Calcul des dimensions et des poses de moyeux de roue par ajustement de forme
Ce tutoriel vous montrera comment calculer avec précision les dimensions et les poses des moyeux de roue dans des scénarios de localisation de pièces et d’assemblage. En prenant pour exemple le projet « Calcul des dimensions et des poses de moyeux de roue par ajustement de forme », cette section explique comment ajuster les paramètres dans les Étapes concernées.
|
Étant donné que ce projet d’exemple contient des Étapes liées à la mesure en ligne et à la mesure 2D, veuillez sélectionner les plugins “step_geometric_tolerance_algo” et “step_measure2d” dans avant de télécharger le projet. |
Scénario d’application
Convient aux scénarios où le nuage de points latéral de l’objet annulaire (tel qu’un moyeu de roue ou une trémie en acier) est incomplet. Ce projet peut être utilisé pour calculer les dimensions et la pose de l’objet annulaire sur la base d’un ajustement de forme.

Exemple d’application
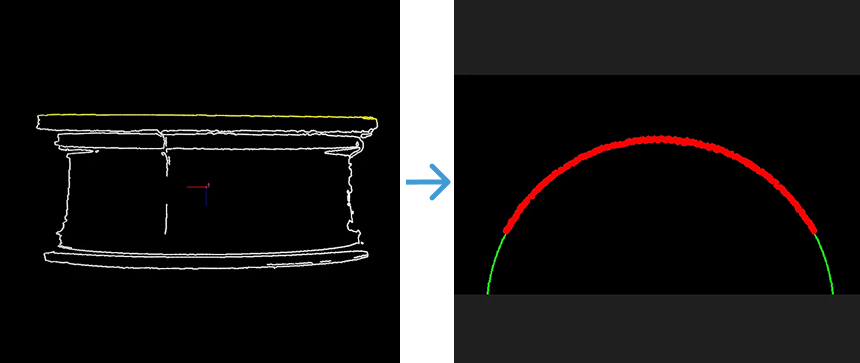
Bien que le nuage de points acquis sur le côté du moyeu de roue soit incomplet, le nuage de points acquis de la surface d’extrémité de type cylindrique permet de déterminer avec précision les dimensions et la pose du moyeu de roue en détectant et en mesurant les cercles.
Guide d’application
Après avoir pris connaissance du scénario d’application et de l’exemple, vous pouvez vous rendre dans la Bibliothèque de solutions pour télécharger le projet correspondant et apprendre à ajuster les paramètres conformément au contenu suivant.
Instructions d’utilisation de l’étape
Le projet d’exemple est montré dans la figure ci-dessous. Le projet contient une étape « Calcul des dimensions et des poses de moyeux de roue par ajustement de forme », et ses entrées et sorties sont décrites comme suit.
-
Entrée
-
Le nuage de points du bord de l’objet cible dans le repère du robot
-
-
Sortie
-
Le nuage de points du bord de la face d’extrémité de l’objet dans le repère du robot
-
Point central de l’objet dans le repère du robot
-
Dimensions de l’objet cible
-
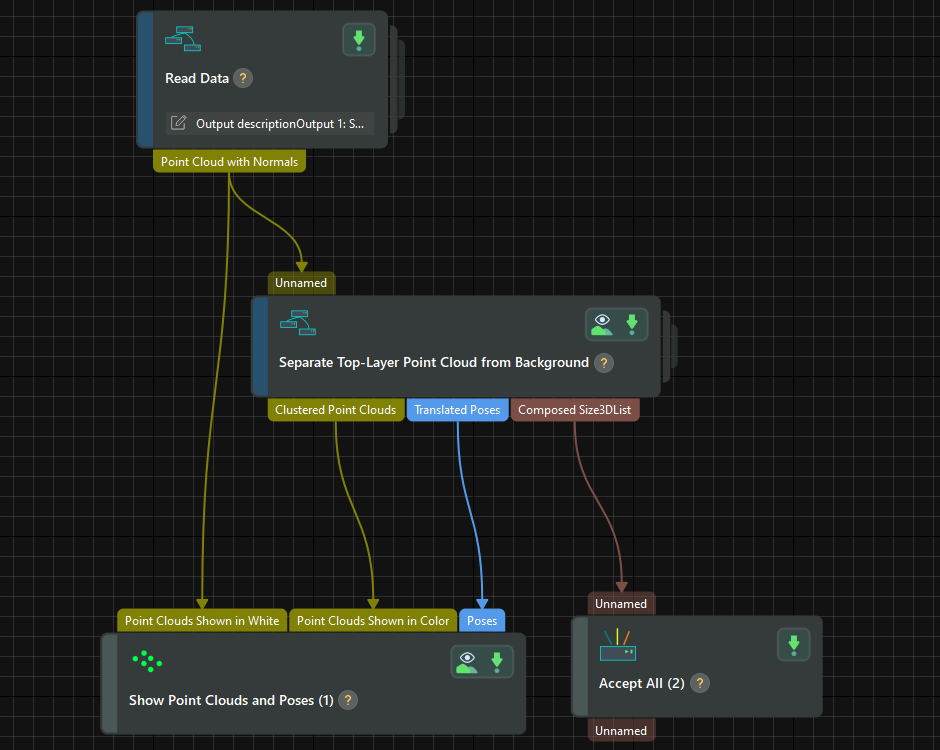
Réglage des paramètres
Vous devez uniquement ajuster les paramètres liés au regroupement du nuage de points, qui est utilisé pour supprimer le bruit et ne conserver que le nuage de points du bord de l’anneau situé sur le dessus de l’objet cible. Si les résultats du regroupement sont imprécis, essayez d’ajuster les paramètres afin d’optimiser les résultats du regroupement.