Configuration de la communication du robot
Dans ce tutoriel, vous apprendrez à charger les fichiers du programme Interface Standard sur le robot FANUC, et à configurer la communication via l’Interface Standard entre le système de vision Mech-Mind et le robot.
|
Préparation avant le chargement
Vérifier les versions matérielles et logicielles
-
Version du logiciel du système du contrôleur : V7.5, 7.7, 8.x ou 9.x.
Cliquez ici pour les instructions
-
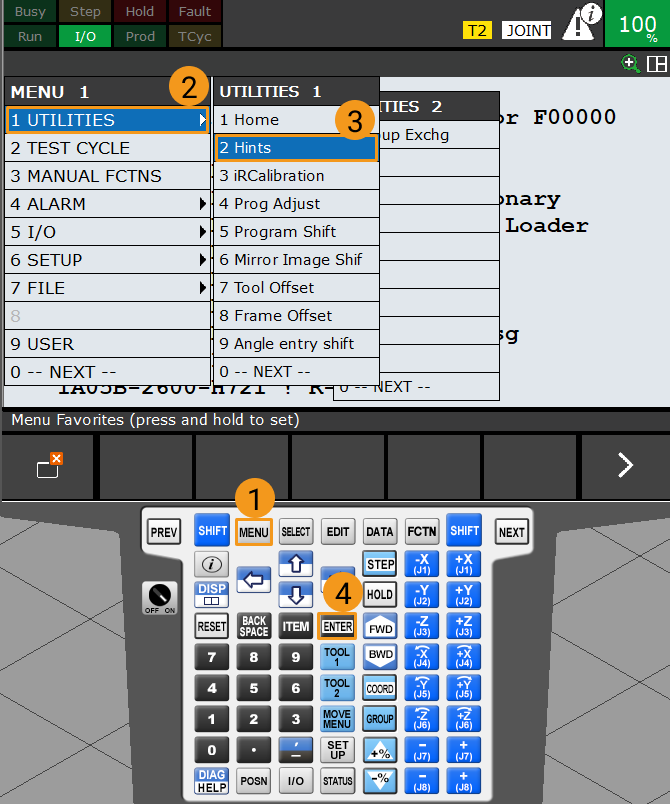
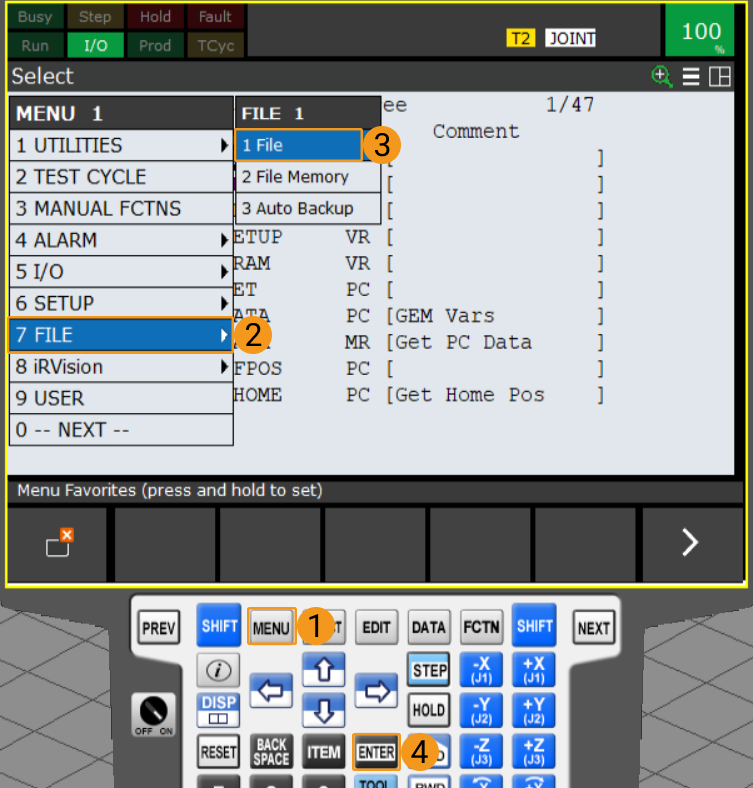
Appuyez sur la touche MENU du boîtier d’enseignement, sélectionnez à l’aide des touches fléchées, puis appuyez sur ENTER.
-
Dans l’interface UTILITIES Hints, vérifiez la version du logiciel du contrôleur dans la section sélectionnée.

-
-
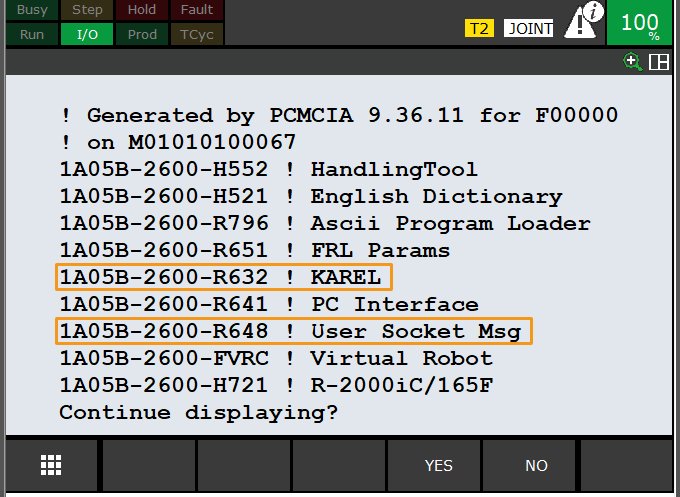
Confirmez que le robot FANUC a installé les paquets logiciels requis :
-
One of R651 or R632 (KAREL)
-
R648 (User Socket Msg)
Cliquez ici pour les instructions
-
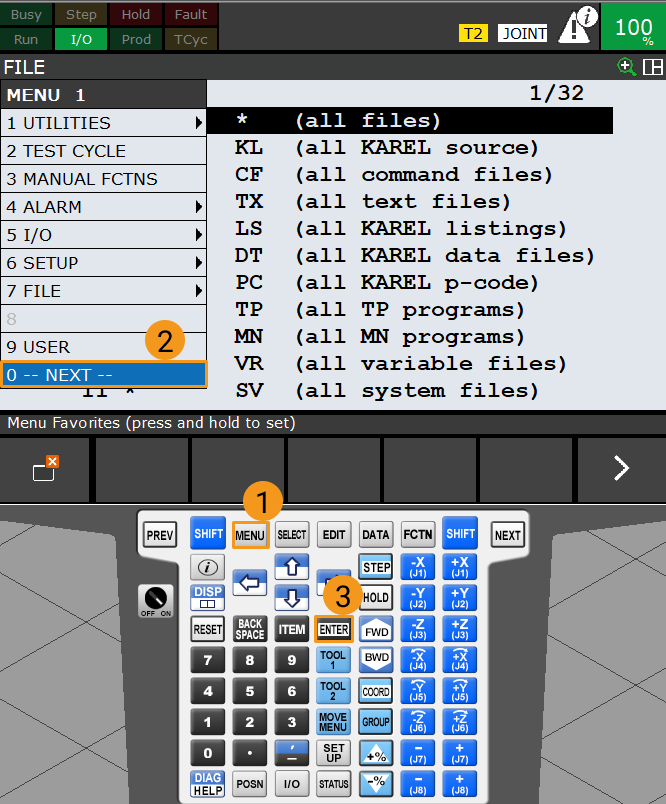
Appuyez sur la touche MENU du boîtier d’enseignement, sélectionnez SUIVANT à l’aide des touches fléchées, puis appuyez sur ENTER.
-
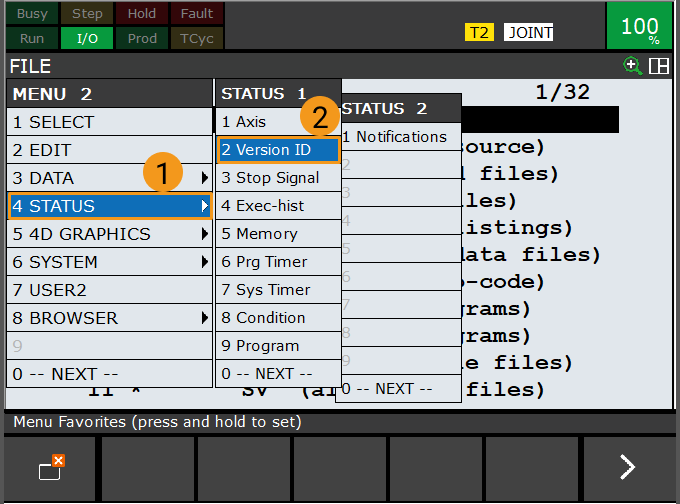
Sélectionnez à l’aide des touches fléchées, puis appuyez sur ENTER.
-
Appuyez sur NEXT, puis sur F3 (c.-à-d., sélectionner ORDER FI).

-
Assurez-vous que les paquets logiciels requis sont installés, comme indiqué sur la figure.
-
Configurer la connexion réseau
Connecter le matériel
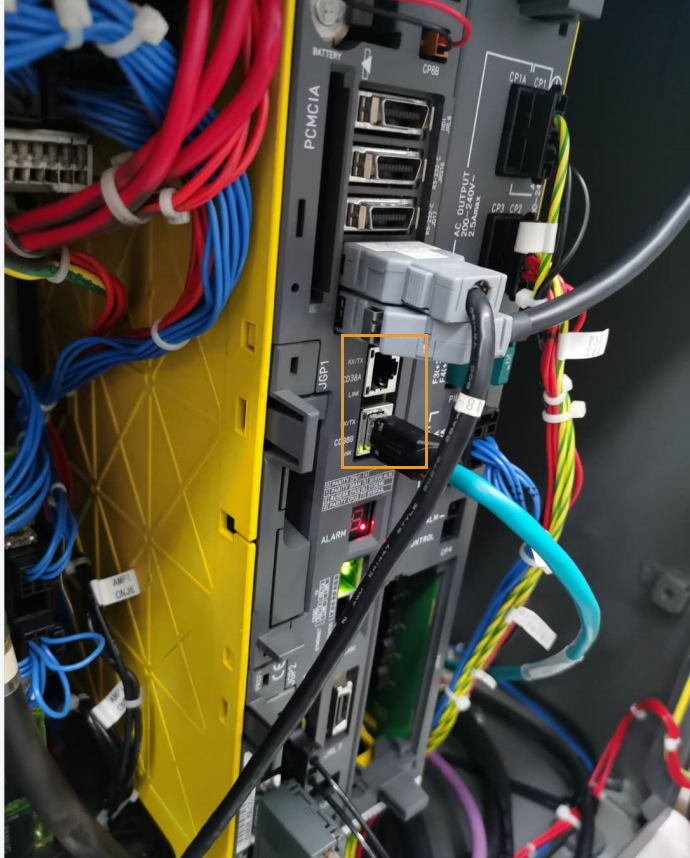
Branchez le câble Ethernet de l’IPC sur le port Ethernet du contrôleur du robot comme illustré. Vous pouvez brancher le câble sur le port CD38A ou CD38B. CD38A correspond au Port 1 dans le paramètre IP du robot, tandis que CD38B correspond au Port 2.
Configurer les adresses IP
-
Appuyez sur MENU sur le boîtier d’enseignement. Sélectionnez à l’aide des touches fléchées. Appuyez sur ENTER pour ouvrir l’interface SETUP Protocols.

-
Sélectionnez TCP/IP et appuyez sur F3 (c.-à-d., sélectionner DÉTAIL) pour ouvrir l’interface SETUP Host Comm.

-
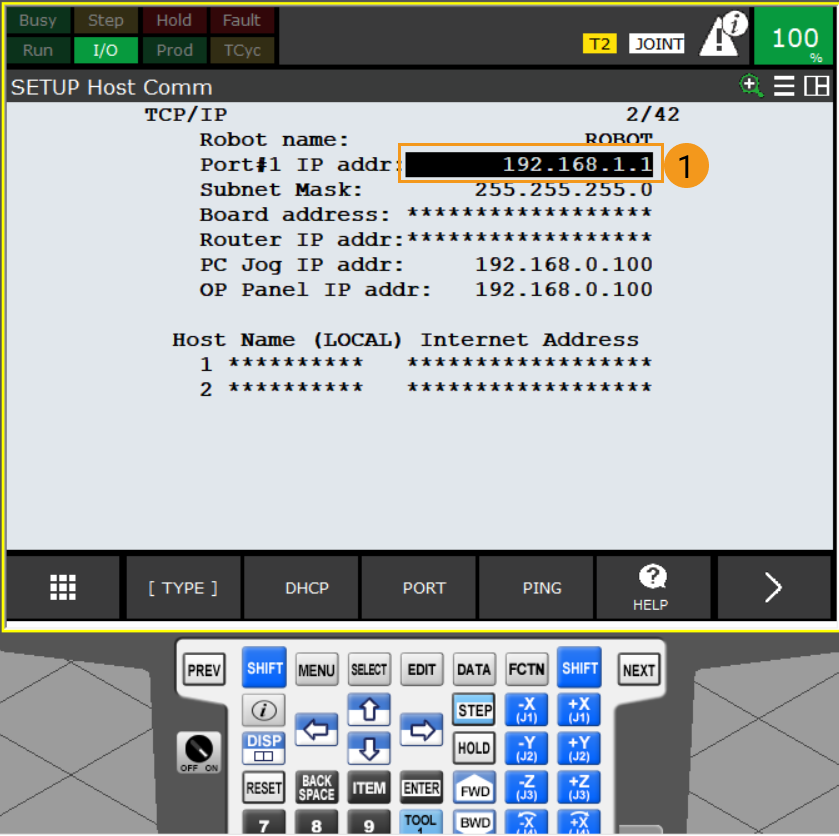
Si le câble Ethernet est connecté au port CD38A (Port 1), sélectionnez la ligne Adresse IP à l’aide des touches fléchées, et appuyez sur ENTER. Saisissez l’adresse IP à l’aide du clavier du boîtier d’enseignement, puis appuyez sur ENTER pour terminer. Notez que l’adresse IP du robot doit se trouver dans le même sous-réseau que celle de l’IPC, et que les deux adresses IP doivent être différentes.

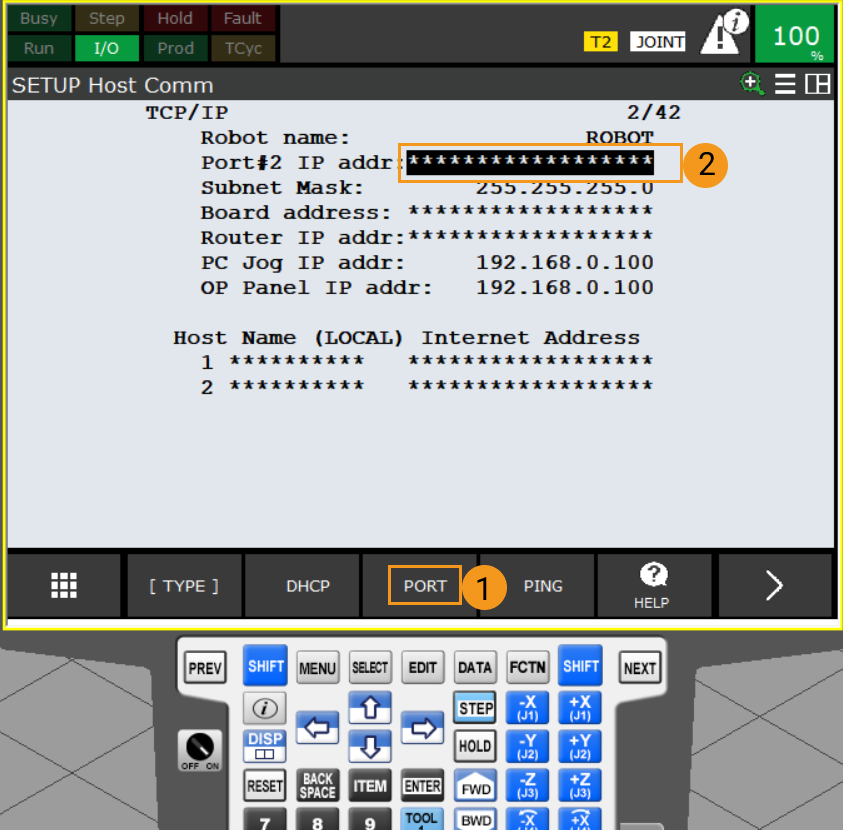
Si le câble Ethernet est connecté au port CD38B (Port 2), appuyez sur F3 (c.-à-d. sélectionner PORT) pour basculer vers le Port 2. Sélectionnez la ligne Adresse IP à l’aide des touches fléchées, et appuyez sur ENTER. Saisissez l’adresse IP à l’aide du clavier du boîtier d’enseignement, puis appuyez sur ENTER pour terminer. Notez que l’adresse IP du robot doit se trouver dans le même sous-réseau que celle de l’IPC, et que les deux adresses IP doivent être différentes.
Créer un projet Mech-Vision et l’enregistrer
-
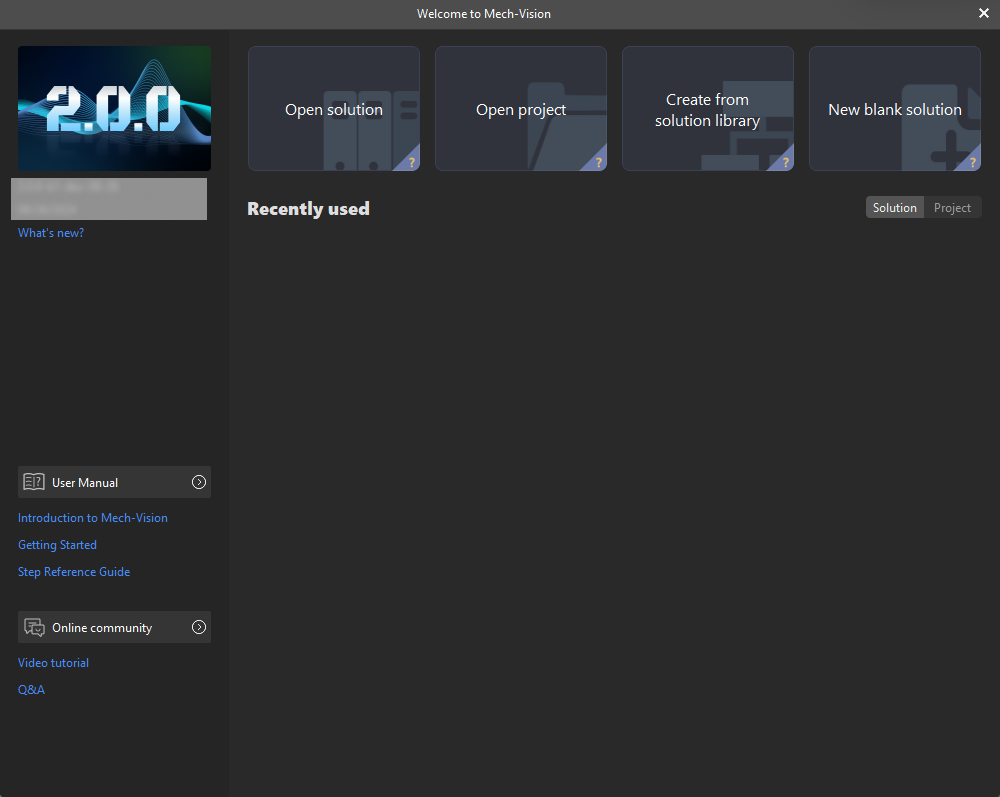
Ouvrez Mech-Vision. Si l’interface de bienvenue présentée ci-dessous s’affiche, cela indique que Mech-Vision a démarré avec succès.
-
Dans l’interface de bienvenue de Mech-Vision, cliquez sur Créer à partir de la bibliothèque de solutions pour ouvrir la Bibliothèque de solutions.

La Bibliothèque de solutions est une bibliothèque de ressources qui fournit des solutions ou des projets typiques (avec des données d’exemple) provenant de divers scénarios d’application. -
Dans l’onglet Modèle d’application de la Bibliothèque de solutions, sélectionnez la solution Loading Randomly Stacked Target Objects, comme illustré ci-dessous.
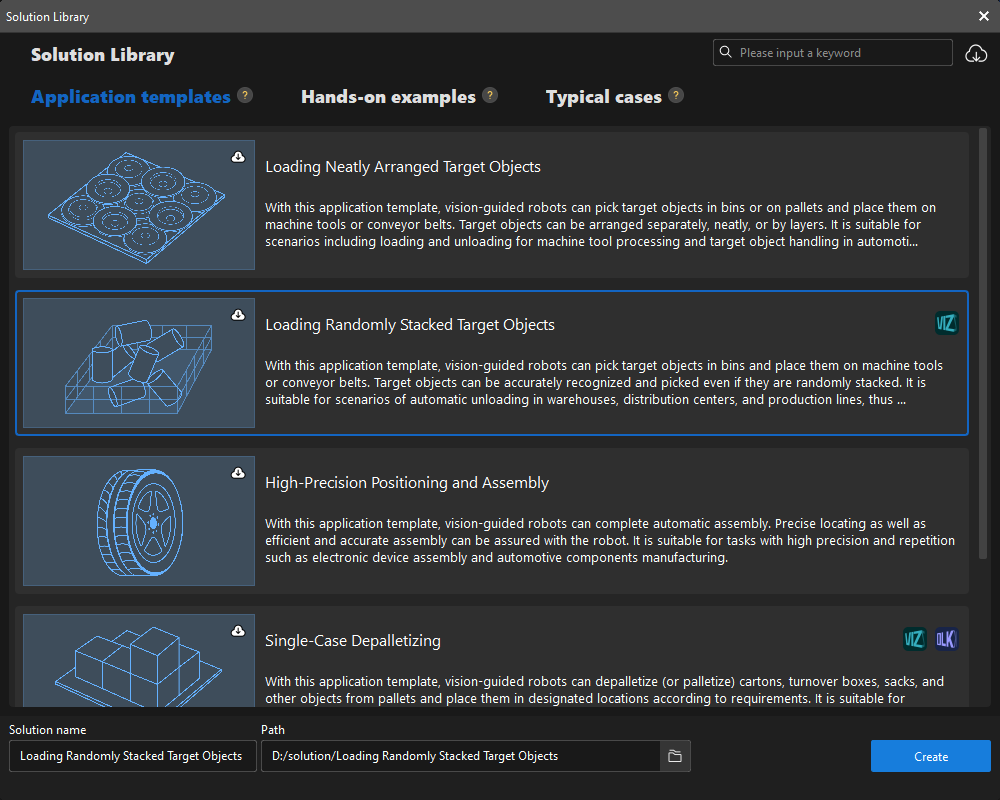
Si vous ne trouvez pas la solution Loading Randomly Stacked Target Objects dans la Bibliothèque de solutions, cliquez sur l’icône Télécharger dans l’angle supérieur droit.
-
Définissez le nom et le chemin de la solution, puis cliquez sur Créer.
Après la création du projet, la solution et le projet créés s’affichent dans la liste des projets dans le coin supérieur gauche de l’interface principale de Mech-Vision.
-
Une solution est un ensemble de configurations et de données liées aux robots et à la communication avec les robots, au traitement de vision, à la planification de trajectoire, etc., nécessaires pour l’application de vision industrielle.
-
Un projet est un flux de travail de traitement de vision dans la solution. Normalement, une solution ne contient qu’un seul projet Mech-Vision, mais elle peut en contenir plusieurs dans des scénarios d’application complexes.
-
La solution Loading Randomly Stacked Target Objects ne contient qu’un seul projet “Vis_Target_Object_Recognition”.
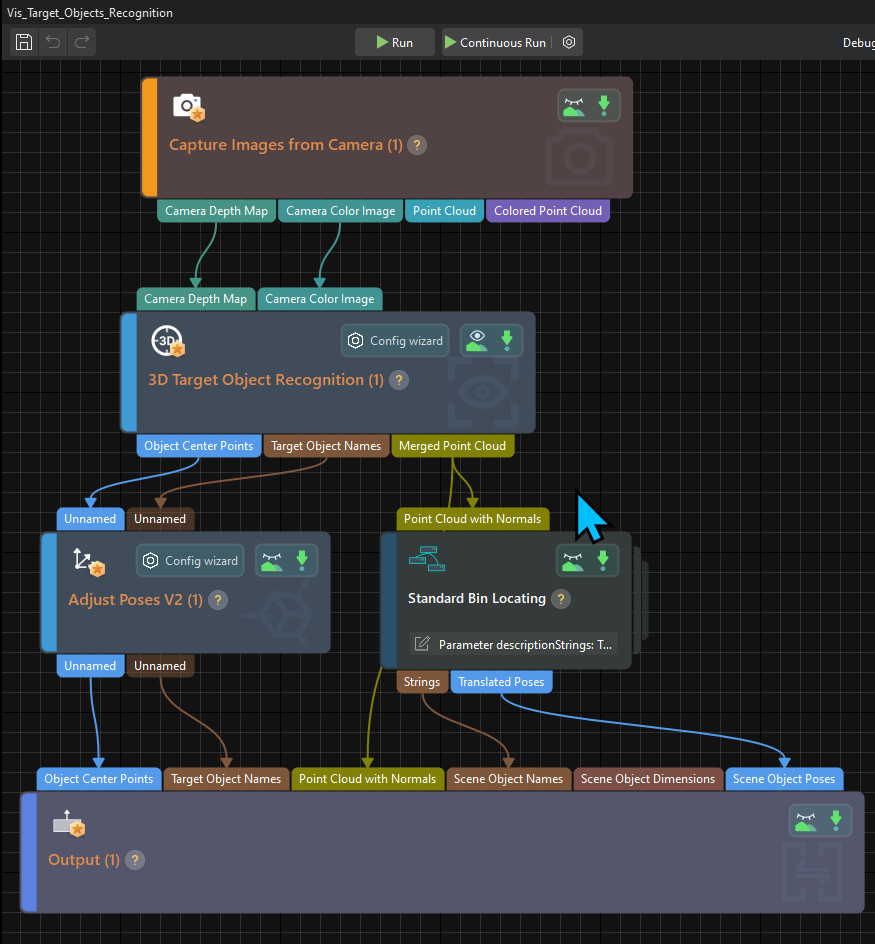
Dans l’Espace de programmation graphique de l’interface principale, le flux de travail du projet “Vis_Target_Object_Recognition” est affiché.
-
-
Dans la liste des projets, cliquez avec le bouton droit sur la solution, puis sélectionnez Chargement automatique de la solution.
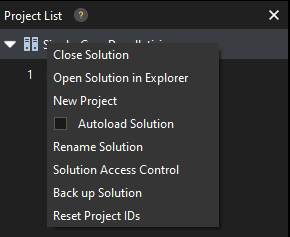
Une fois le chargement automatique défini pour cette solution, le nom du projet s’affiche en vert et l’ID du projet s’affiche à gauche du nom du projet.
L’ID du projet sera utilisé par le programme de prise et de dépose du robot pour déclencher l’exécution du projet Mech-Vision. -
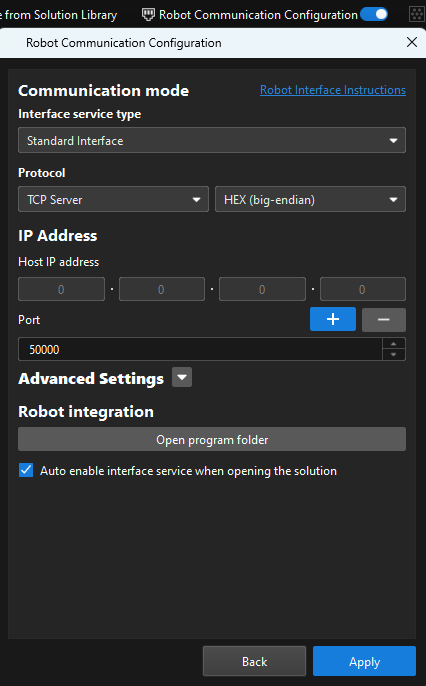
Dans la barre de menus, sélectionnez .
Configurer la configuration de communication du robot
Cet exemple configure déjà par défaut la communication du robot pour le robot FANUC (FANUC_LR_MATE_200ID). L’option Configuration de la communication du robot dans la barre d’outils est activée.
Sauvegarder les fichiers de programme du robot
-
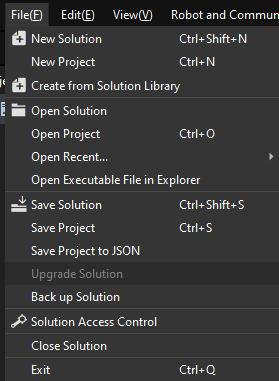
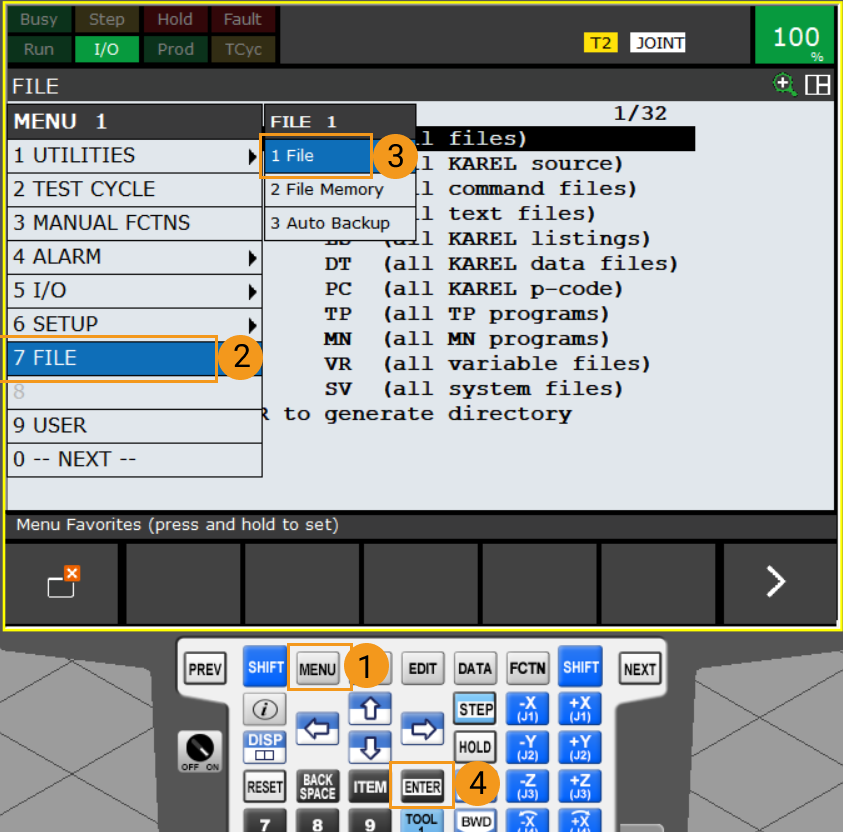
Insérez la clé USB, puis appuyez sur MENU. Sélectionnez à l’aide des touches fléchées. Ensuite, appuyez sur ENTER pour ouvrir l’interface FILE.
-
Veuillez vous assurer que votre clé USB ne dépasse pas 32 Go et que son système de fichiers est FAT32.
-
Vous pouvez connecter la clé USB au contrôleur du robot ou au boîtier d’enseignement selon les besoins.
-
-
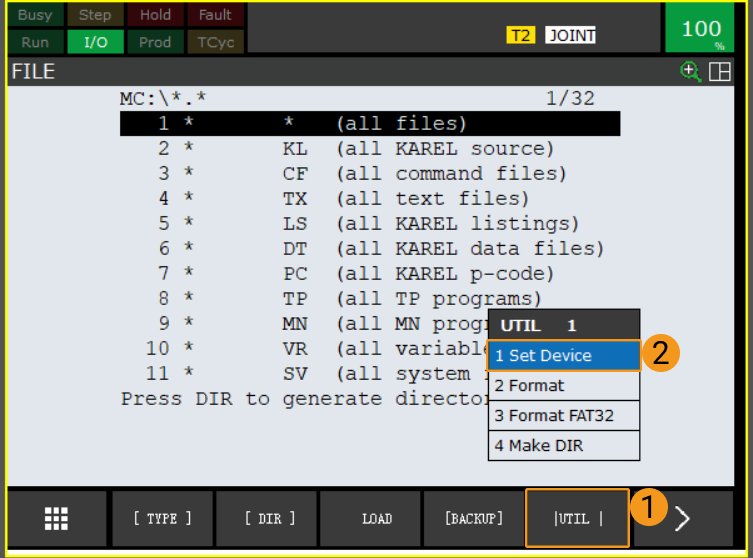
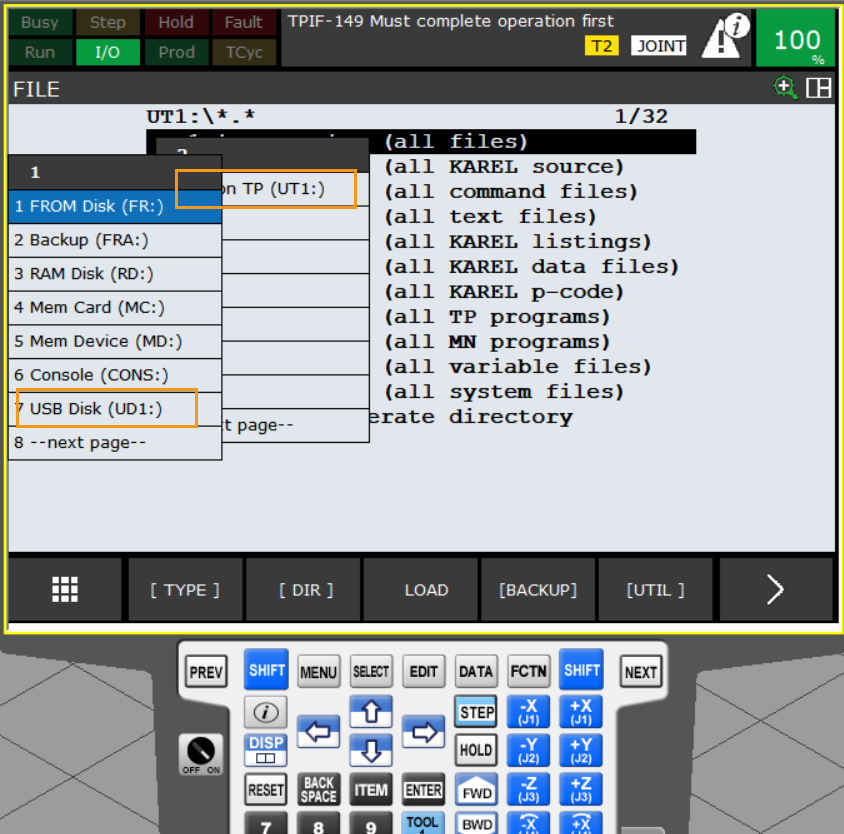
Dans l’interface FILE, appuyez sur F5 (c.-à-d., sélectionner UTIL). Sélectionnez Définir le périphérique à l’aide des touches fléchées, puis appuyez sur ENTER.
-
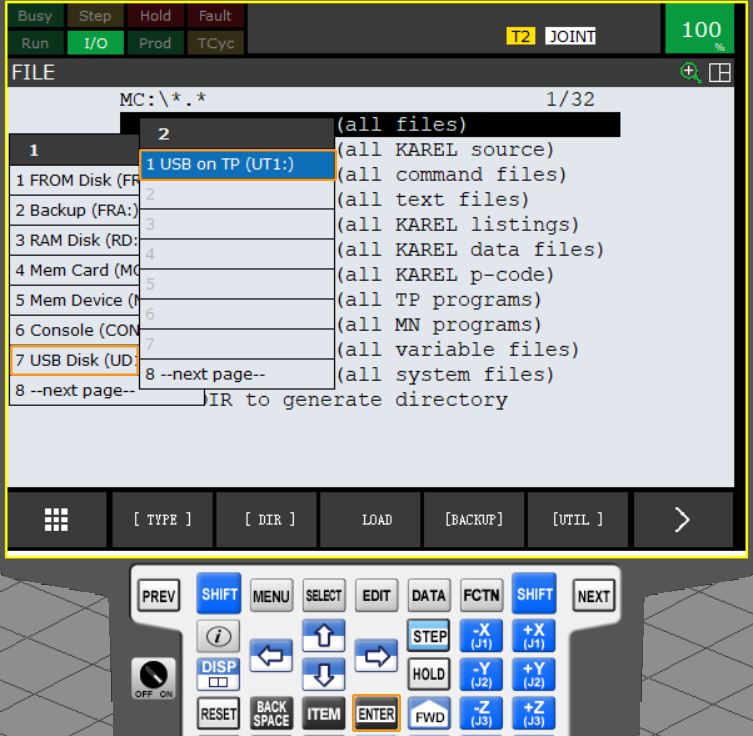
Si votre clé USB est connectée au contrôleur, sélectionnez Disque USB (UD1:) à l’aide des touches fléchées, puis appuyez sur ENTER. Si votre clé USB est connectée au boîtier d’enseignement, sélectionnez USB sur TP (UT1:) à l’aide des touches fléchées, puis appuyez sur ENTER.
-
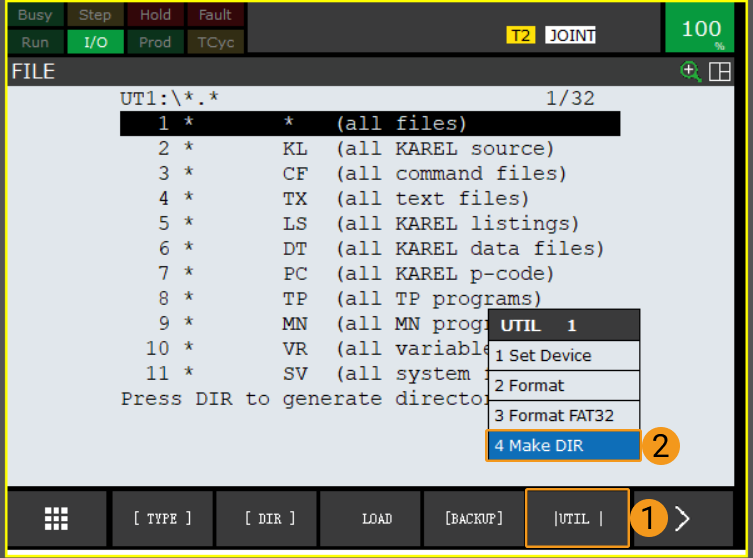
Dans l’interface FILE, appuyez sur F5 (c.-à-d., sélectionner UTIL). Sélectionnez Créer DIR à l’aide des touches fléchées, puis appuyez sur ENTER.
-
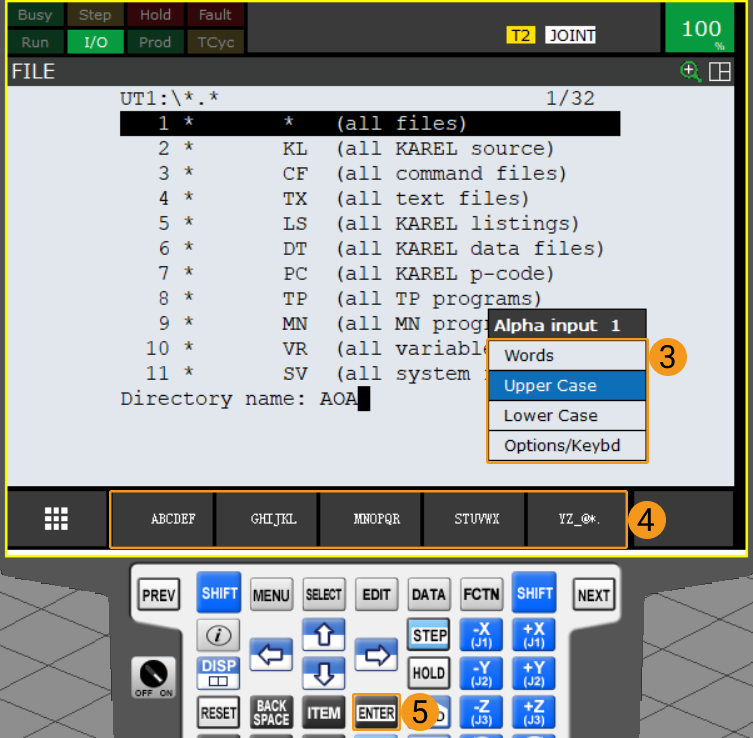
Sélectionnez Mots, Majuscules, Minuscules ou Options/Clavier et utilisez les touches F1~F5 pour nommer le dossier, par exemple AOA. Ensuite, appuyez sur ENTER pour confirmer et entrer dans le nouveau dossier.
-
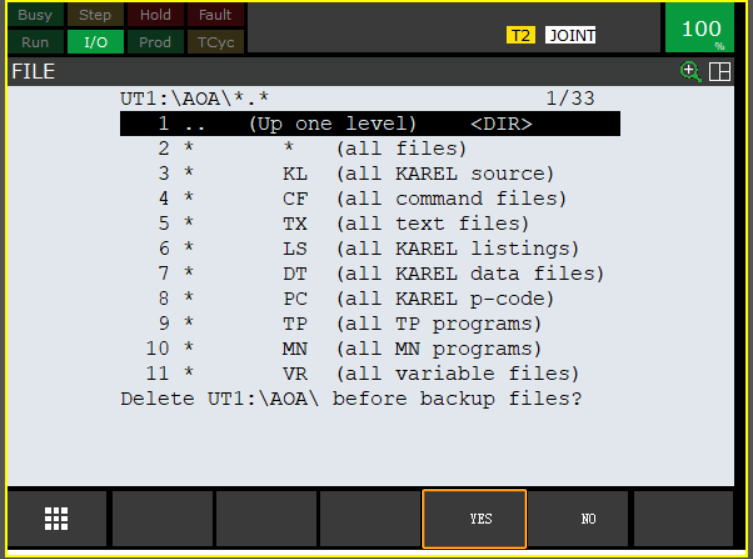
Appuyez sur F4 (c.-à-d., sélectionner SAUVEGARDE). Sélectionnez Tous les éléments ci-dessus à l’aide des touches fléchées, puis appuyez sur ENTER pour sauvegarder les fichiers.

-
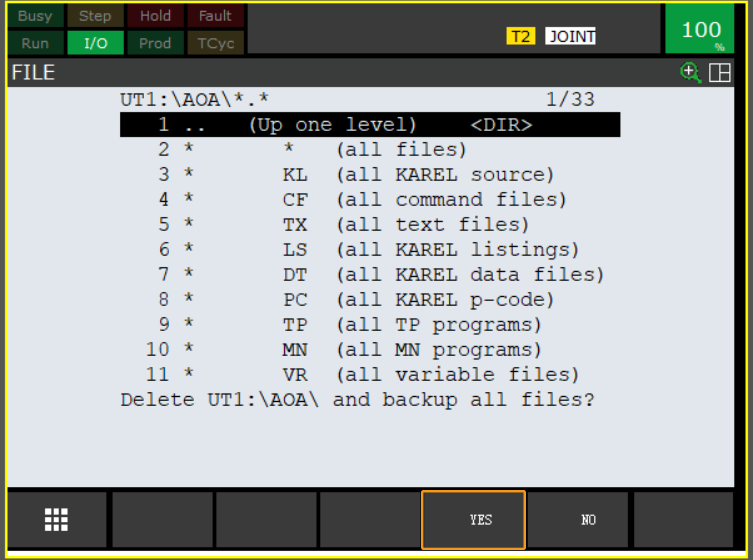
Un message demandant s’il faut supprimer le nouveau dossier avant de sauvegarder les fichiers s’affiche à l’écran. Appuyez sur F4 pour sélectionner OUI. Ensuite, un message demandant s’il faut sauvegarder tous les fichiers s’affiche. Appuyez sur F4 pour sélectionner OUI.
-
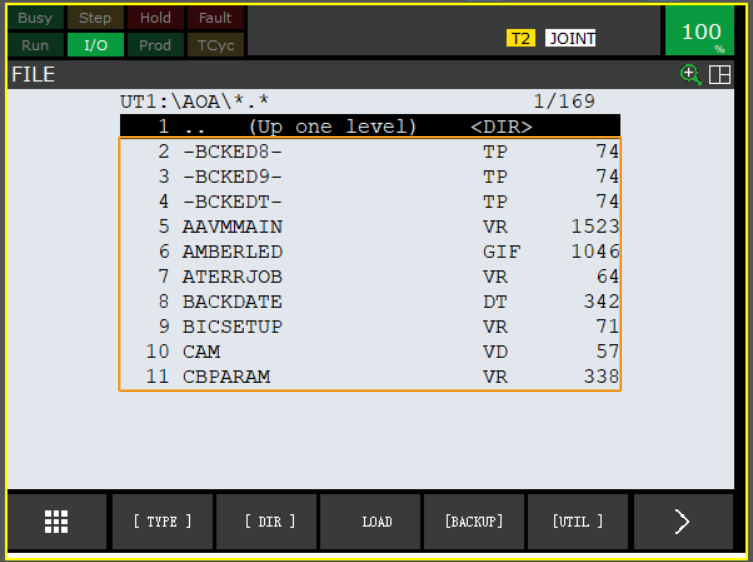
Une fois la sauvegarde terminée, sélectionnez tous les fichiers à l’aide des touches fléchées, puis appuyez sur ENTER pour afficher tous les fichiers de sauvegarde.

Préparer les fichiers de programme
Accédez à Communication Component/Robot_Interface depuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez tout le contenu du dossier FANUC vers le répertoire racine de votre clé USB.
|
Charger les fichiers de programme dans le robot
-
Insérez la clé USB, puis appuyez sur MENU. Sélectionnez à l’aide des touches fléchées. Ensuite, appuyez sur ENTER pour ouvrir l’interface FILE.
Vous pouvez connecter la clé USB au contrôleur du robot ou au boîtier d’enseignement selon les besoins.
-
Appuyez sur F5 (c.-à-d., sélectionner UTIL). Sélectionnez Définir le périphérique à l’aide des touches fléchées, puis appuyez sur ENTER.

-
Si votre clé USB est connectée au contrôleur, sélectionnez Disque USB (UD1:) à l’aide des touches fléchées, puis appuyez sur ENTER. Si votre clé USB est connectée au boîtier d’enseignement, sélectionnez USB sur TP (UT1:) à l’aide des touches fléchées, puis appuyez sur ENTER.
-
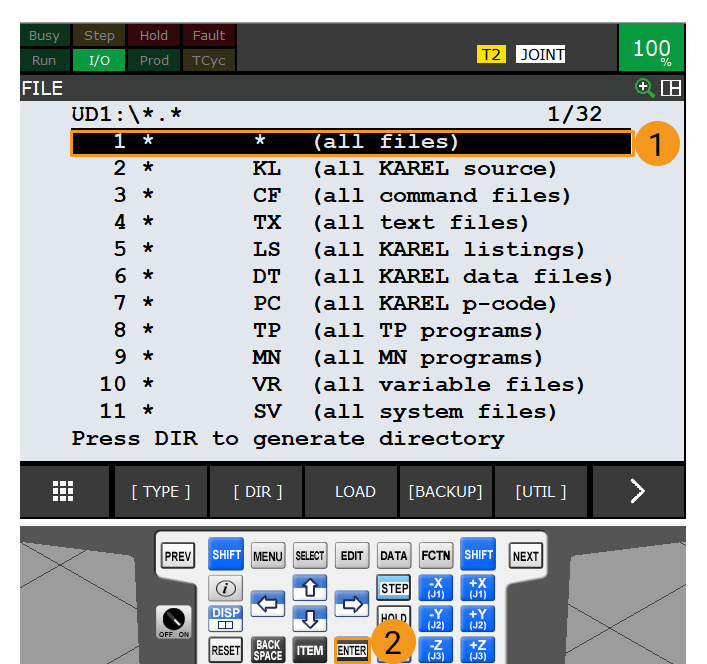
Sélectionnez tous les fichiers à l’aide des touches fléchées, puis appuyez sur ENTER pour afficher le répertoire racine de la clé USB.
-
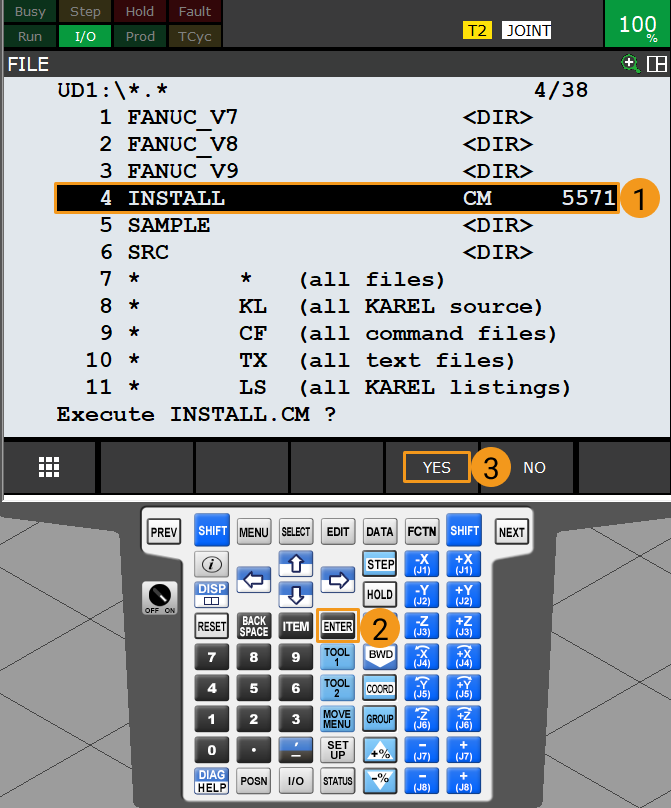
Dans le répertoire racine de la clé USB, sélectionnez INSTALLER à l’aide des touches fléchées. Appuyez sur ENTER, puis appuyez sur F4 (c.-à-d., sélectionner OUI) pour commencer le chargement des programmes.
-
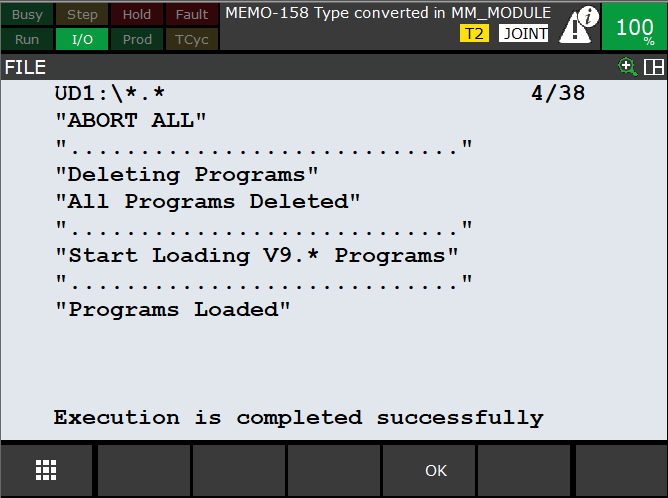
Lorsque le message Programs Loaded s’affiche, les fichiers de programme sont chargés. Appuyez sur F4 (c.-à-d., sélectionner OK) pour revenir à l’interface précédente.
Tester la communication via l’interface standard
Sélectionner et modifier le programme utilisé pour le test de communication
-
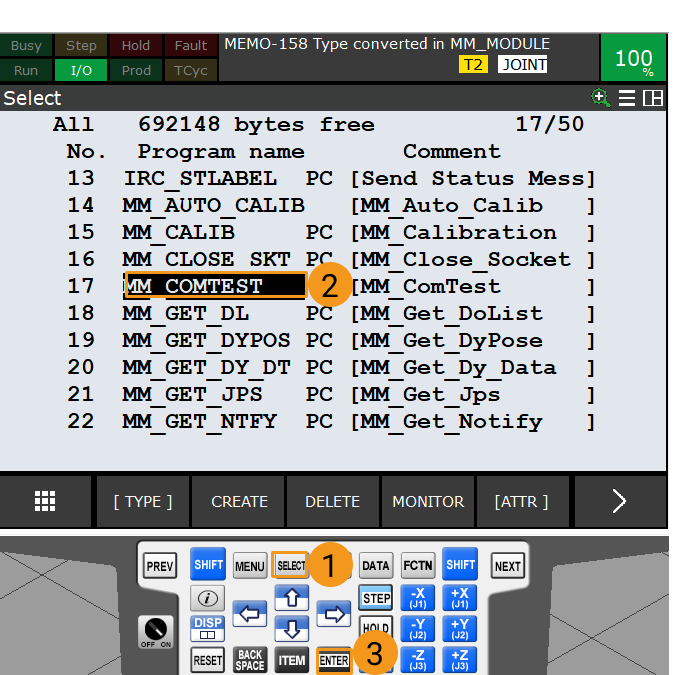
Après avoir chargé les fichiers de programme, appuyez sur SELECT sur le boîtier d’enseignement pour accéder à l’interface de sélection des programmes. Sélectionnez MM_COMTEST à l’aide des touches fléchées, puis appuyez sur ENTER pour démarrer le programme.
-
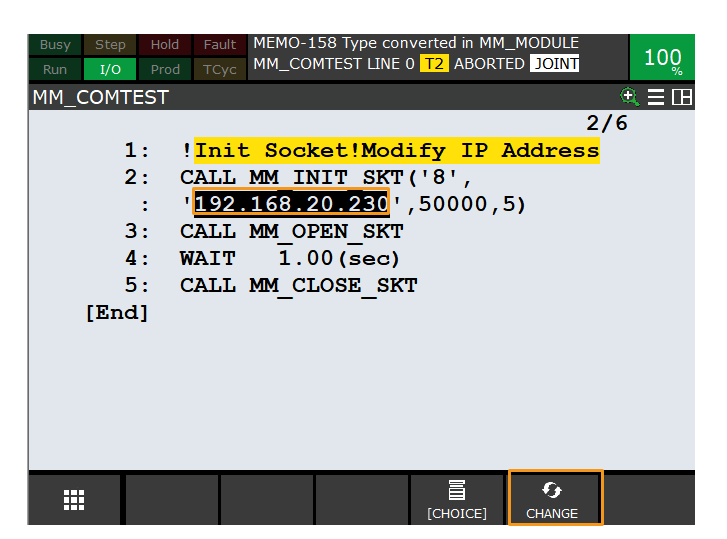
Dans l’interface MM_COMTEST, paramétrez la fonction MM_COMTEST. Cette fonction comporte quatre paramètres. Sélectionnez l’un des paramètres à l’aide des touches fléchées, appuyez sur F5 pour sélectionner MODIFIER, puis modifiez la valeur selon les besoins.
-
Paramètre 1 : numéro de port client (1-8)
-
Paramètre 2 : adresse IP de l’IPC
-
Paramètre 3 : numéro de port de l’IPC (serveur), identique au paramétrage dans Mech-Vision
-
Paramètre 4 : délai d’expiration (min)
-
Exécuter le programme et tester la connexion
-
Tournez l’interrupteur sur le boîtier d’enseignement sur ON et réglez l’interrupteur du contrôleur sur T1.
-
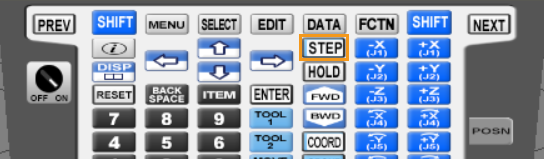
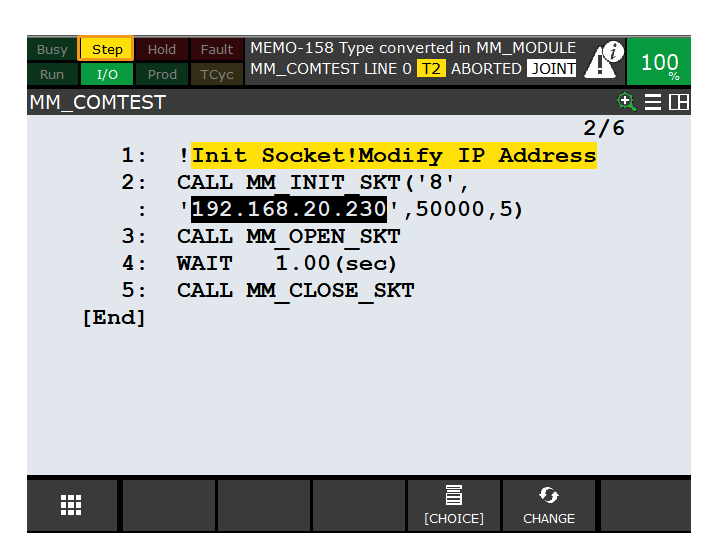
Appuyez sur STEP sur le boîtier d’enseignement pour passer en mode pas à pas. L’icône Step sur le boîtier d’enseignement devient jaune comme ci-dessous.
-
Appuyez et maintenez l’un des interrupteurs d’autorisation à l’arrière du boîtier d’enseignement.

-
Maintenez SHIFT enfoncé, puis appuyez de manière répétée sur FWD pour exécuter manuellement le programme MM_COMTEST en mode pas à pas. Si l’information MM:Restart Robot est renvoyée, redémarrez le robot.
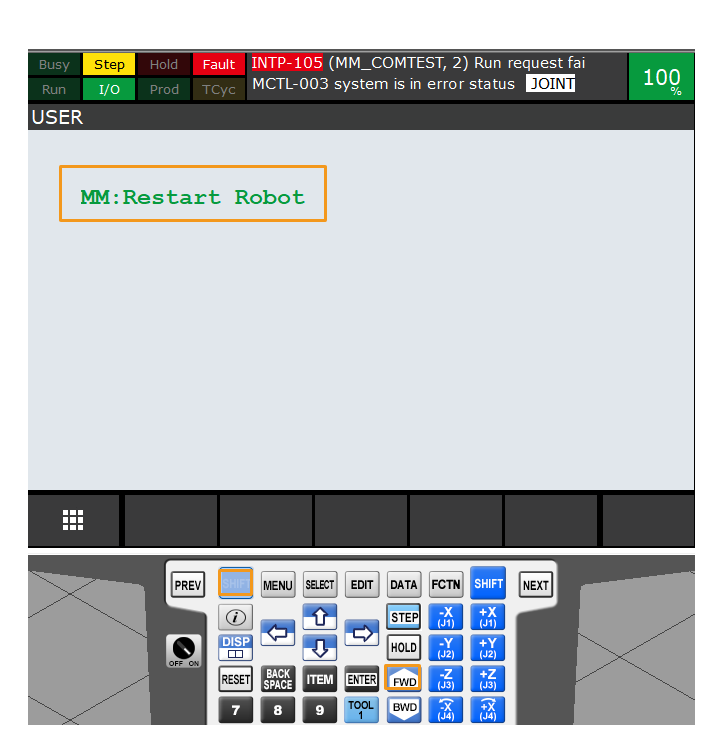
-
Après avoir redémarré le robot, maintenez SHIFT enfoncé, puis appuyez de manière répétée sur FWD pour exécuter manuellement MM_COMTEST en mode pas à pas.
-
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Log de Mech-Vision.
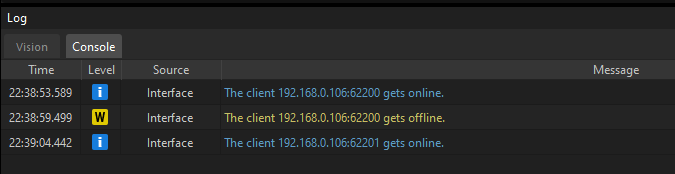
Vous avez désormais chargé le programme d’Interface standard du robot et les fichiers de configuration dans le système du robot pour établir la communication via l’Interface standard entre le système de vision et le robot.