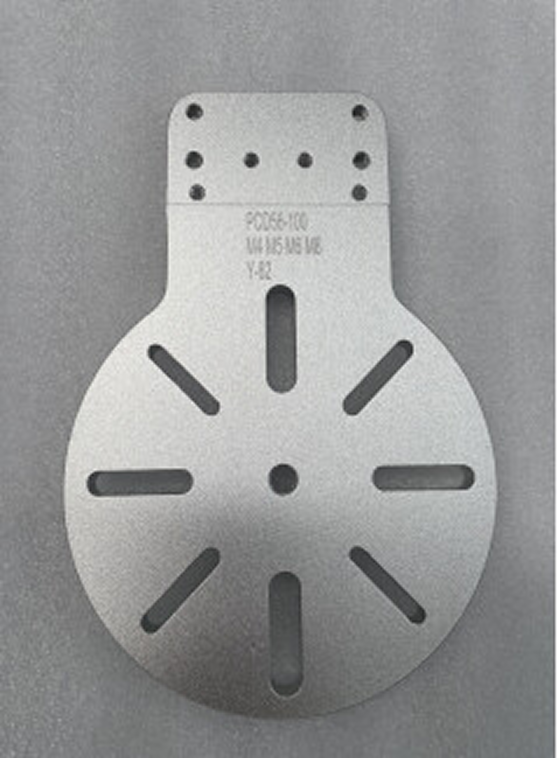
RF-M: Bride de robot (moyenne) |
174 x 120 x 8 |

|
RF-L: Bride de robot (grande) |
296 x 240 x 8 |
Sélectionner le mode de communication du robot
Le mode de communication par interface convient généralement aux applications pratiques sur la ligne de production, offrant des fonctionnalités plus flexibles ainsi qu’un temps de cycle plus court. Le mode de communication Master-Control est généralement appliqué dans la phase de test d’un projet pour une vérification rapide de l’efficacité de prélèvement.
| Si vous choisissez d’utiliser le mode de communication par interface et avez besoin de utiliser Mech-Viz pour obtenir la trajectoire planifiée, vous devez obtenir l’autorisation pour le logiciel Mech-Viz. |
Pour plus d’informations sur la manière de sélectionner le mode de communication, veuillez consulter la section Sélection du mode de communication. Pour plus d’informations sur les modes de communication, veuillez consulter la section Notions de base sur la communication.
Déterminer s’il faut utiliser l’apprentissage profond
Veuillez consulter la section Sélectionner une solution d’apprentissage profond pour déterminer s’il faut utiliser l’apprentissage profond dans votre solution de vision.
| Si la solution de vision doit utiliser l’apprentissage profond pour assister la reconnaissance, vous devez obtenir l’autorisation pour le logiciel Mech-DLK. |
L’appariement 3D peut ne pas résoudre efficacement les problèmes suivants lors du processus de reconnaissance visuelle. Dans ce cas, vous devez utiliser l’apprentissage profond:
| N° | Défis pour les méthodes traditionnelles | Illustration |
|---|---|---|
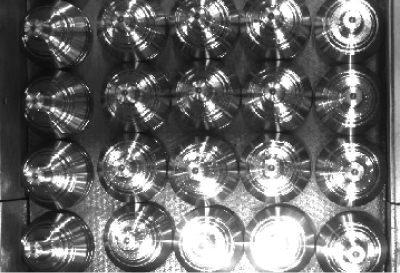
1 |
Les surfaces des objets sont très réfléchissantes, et la qualité du nuage de points est médiocre. |
|
2 |
Les caractéristiques géométriques sur le nuage de points de l’objet cible sont peu nombreuses, et le nombre de points caractéristiques dans le nuage de points est réduit. |
|
3 |
Lorsque les objets cibles sont soigneusement rangés et étroitement ajustés, il est difficile d’identifier les nuages de points des objets individuels, ou ceux-ci peuvent être mal identifiés. |
|
4 |
La caractéristique de l’objet n’est visible que dans l’image couleur et n’est pas visible dans le nuage de points. |
|
5 |
Le projet impose une exigence élevée sur le temps de cycle de la vision. Lorsque le nombre d’objets est important, le temps d’appariement avec le modèle de nuage de points peut être long. En utilisant l’apprentissage profond pour d’abord filtrer un lot d’objets cibles puis effectuer l’appariement, le temps nécessaire à l’appariement peut être raccourci. |
|




Préciser les exigences de précision du projet
Avant de déployer réellement une solution de vision, vous devez confirmer les exigences de précision de votre projet (par exemple, ±3 mm) et déterminer les attentes et objectifs de précision de votre application. Normalement, une précision de prélèvement de ±3–5 mm peut répondre aux exigences des projets courants.
Pour les scénarios avec des exigences de précision plus élevées (telles que ±1 mm), il est recommandé de déployer la solution Correction automatique de la dérive du système de vision. Elle réduit non seulement les erreurs de précision causées par la dérive de température de la caméra, mais garantit également la fiabilité et la stabilité opérationnelle du système de vision 3D.
Confirmer le type de licence logicielle et les produits et fonctionnalités à autoriser
Mech-Mind utilise Sentinel LDK comme système de licence pour ses produits logiciels. Ce système de licence prend en charge deux méthodes de chiffrement: Dispositif de licence logicielle et Code de licence logicielle. Veuillez contacter Mech-Mind pour confirmer le formulaire d’autorisation requis (méthode de chiffrement).
Pour garantir que la solution de vision peut fonctionner normalement, le Dispositif de licence logicielle ou le Code de licence logicielle doit contenir l’autorisation pour les produits ou fonctionnalités correspondants.
| Autorisation de produit/fonctionnalité | Description |
|---|---|
Mech-Vision 2.0+ |
Autorisation de produit obligatoire. Cette autorisation est requise lorsque vous exécutez Mech-Vision 2.0+. |
Mech-Viz 2.0+ |
Autorisation de produit optionnelle. Si vous choisissez d’utiliser le mode de communication par interface et souhaitez utiliser Mech-Viz pour obtenir la trajectoire planifiée, vous devez obtenir cette autorisation. |
Déterminer les exigences de l’environnement de travail
Lors de la conception d’une solution de vision, il est crucial de s’assurer que les composants fonctionnent dans des conditions environnementales appropriées. Cela affecte non seulement les performances du système, mais influe aussi directement sur la durée de vie et la fiabilité du matériel.
Avant d’installer et d’utiliser le système de vision, vérifiez soigneusement les exigences spécifiques du matériel du système de vision pour les conditions environnementales, y compris, sans s’y limiter, les aspects suivants:
-
Température ambiante
Vérifiez la plage de température de fonctionnement du matériel (principalement les caméras et les IPC) afin de vous assurer qu’ils peuvent fonctionner normalement dans la plage de température ambiante. Si nécessaire, des climatiseurs, des chauffages ou une isolation peuvent être utilisés pour ajuster la température ambiante.
Pour la plage de température de fonctionnement de la caméra, veuillez consulter Spécifications techniques de la caméra. Pour la plage de température de fonctionnement de l’IPC, consultez Spécifications techniques de l’IPC.
-
Humidité ambiante
Vérifiez la plage d’humidité de fonctionnement du matériel (principalement les caméras et les IPC). Des mesures doivent être prises pour éviter la condensation, la corrosion ou les courts-circuits causés par une forte humidité.
Pour la plage d’humidité de fonctionnement de la caméra, veuillez consulter Spécifications techniques de la caméra. Pour la plage d’humidité de fonctionnement de l’IPC, veuillez consulter Spécifications techniques de l’IPC.
-
Tolérance aux vibrations
La résistance aux vibrations et aux chocs des caméras 3D fournies par Mech-Mind respecte cette norme. Pour des informations spécifiques sur la tolérance aux vibrations et aux chocs de la caméra, consultez Spécifications techniques de la caméra.
Assurez-vous que l’intensité des vibrations de l’environnement de fonctionnement du système de vision ne dépasse pas les exigences des normes ci-dessus. Si la caméra subit de manière continue des vibrations dépassant cette plage, ses performances peuvent se dégrader. Des vibrations dépassant largement cette plage peuvent entraîner des dommages à la caméra ou des arrêts de la ligne de production. Mech-Mind ne saurait être tenue responsable de telles circonstances.
-
Protection contre la poussière et les polluants
Les caméras Mech-Mind présentent un indice de protection élevé et peuvent empêcher efficacement la poussière ou les particules de pénétrer dans l’équipement.
Pour garantir la qualité de l’image, vous devez nettoyer régulièrement le corps et les fenêtres de la caméra.
-
Protection contre les interférences électromagnétiques (EMI)
Assurez-vous que l’équipement est installé à distance des sources d’interférences électromagnétiques fortes (telles que les gros moteurs, les dispositifs de communication sans fil, etc.) afin d’éviter des problèmes tels que la perte d’images, l’absence de cartes de profondeur et autres anomalies d’acquisition de données.