Robot Selection
This section describes how to select a robot model.
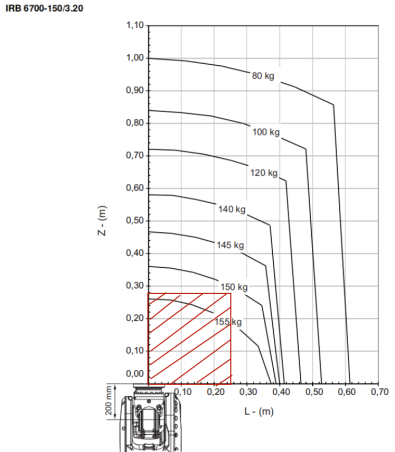
Verify Robot Payload
When verifying the payload of the robot, the weights of the end tool, the target object, and the pipeline should be considered comprehensively, and the correlation between the center of gravity and torque of the robot J6 flange should comply with the diagram of the payload.
Reachable Range of the Robot in the Work Area
There are many ways to check the reachable range of the robot, such as: Mech-Viz, CAD, robcad, and RobotStudio.
As shown in the following image, you can use Mech-Viz to view the reachable range.
Communication Mode Selection
The selected robot model needs to be able to communicate properly with the vision system.
-
If you use the Standard Interface communication, you need to confirm that the selected robot brand and model support Standard Interface communication with the vision system, and that the robot controller meets the software and hardware requirements. For more information, see Standard Interface Communication .
-
If you use the Master-Control communication, you need to confirm that the selected robot brand and model support Master-Control communication with the vision system, and that the robot controller meets the software and hardware requirements. For more information, see Master Communication .
Robot Degrees of Freedom Verification
During model selection, the robot’s degrees of freedom should be specified to ensure the robot can fulfill the motion requirements for the picking task.
Most industrial robots have 4 to 7 degrees of freedom, with 6 being the most common. A higher number of degrees of freedom enhances the robot’s reachability and flexibility in complex environments.
When selecting the robot’s degrees of freedom, the following factors should be considered:
-
Task complexity: Whether the task requires simultaneous adjustment of position and pose.
-
Workspace constraints: Whether the workspace is confined, which may require a higher number of degrees of freedom for flexible motion.
-
Picking pose requirements: Whether a specific tool pose should be maintained during picking.
-
Mounting method: Whether the robot will be floor-mounted, ceiling-mounted, or wall-mounted, as this influences the required degrees of freedom.
It is recommended to comprehensively evaluate the necessary degrees of freedom based on these factors to ensure the robot can successfully perform picking.