Approche du dépannage des erreurs de préhension
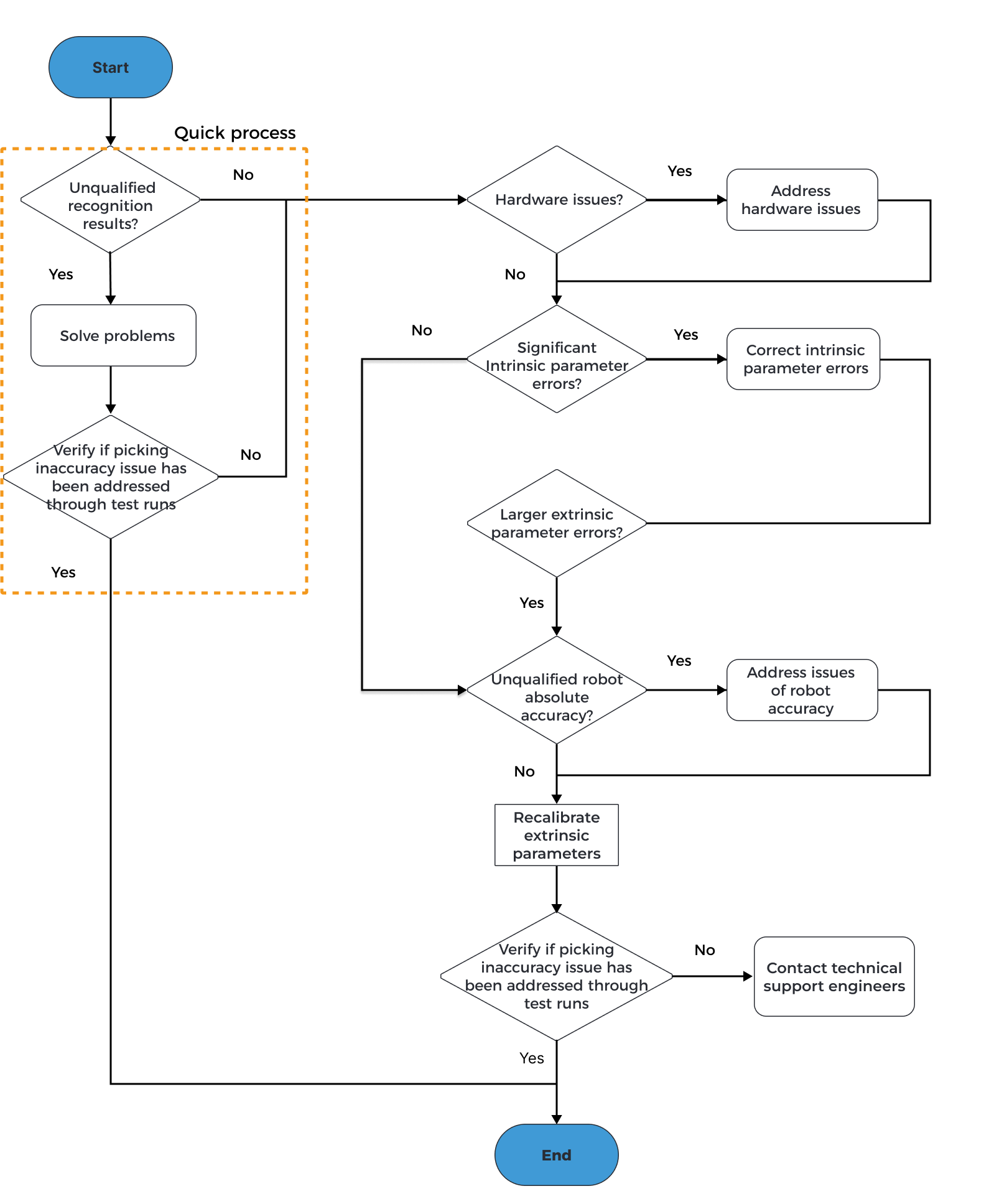
Lorsqu’un « problème d’imprécision de la préhension du robot » survient, vous pouvez généralement dépanner les erreurs de préhension selon le processus illustré dans la figure suivante:
| La partie suivante décrit les lignes directrices générales pour le dépannage des erreurs de préhension. Pour plus de détails sur les méthodes de vérification, les critères et les méthodes de correction d’erreurs pour chaque élément de vérification, voir les instructions dans les sections suivantes. |
Processus rapide
En fonction des facteurs les plus susceptibles d’affecter la précision de la préhension, commencez par vérifier si la qualité de la reconnaissance s’est dégradée (si la qualité du nuage de points s’est dégradée, si la performance d’inférence de l’apprentissage profond s’est dégradée (si le projet utilise l’apprentissage profond), ou si la performance d’appariement 3D s’est dégradée).
-
Si oui, identifiez immédiatement la cause du problème et contactez le Support technique pour le résoudre. Effectuez ensuite un essai pour vérifier si le problème a été résolu.
-
Si oui, le dépannage se termine.
-
Si non, suivez le processus complet pour continuer le dépannage.
-
-
Si non, suivez le processus complet pour continuer le dépannage.
Processus complet
Si la qualité de la reconnaissance du projet de vision ne se dégrade pas selon le processus rapide ci-dessus, suivez le processus ci-dessous pour continuer le dépannage:
-
Vérifier s’il existe des problèmes matériels.
-
Si oui, corrigez d’abord le problème matériel puis passez à l’étape suivante.
-
Si non, passez à l’étape suivante.
-
-
Vérifier si l’erreur des paramètres intrinsèques augmente.
-
Si oui, corrigez d’abord les paramètres intrinsèques, puis passez à l’étape suivante. Si les paramètres intrinsèques ne peuvent pas être corrigés, contactez le Support technique pour résoudre le problème.
-
Si non, passez à l’étape suivante.
-
-
Évaluer si l’erreur des paramètres extrinsèques augmente. Puis passez à l’étape suivante.
-
Vérifier si la précision absolue du robot diminue.
-
Le cas échéant, traitez les problèmes de précision du robot avant de passer à l’étape suivante.
-
Si non, passez à l’étape suivante.
-
-
Vérifier si le problème d’imprécision de la préhension a été résolu au moyen d’essais.
-
Si oui, le dépannage se termine.
-
Si non, contactez le Support technique.
-