Problèmes liés au processus « Prétraitement du nuage de points »
Cette section traite des problèmes courants concernant le processus « Prétraitement du nuage de points » ainsi que des causes possibles correspondantes et des solutions.
Mauvaise qualité du nuage de points
-
Symptôme
Après le prétraitement du nuage de points, la qualité des nuages de points était médiocre.
-
Causes possibles
-
Les paramètres d’exposition de la caméra n’étaient pas correctement définis.
-
Un éclairage puissant sur site a perturbé l’acquisition d’images.
-
Les parois du bac sont réfléchissantes, ce qui entraîne une mauvaise qualité du nuage de points.
-
-
Solutions
-
Définissez des paramètres d’exposition de la caméra appropriés en fonction de la situation réelle de l’objet cible. Pour les objets fortement réfléchissants, il est recommandé de définir le Mode de codage des franges de Laser sur Réfléchissant dans Mech-Eye Viewer. Ce paramètre est visible uniquement lorsque la visibilité est définie sur Expert ou Guru.
-
Ombrer le poste pour éviter une exposition directe à une lumière intense.
-
Il est recommandé d’utiliser des bacs non réfléchissants, tels que des bacs à parois creuses.
-
Nuage de points d’arrière-plan non supprimé
-
Symptôme
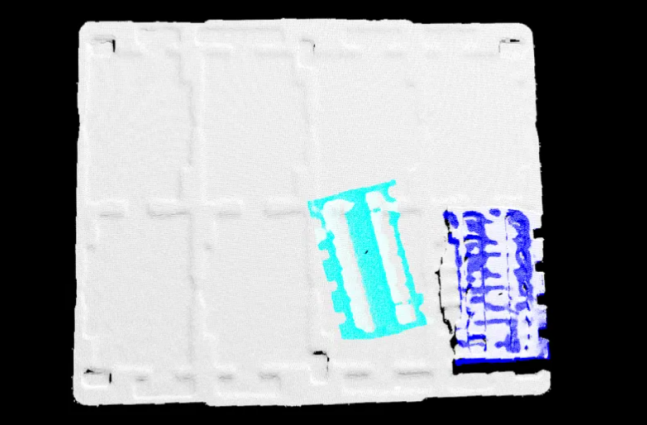
Après le prétraitement du nuage de points, le nuage de points d’arrière-plan n’a pas été supprimé, ce qui a affecté le résultat de reconnaissance ultérieur. Comme montré ci-dessous, le nuage de points d’arrière-plan est reconnu par erreur comme un objet cible.
-
Cause possible
Le réglage des paramètres liés au prétraitement du nuage de points n’était pas approprié.
-
Solutions
-
Réduisez le paramètre Angle polaire maximal sous « Filtre de points » pour supprimer le nuage de points coincé entre l’objet cible et l’arrière-plan tout en veillant à ce que le nuage de points de l’objet cible reste aussi complet que possible.
-
Ajustez les paramètres sous « Supprimer le bruit par regroupement ».
Paramètre Instruction Rayon du cluster
Dans la plupart des cas, conservez le réglage par défaut. Augmenter cette valeur permet de regrouper en un cluster des nuages de points plus éloignés, mais cela peut entraîner un temps d’exécution de l’étape plus long.
Nombre minimum de points par cluster
La valeur du paramètre doit être supérieure au nombre de points du nuage de points de bruit et inférieure au nombre de points du nuage de points de l’objet cible.
Nombre maximum de points par cluster
La valeur du paramètre doit être supérieure au nombre de points du nuage de points de l’objet cible. Si le nombre de points du nuage de points d’arrière-plan à supprimer est important, définissez la valeur de ce paramètre inférieure au nombre de points du nuage de points d’arrière-plan.
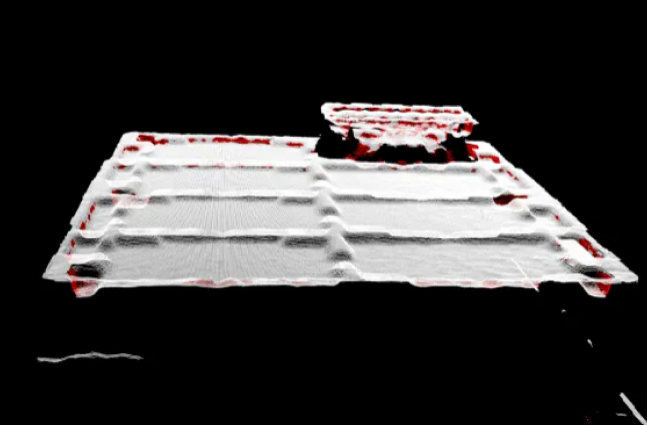
Après avoir ajusté les paramètres ci-dessus, vous pouvez supprimer le nuage de points d’arrière-plan, c’est-à-dire le nuage de points blanc dans la figure ci-dessous.
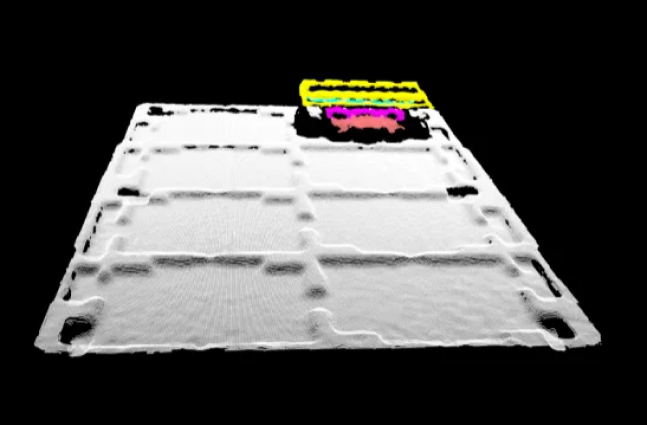
Si le nuage de points d’arrière-plan ne peut pas être supprimé par le regroupement en clusters, vous pouvez activer Assister la reconnaissance par apprentissage profond dans le processus « Sélection et reconnaissance de l’objet cible ».
-
Bruit dans les nuages de points
-
Symptôme
Il y avait du bruit dans les nuages de points d’origine.
-
Solution
Vous pouvez supprimer le bruit des nuages de points en ajustant le Nombre minimum de points par cluster sous « Supprimer le bruit par regroupement ».
