Introduction à la solution de robotique guidée par la vision 3D
Qu’est-ce que la solution de robotique guidée par la vision 3D ?
La solution de robotique guidée par la vision 3D intègre les technologies de détection, de perception et de programmation/planification de robots de Mech-Mind dans une solution globale, visant à relever les défis auxquels les robots font face dans des environnements complexes, inconnus ou dynamiques.
Cette solution offre un large éventail d’applications telles que le chargement de pièces guidé par la vision 3D, la dépalettisation et la palettisation, la localisation et l’assemblage, ainsi que la prise de pièces. Elle est largement utilisée dans diverses industries telles que l’automobile, la logistique, les supermarchés et l’industrie lourde.
En intégrant le système de vision Mech-Mind au système robotique, il est possible de construire une application robotique entièrement guidée par la vision pour amener le robot à exécuter des tâches intelligentes.
Pour les logiciels et les versions correspondantes nécessaires au déploiement de cette solution, veuillez vous référer à Combinaisons de versions logicielles recommandées pour la solution de guidage de robot 3D.
Composants d’une application robotique typique guidée par la vision 3D
Une application robotique guidée par la vision typique comprend généralement le robot, une ou plusieurs caméras, un ordinateur industriel (IPC) et les produits logiciels de Mech-Mind.
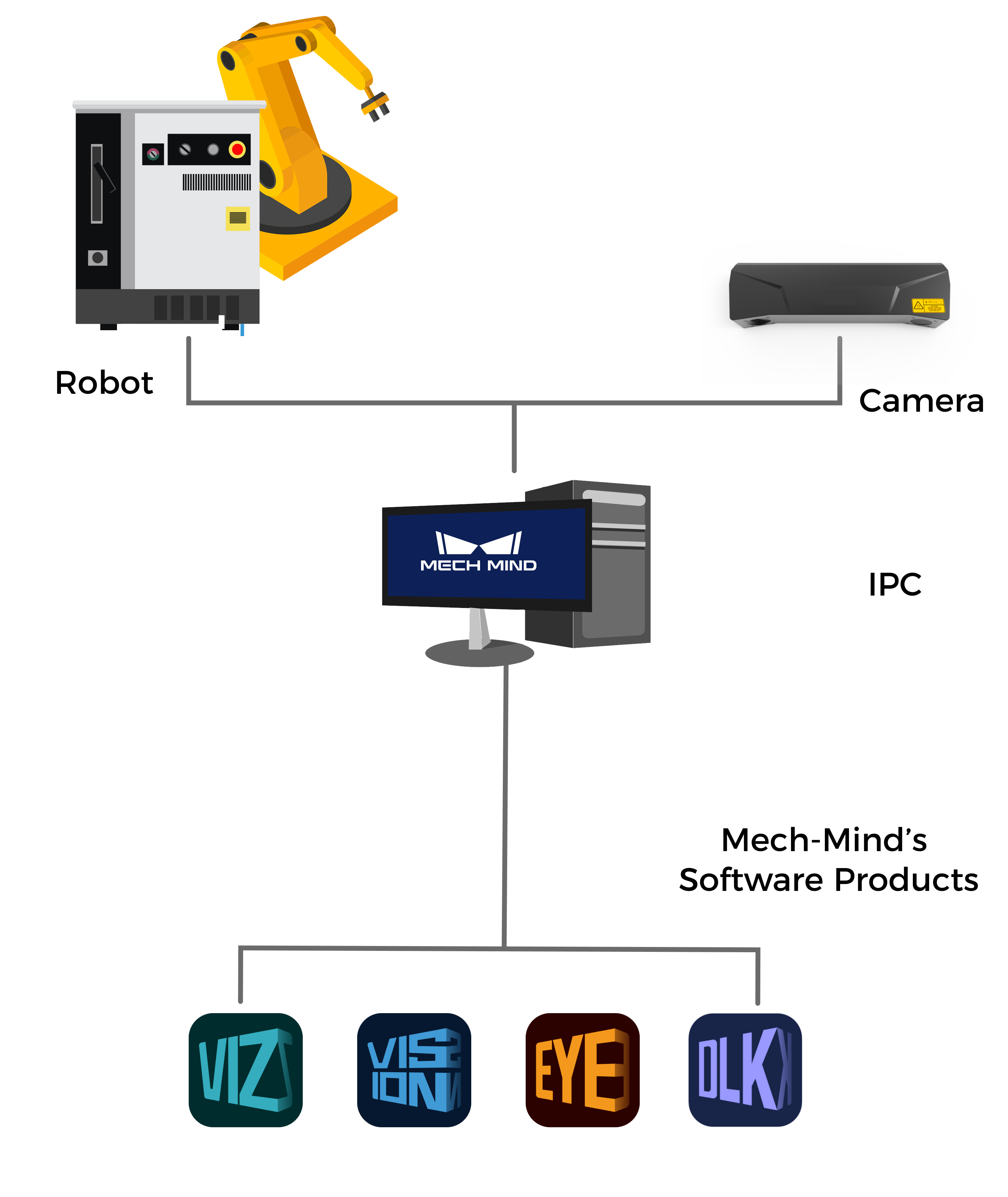
Robot
Un robot est un dispositif de manutention polyvalent programmable, doté d’une certaine autonomie, capable d’exécuter des tâches telles que le mouvement, la manipulation ou le positionnement. Dans le système de vision Mech-Mind, il exécute des tâches intelligentes sur la base des résultats fournis par le système de vision.
|
Caméra
Il s’agit de la caméra 3D industrielle Mech-Eye développée par Mech-Mind, utilisée pour capturer les informations d’image et de position des objets.
IPC
Il s’agit de l’ordinateur qui fournit l’environnement d’exécution pour les produits logiciels de Mech-Mind.
Vous pouvez utiliser l’IPC standard fourni par Mech-Mind (recommandé) ou utiliser votre propre appareil comme IPC. Pour plus d’informations sur l’IPC, consultez Choisir un modèle d’IPC.
Produits logiciels de Mech-Mind
Les produits logiciels de Mech-Mind effectuent un traitement de vision basé sur les informations d’image et de position capturées par la caméra, et produisent la position et l’orientation des objets ainsi que la trajectoire de mouvement planifiée du robot, guidant ainsi les robots pour accomplir des tâches intelligentes, telles que la prise de pièces, la dépalettisation et la palettisation, le collage, le tri, etc. Les fonctionnalités offertes par les différents logiciels de Mech-Mind varient. Pour plus de détails, reportez-vous à Présentation des produits logiciels de Mech-Mind.
|
Dans cet article, les caméras et l’IPC fournis par Mech-Mind, ainsi que les produits logiciels de Mech-Mind, constituent le système de vision Mech-Mind. |
Présentation des produits logiciels de Mech-Mind
Le système de vision Mech-Mind implique principalement les logiciels suivants :
-
Mech-Eye Viewer
Mech-Eye Viewer permet aux utilisateurs d’ajuster les paramètres de la caméra en fonction des caractéristiques de l’objet cible et d’obtenir des images 2D, des cartes de profondeur et des nuages de points de haute qualité.

-
Mech-Vision
Mech-Vision est un logiciel de vision industrielle de pointe. Grâce à son interface entièrement graphique, des applications avancées de vision industrielle telles que la prise de pièces, le positionnement haute précision, l’assemblage, l’inspection/mesure industrielle et la planification automatique de trajectoire peuvent être réalisées sans écrire de code.
À partir des données d’image capturées sur site, ce logiciel effectue une série de traitements de vision et produit les résultats de vision (tels que la position et l’orientation de l’objet cible). De plus, sur la base des résultats de vision, ce logiciel peut réaliser une planification de trajectoire sans collision pour le robot et fournir la trajectoire de prise planifiée.

-
Mech-Viz
Mech-Viz est un logiciel de planification de trajectoire de robot. Il utilise les informations fournies par Mech-Vision, y compris les nuages de points et les positions des pièces, pour planifier de manière intelligente la trajectoire du robot pour la prise, le transport, la palettisation et la dépalettisation, ainsi que pour d’autres scénarios d’application complexes.
Ce logiciel permet aux utilisateurs de construire un flux de travail pour le robot de manière visuelle et fournit une fonction de simulation 3D pour la validation avant l’utilisation du robot réel. Il est déjà compatible avec la plupart des grandes marques de robots dans le monde.

-
Mech-DLK
Mech-DLK est un logiciel d’apprentissage profond pour la vision industrielle. Avec une variété d’algorithmes d’apprentissage profond intégrés et leaders du secteur, il peut résoudre de nombreux problèmes que la vision traditionnelle ne peut pas traiter, tels que la segmentation, le positionnement et la classification très difficiles.
Grâce à des interactions d’interface utilisateur intuitives et simples, même sans programmation ni connaissances spécialisées en apprentissage profond, les utilisateurs peuvent rapidement effectuer l’entraînement et la validation de modèles avec ce logiciel.

-
Composant de communication pour le système de vision
Le composant de communication pour le système de vision (fonctionne en arrière-plan) permet l’échange de données entre les logiciels du système de vision et fournit une communication standardisée et personnalisée avec des dispositifs externes, tels que les robots, les PLC et les ordinateurs hôtes, ce qui rend possibles les applications robotiques intelligentes guidées par la vision.
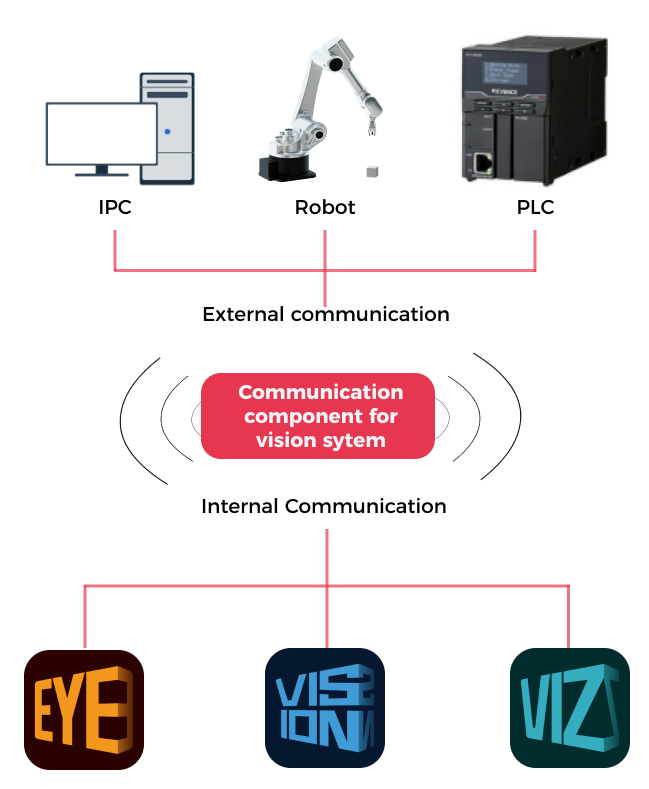
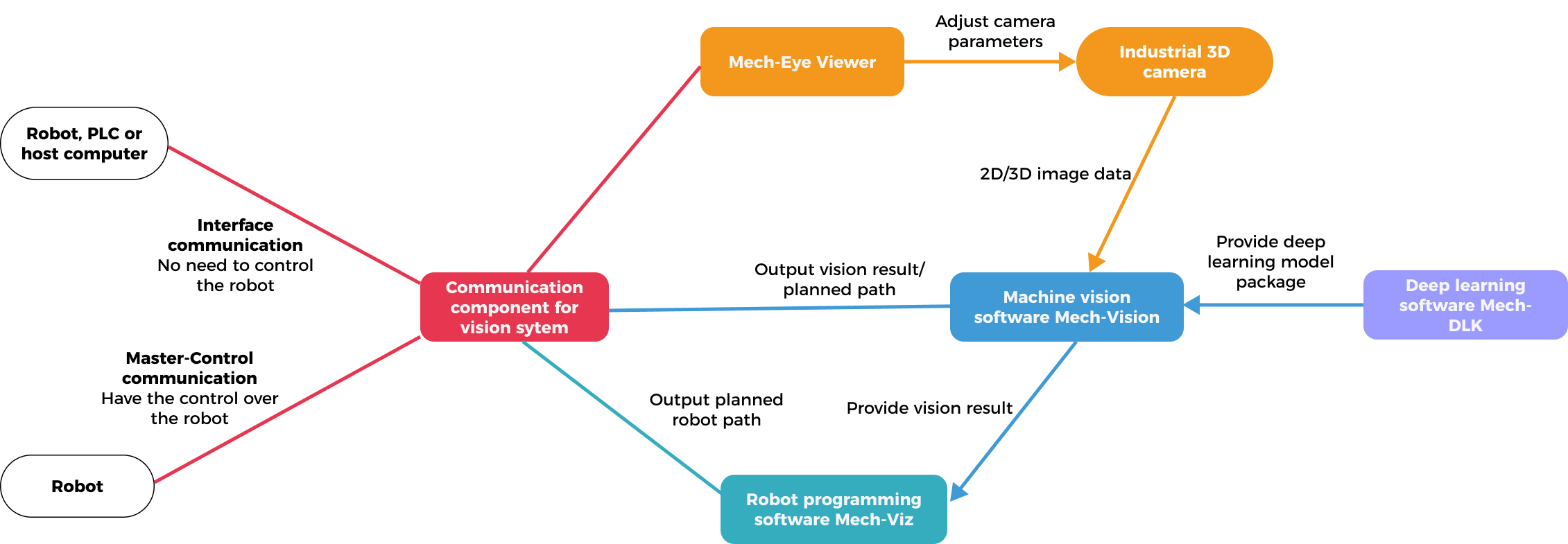
La relation entre les produits logiciels de Mech-Mind est illustrée dans la figure suivante.
Intégration avec le système robotique
Le système de vision Mech-Mind fournit des interfaces de communication externes et prend en charge la communication avec des robots, des PLC et des ordinateurs hôtes. Cela permet au système de vision de renvoyer au côté robot le résultat de vision ou la trajectoire de prise planifiée du robot (par Mech-Vision ou Mech-Viz).
Le système de vision Mech-Mind prend en charge les modes de communication suivants :
-
Communication maître-contrôle
Dans ce mode, la partie vision a le contrôle du robot, c’est-à-dire que le système de vision agit comme dispositif maître, tandis que le robot est le dispositif esclave. Le système de vision envoie des commandes de mouvement ou d’E/S au robot, et le robot écoute et exécute en continu ces commandes. Le système de vision contrôle le robot pour effectuer des tâches basées sur la trajectoire planifiée, telles que le chargement ou la dépalettisation/palettisation.
Lorsque ce mode est utilisé, le robot peut être contrôlé en chargeant un programme de contrôle maître sur le robot ou en utilisant le SDK (Software Development Kit) du robot. Ce mode prend en charge la communication entre le système de vision et le robot.
-
Communication par interface
Dans ce mode, le système de vision n’a pas besoin de prendre le contrôle du robot. En général, le côté robot agit comme dispositif maître, tandis que le système de vision est le dispositif esclave. Le côté robot et le système de vision utilisent le même protocole de communication standard pour communiquer (par exemple, socket TCP). Le côté robot envoie des requêtes tandis que le système de vision les traite et renvoie des réponses (poses et étiquettes des objets cibles). Selon la requête, le système de vision renvoie soit le résultat de vision, soit la trajectoire de prise planifiée. Le robot prend ensuite des décisions ou effectue les tâches appropriées en fonction des réponses renvoyées par le système de vision.
Lorsque ce mode est utilisé, vous devez écrire le programme d’interface du robot (pour communiquer avec le système de vision) et le programme d’application du robot (pour recevoir les données renvoyées par le système de vision et contrôler le robot pour effectuer des tâches), puis les charger sur le robot. Ce mode prend en charge la communication entre le système de vision et le robot, le PLC ou l’ordinateur hôte.
Pour plus d’informations sur les modes de communication, veuillez vous référer à la section Principes de base de la communication.