Configuration de la communication du robot
Dans ce tutoriel, vous apprendrez à charger les fichiers du programme Interface Standard sur le robot KUKA, et à configurer la communication via l’Interface Standard entre le système de vision Mech-Mind et le robot.
|
Préparation avant le chargement
Vérifier la compatibilité du contrôleur et du logiciel
-
Le robot a été identifié comme un robot KUKA 6 axes. Cette section prend KUKA_KR_10_R1100_2_HO comme exemple.
-
La version du contrôleur est KR C4.
-
Version du logiciel système du contrôleur : KSS 8.2, 8.3, 8.5 ou 8.6.
Cliquez ici pour les instructions
-
Cliquez sur
 , et sélectionnez .
, et sélectionnez .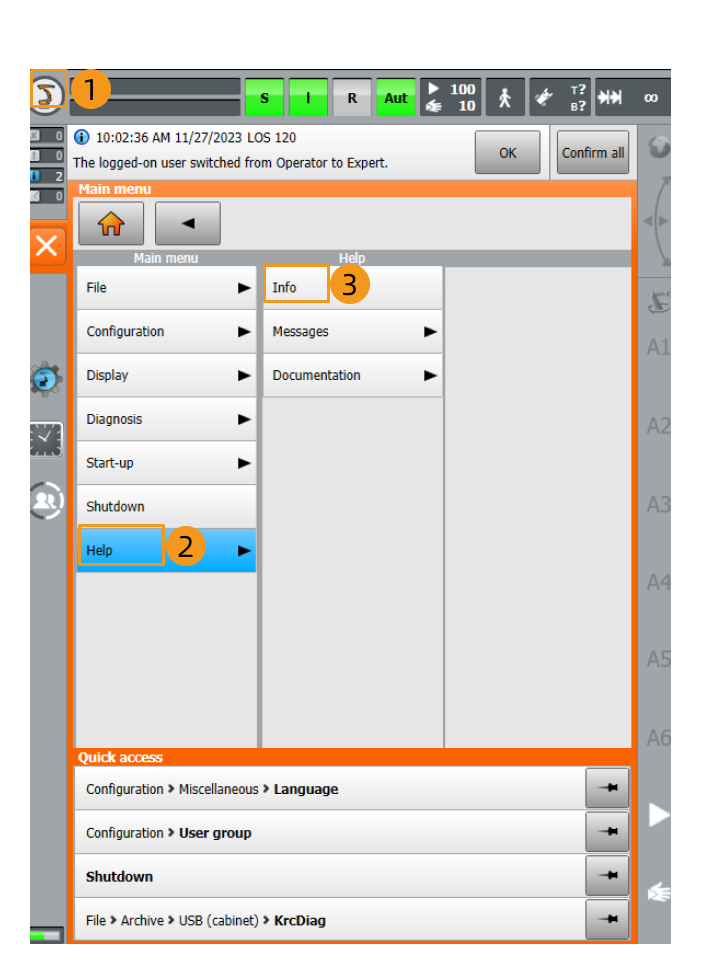
-
Vérifiez la version du logiciel système du contrôleur dans l’interface Informations.
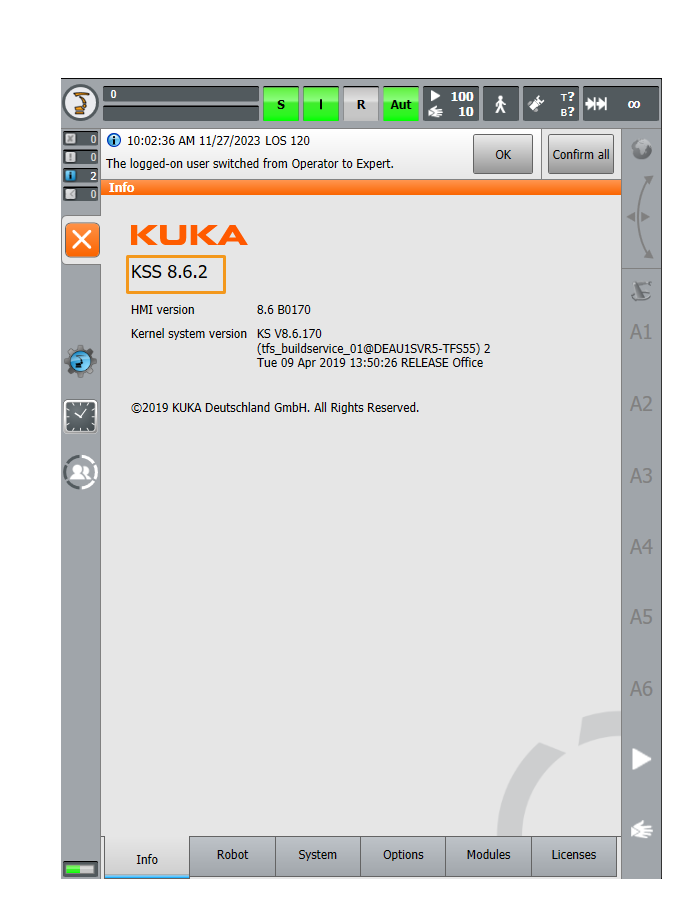
-
-
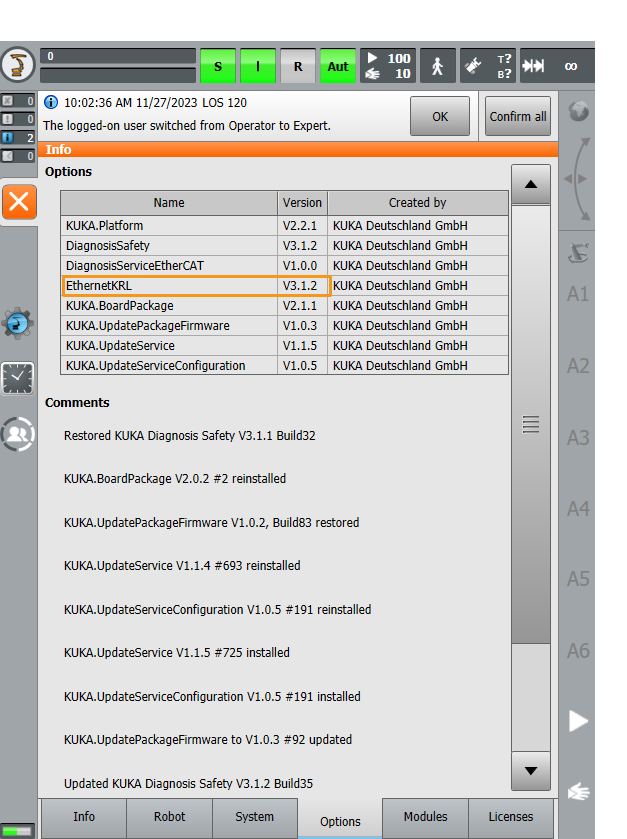
Paquet logiciel additionnel : Ethernet KRL (V 2.2.8, 3.0.3 ou 3.1.2.29).
La correspondance entre les versions KSS et Ethernet KRL est la suivante :
Version KSS Version Ethernet KRL 8.2 or 8.3
2.2.8
8.5
3.0.3
8.6
3.1.2.29
Cliquez ici pour les instructions
Cliquez sur Options dans l’interface Informations pour afficher la version d’Ethernet KRL.
|
Toutes les actions sur le pupitre d’enseignement de ce chapitre sont réalisées sur KSS 8.6. Les étapes spécifiques et les sélections de menus peuvent différer légèrement selon les versions du pupitre d’enseignement. |
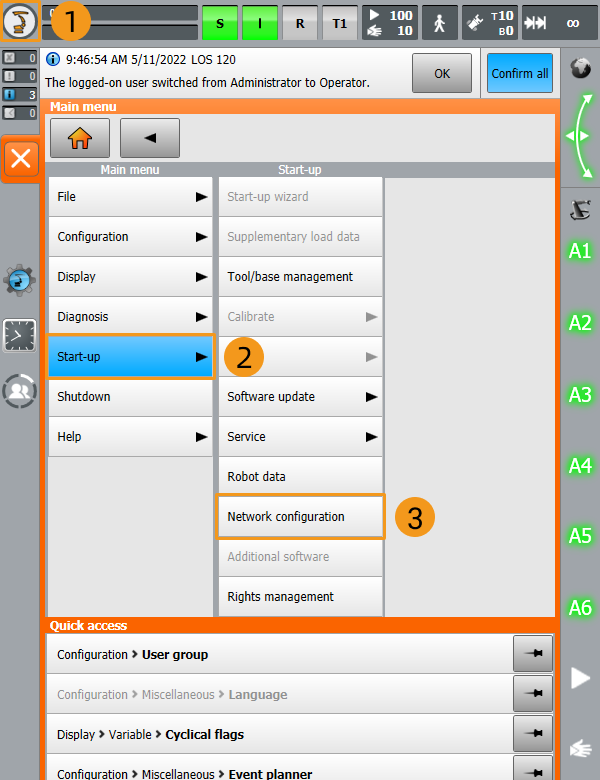
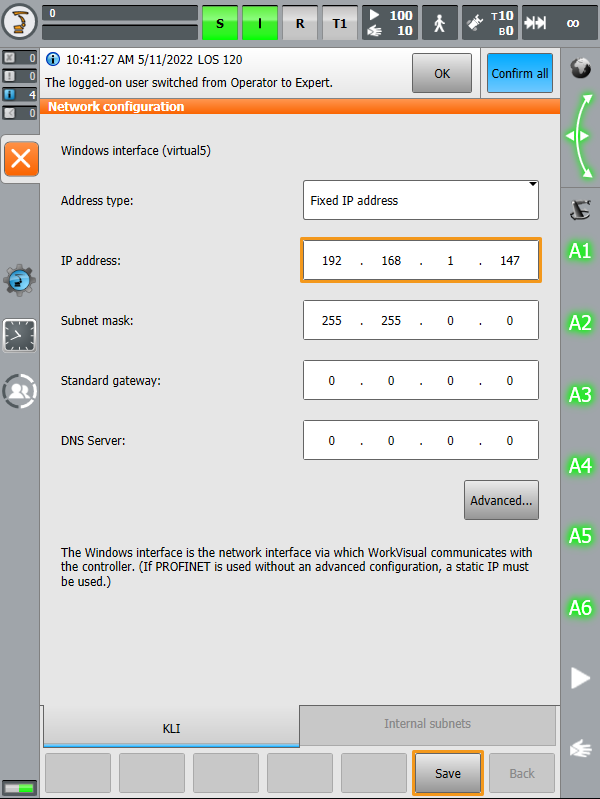
Configurer la connexion réseau
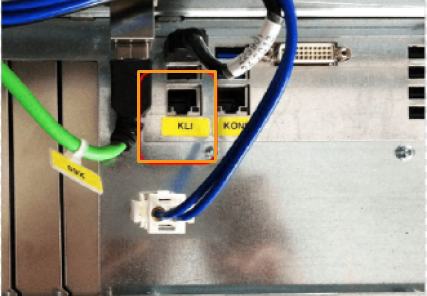
Connecter le matériel
-
KR C4 Compact : connecter le port X66.
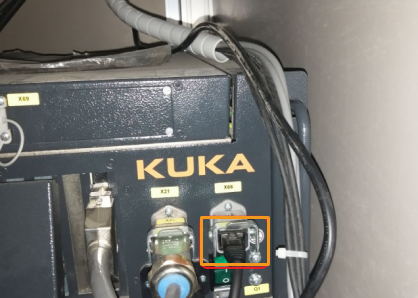
-
Autres contrôleurs KR C4 : connecter le port KLI.
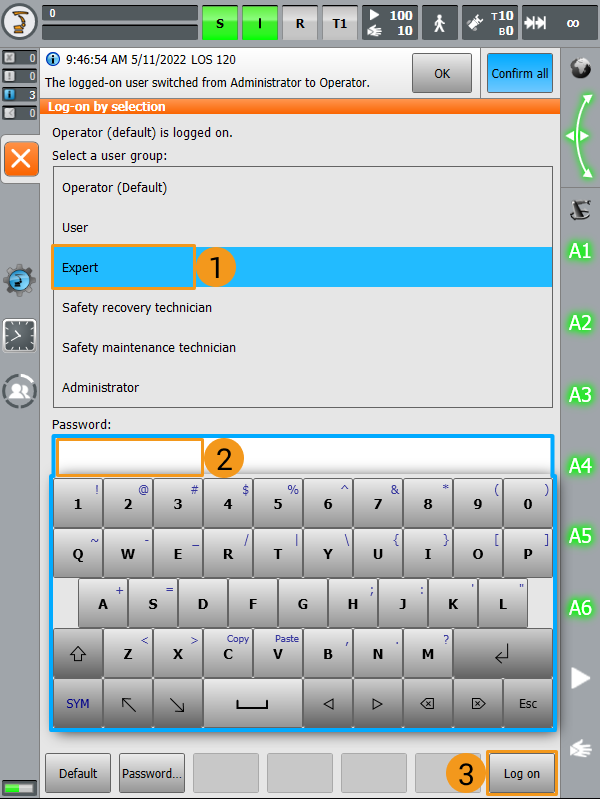
Passer en mode Expert
-
Cliquez sur
, et sélectionnez pour accéder à l’interface de connexion.
-
Sélectionnez Expert, saisissez le mot de passe (le mot de passe par défaut est kuka), puis cliquez sur Se connecter.
Créer un projet Mech-Vision et l’enregistrer
-
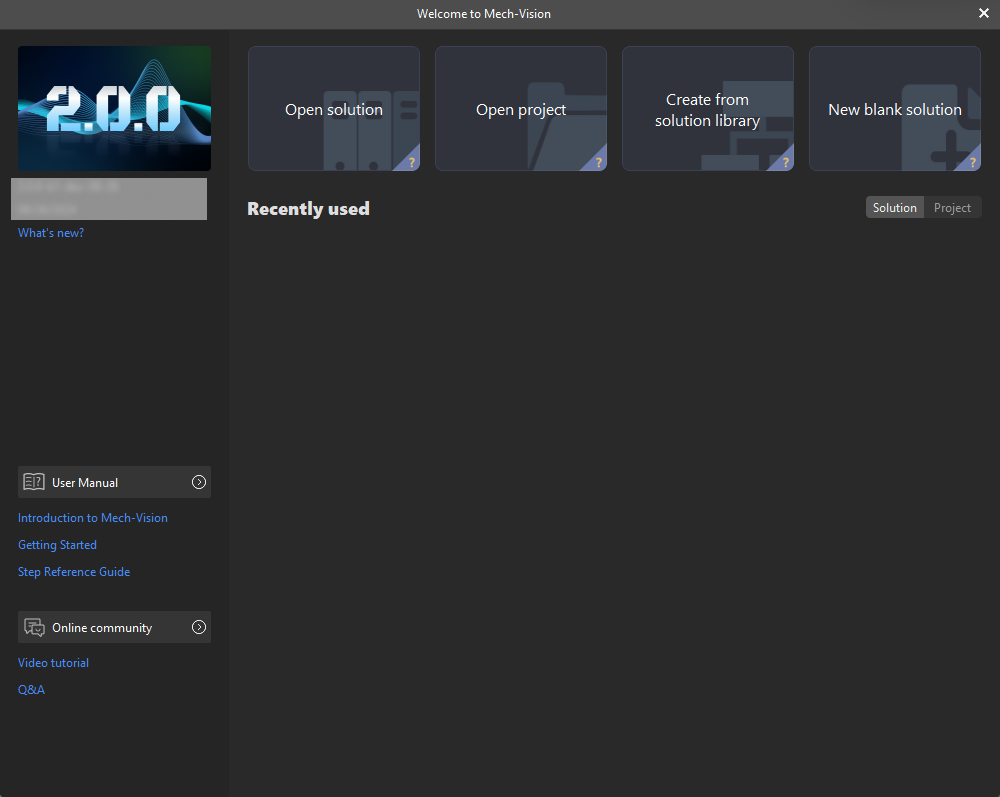
Ouvrez Mech-Vision. Si l’interface de bienvenue présentée ci-dessous s’affiche, cela indique que Mech-Vision a démarré avec succès.
-
Dans l’interface de bienvenue de Mech-Vision, cliquez sur Créer à partir de la bibliothèque de solutions pour ouvrir la Bibliothèque de solutions.

La Bibliothèque de solutions est une bibliothèque de ressources qui fournit des solutions ou des projets typiques (avec des données d’exemple) provenant de divers scénarios d’application. -
Dans l’onglet Modèle d’application de la Bibliothèque de solutions, sélectionnez la solution Loading Neatly Arranged Target Objects, comme illustré ci-dessous.
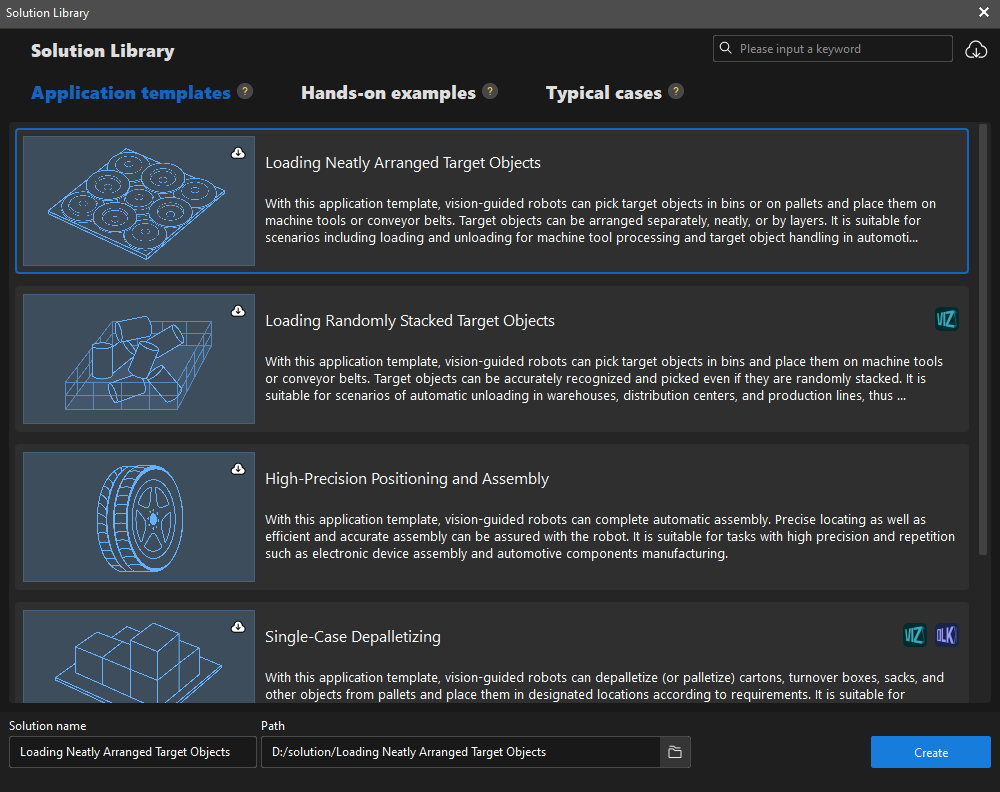
Si vous ne trouvez pas la solution Loading Neatly Arranged Target Objects dans la Bibliothèque de solutions, cliquez sur l’icône Télécharger dans l’angle supérieur droit.
-
Définissez le nom et le chemin de la solution, puis cliquez sur Créer.
Après la création du projet, la solution et le projet créés s’affichent dans la liste des projets dans le coin supérieur gauche de l’interface principale de Mech-Vision.
-
Une solution est un ensemble de configurations et de données liées aux robots et à la communication avec les robots, au traitement de vision, à la planification de trajectoire, etc., nécessaires pour l’application de vision industrielle.
-
Un projet est un flux de travail de traitement de vision dans la solution. Normalement, une solution ne contient qu’un seul projet Mech-Vision, mais elle peut en contenir plusieurs dans des scénarios d’application complexes.
-
La solution Loading Neatly Arranged Target Objects ne contient qu’un seul projet “Vis_Target_Object_Recognition”.
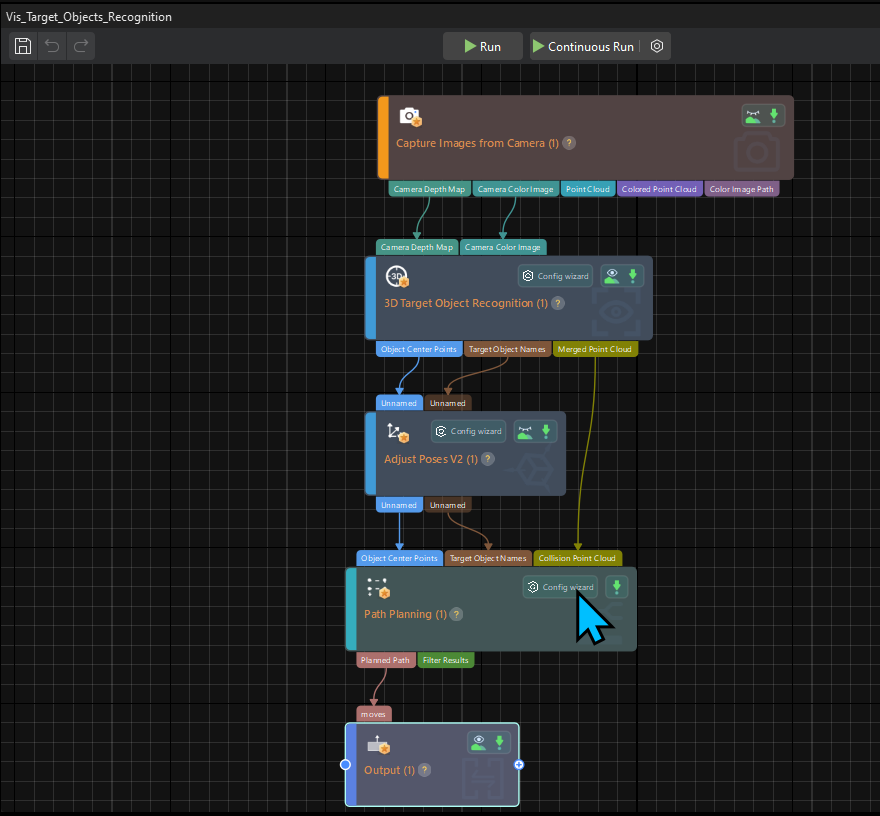
Dans l’Espace de programmation graphique de l’interface principale, le flux de travail du projet “Vis_Target_Object_Recognition” est affiché.
-
-
Dans la liste des projets, cliquez avec le bouton droit sur la solution, puis sélectionnez Chargement automatique de la solution.
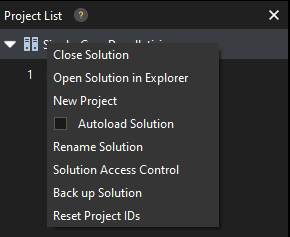
Une fois le chargement automatique défini pour cette solution, le nom du projet s’affiche en vert et l’ID du projet s’affiche à gauche du nom du projet.
L’ID du projet sera utilisé par le programme de prise et de dépose du robot pour déclencher l’exécution du projet Mech-Vision. -
Dans la barre de menus, sélectionnez .
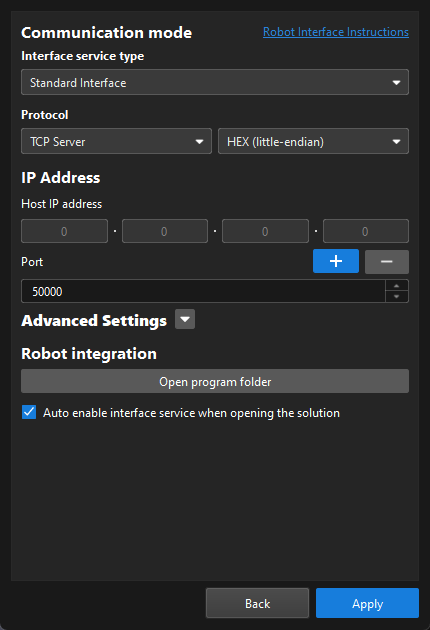
Configurer la communication du robot
Dans cet exemple, la configuration de la communication du robot a été définie par défaut pour le robot KUKA (KUKA_KR_10_R1100_2_HO). L’option Configuration de la communication du robot dans la barre d’outils est activée.
Sauvegarder le programme du robot
| Assurez-vous d’avoir basculé en mode Expert. Sinon, la clé USB n’apparaîtra pas sur le pupitre d’enseignement. |
-
Branchez au contrôleur la clé USB qui contient le fichier de sauvegarde, et assurez-vous que la clé USB apparaît sur le pupitre d’enseignement.
-
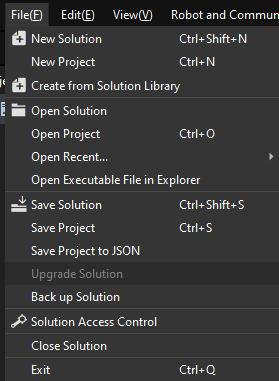
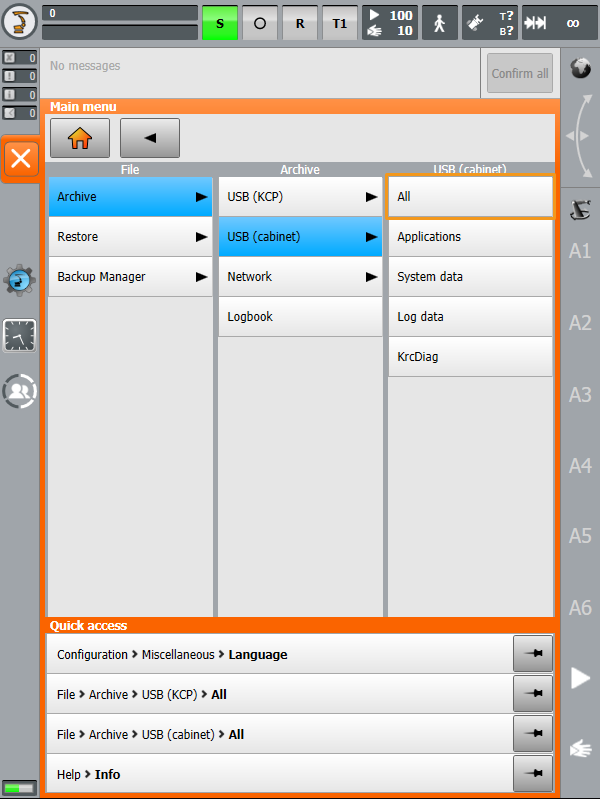
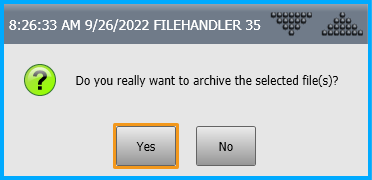
Cliquez sur
, sélectionnez , puis cliquez sur Oui dans la fenêtre contextuelle pour démarrer la sauvegarde.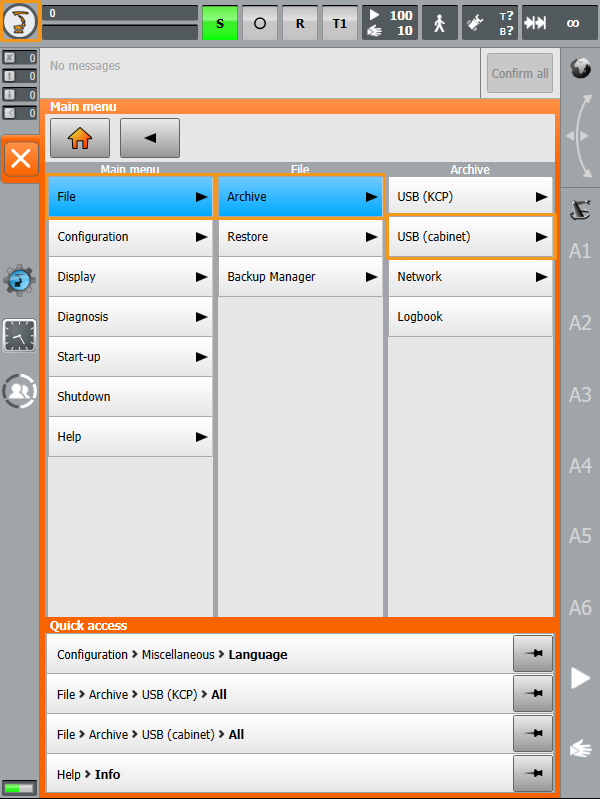
-
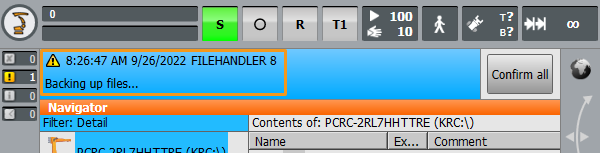
Si les informations suivantes s’affichent sur le pupitre d’enseignement, la sauvegarde est terminée. Un fichier ZIP est enregistré sur la clé USB. Débranchez la clé USB.
Préparer les fichiers programme
Accédez à Communication Component\Robot_Interface depuis le répertoire d’installation de Mech-Vision & Mech-Viz, et copiez les fichiers suivants du dossier KUKA vers votre clé USB :
-
mm_module.src (fichier programme)
-
mm_module.dat (fichier programme)
-
XML_Kuka_MMIND.xml (fichier de configuration réseau)
-
MM_COMTEST.src (fichier programme pour tester la communication)
-
MM_COMTEST.dat (fichier programme pour tester la communication)
|
Charger les fichiers programme sur le robot
| Assurez-vous d’avoir basculé en mode Expert. Sinon, la clé USB n’apparaîtra pas sur le pupitre d’enseignement. |
-
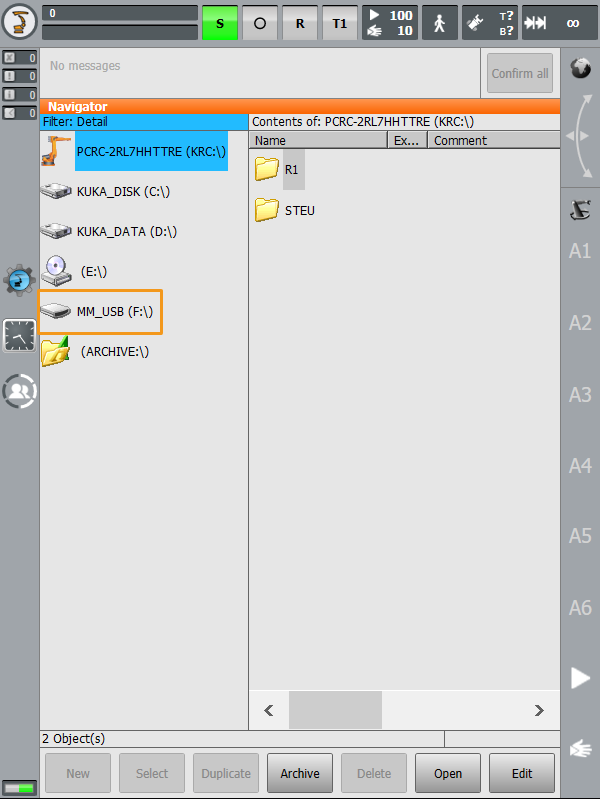
Branchez la clé USB au contrôleur, sélectionnez la clé USB dans le panneau de gauche, puis localisez le dossier mentionné précédemment.
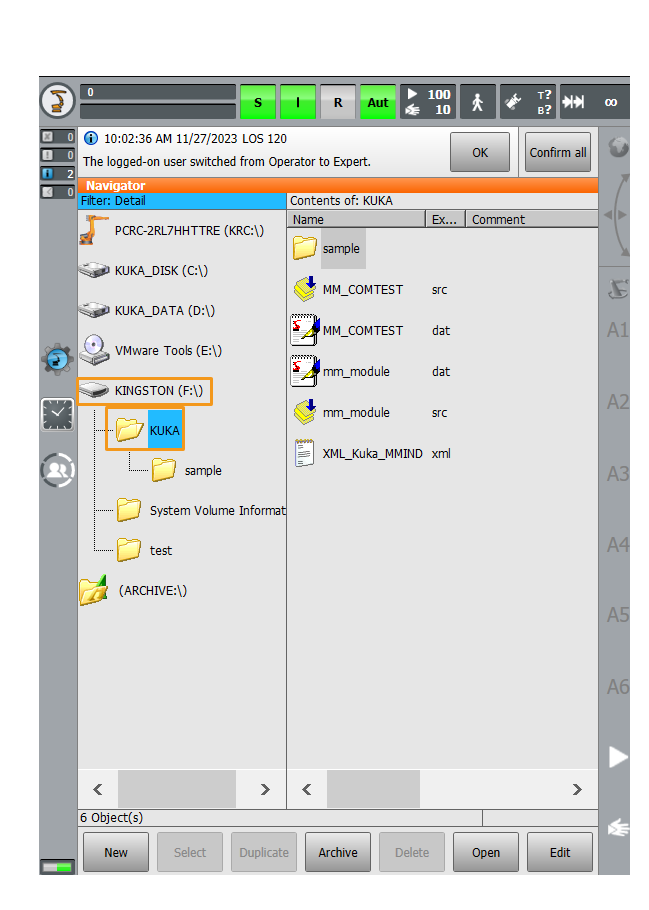
-
Copiez mm_module.src, mm_module.dat, MM_COMTEST.src et MM_COMTEST.dat dans le répertoire
KRC:\R1\mm. Si le dossier mm n’existe pas, créez-le.-
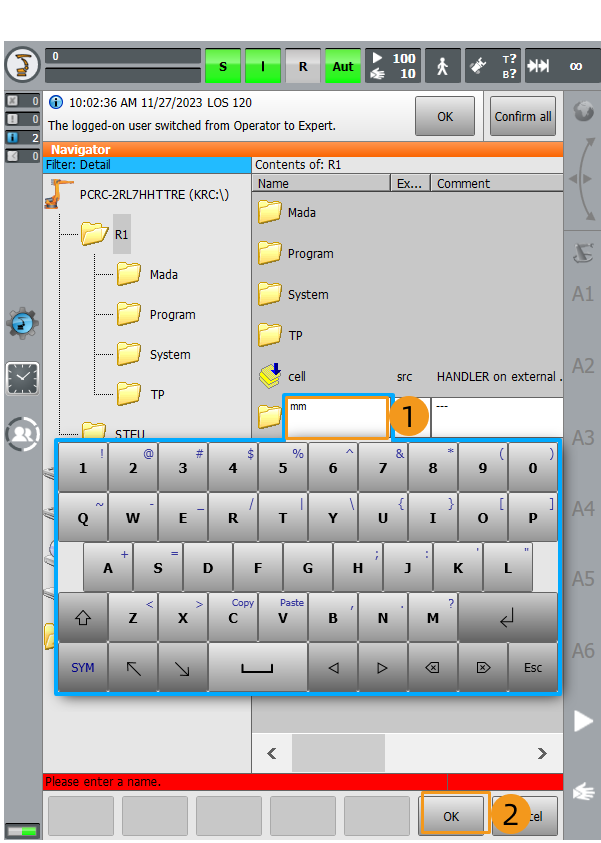
Créer un dossier mm.
Cliquez sur KRC:\, cliquez sur le dossier R1, puis cliquez sur Nouveau.
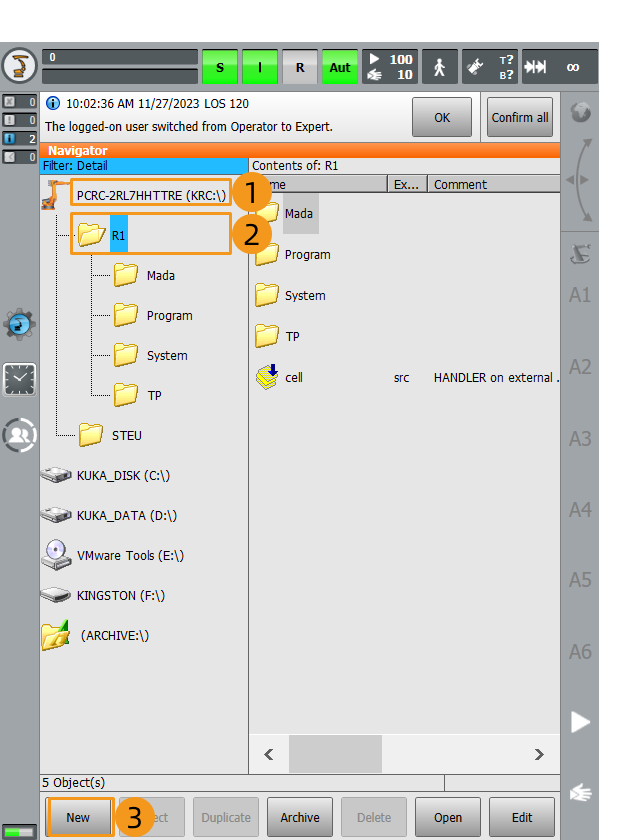
Saisissez mm comme nom de dossier dans la fenêtre contextuelle et cliquez sur OK pour créer le dossier mm.
-
Sélectionnez mm_module.src, mm_module.dat, MM_COMTEST.src et MM_COMTEST.dat depuis le dossier KUKA de la clé USB, cliquez sur Modifier, puis sur Copier.
Appuyez longuement et faites glisser pour sélectionner plusieurs fichiers adjacents. 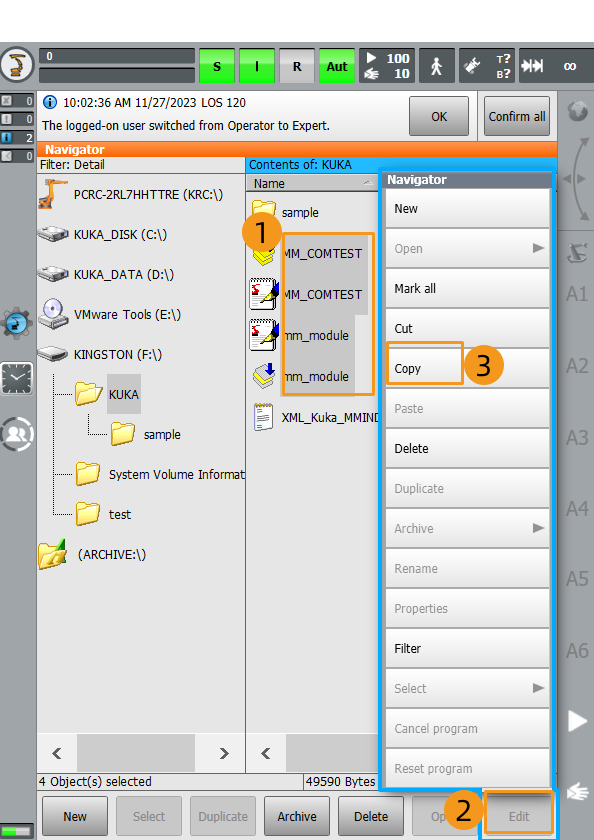
-
Sélectionnez le dossier mm dans le répertoire
KRC:\R1et cliquez sur Ouvrir.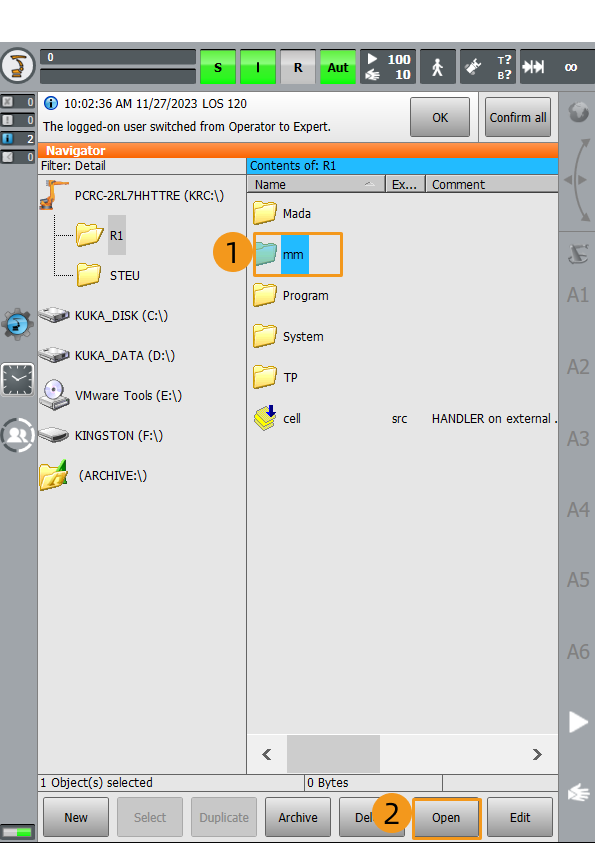
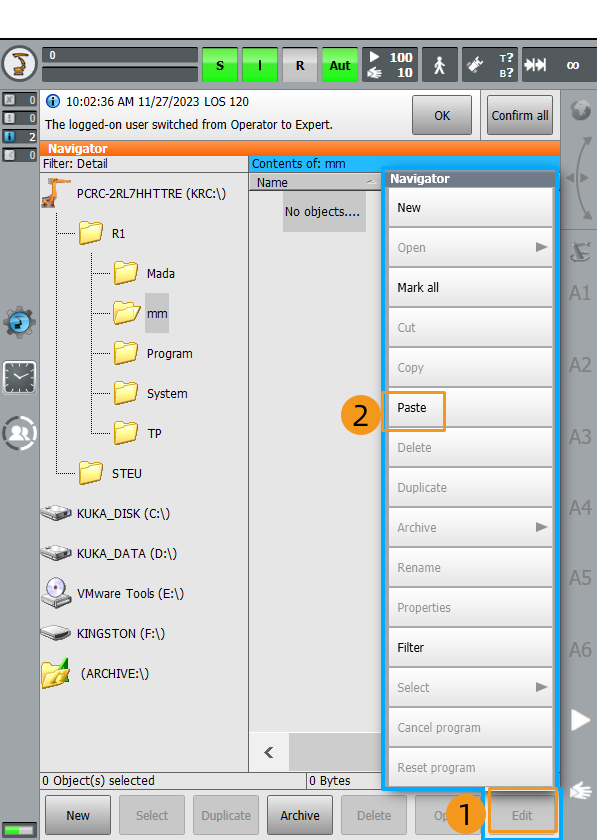
-
Sélectionnez pour coller les fichiers sélectionnés.
-
-
Suivez les étapes précédentes pour copier et coller XML_Kuka_MMIND.xml vers
C:\KRC\ROBOTER\Config\User\Common\EthernetKRL. -
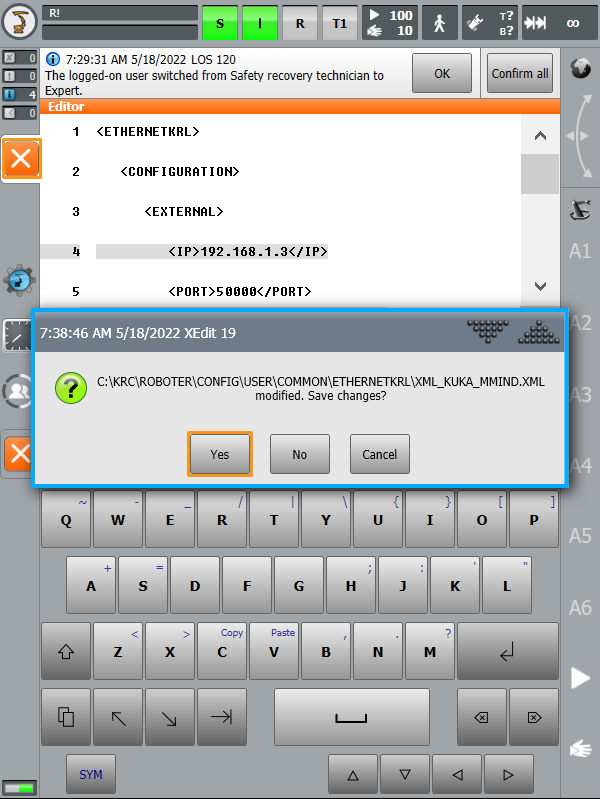
Sélectionnez XML_Kuka_MMIND.xml depuis
C:\KRC\ROBOTER\Config\User\Common\EthernetKRLet cliquez sur Ouvrir.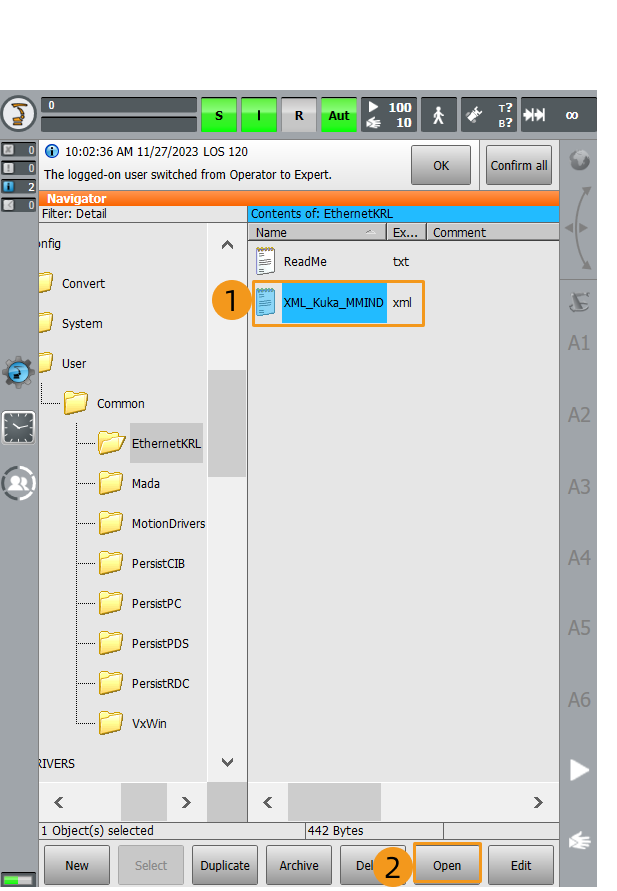
-
Sélectionnez la ligne 4 et cliquez sur
 à gauche pour faire apparaître le clavier. Modifiez l’adresse IP sur cette ligne pour celle de l’IPC, puis cliquez de nouveau sur pour masquer le clavier. Le numéro de port de la ligne 5 doit être identique au numéro de port du PC hôte défini dans Mech-Vision. Pour modifier le numéro de port, répétez les étapes précédentes.
à gauche pour faire apparaître le clavier. Modifiez l’adresse IP sur cette ligne pour celle de l’IPC, puis cliquez de nouveau sur pour masquer le clavier. Le numéro de port de la ligne 5 doit être identique au numéro de port du PC hôte défini dans Mech-Vision. Pour modifier le numéro de port, répétez les étapes précédentes.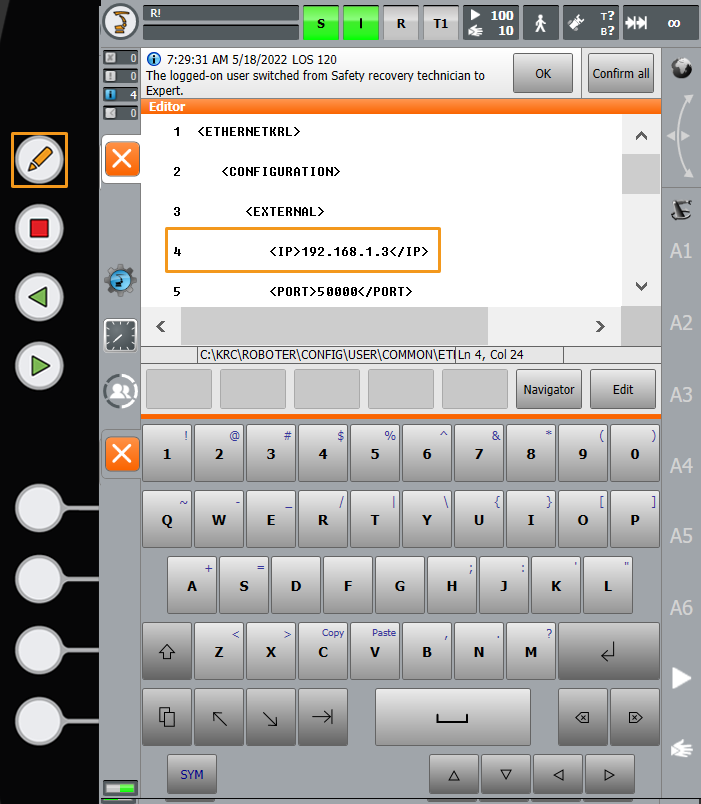
-
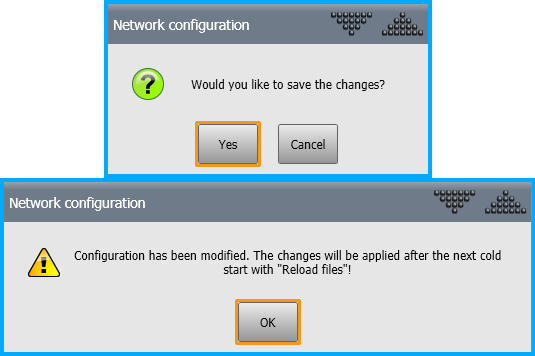
Une fois la modification terminée, cliquez sur le bouton de fermeture à gauche. Dans la fenêtre contextuelle, cliquez sur Oui pour enregistrer la modification.
-
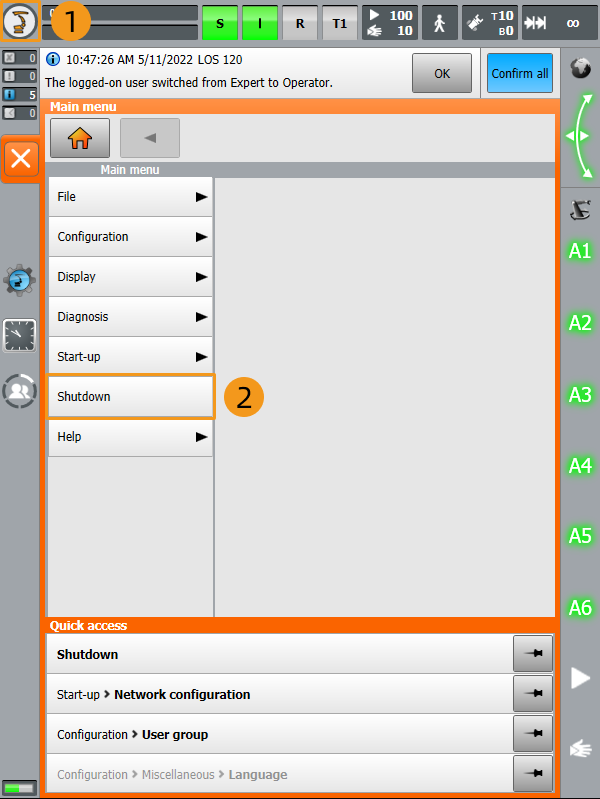
Suivez les instructions de passage en mode Expert pour passer en mode Administrateur. Cliquez sur
. Dans le menu contextuel, sélectionnez Arrêt pour accéder à l’interface d’arrêt.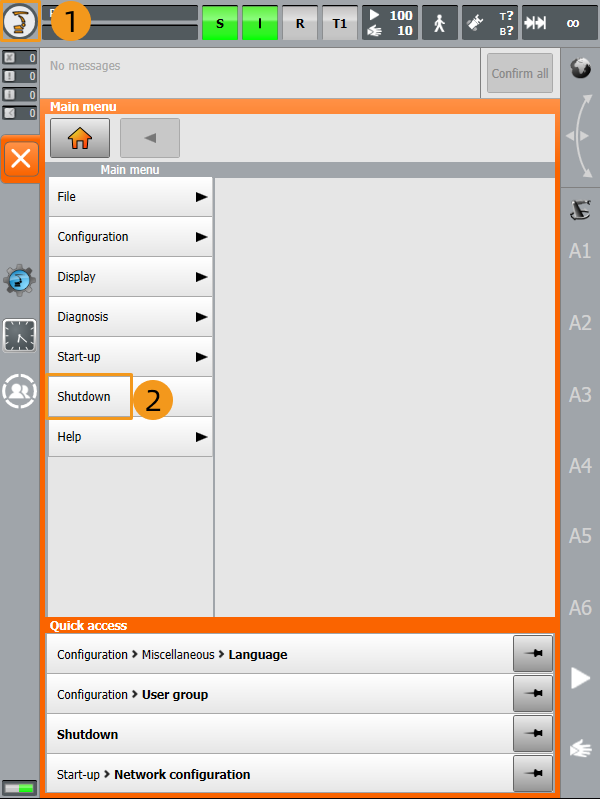
-
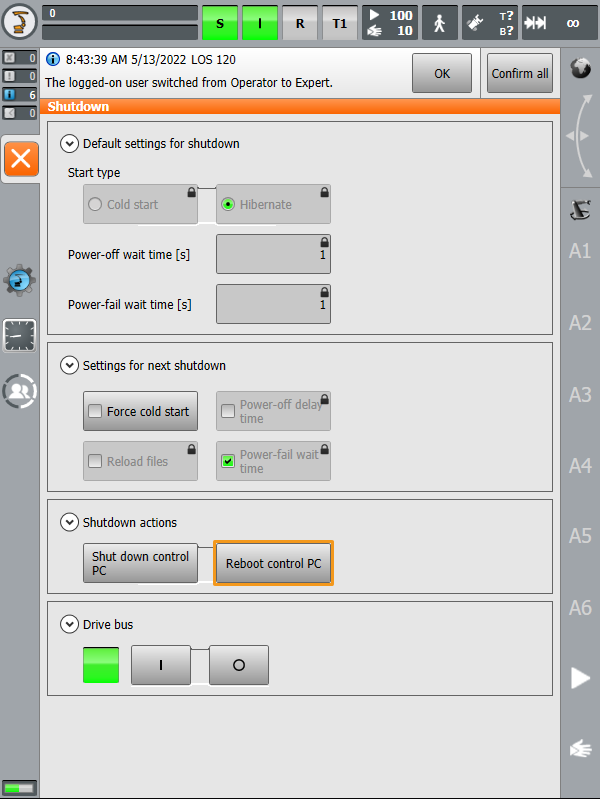
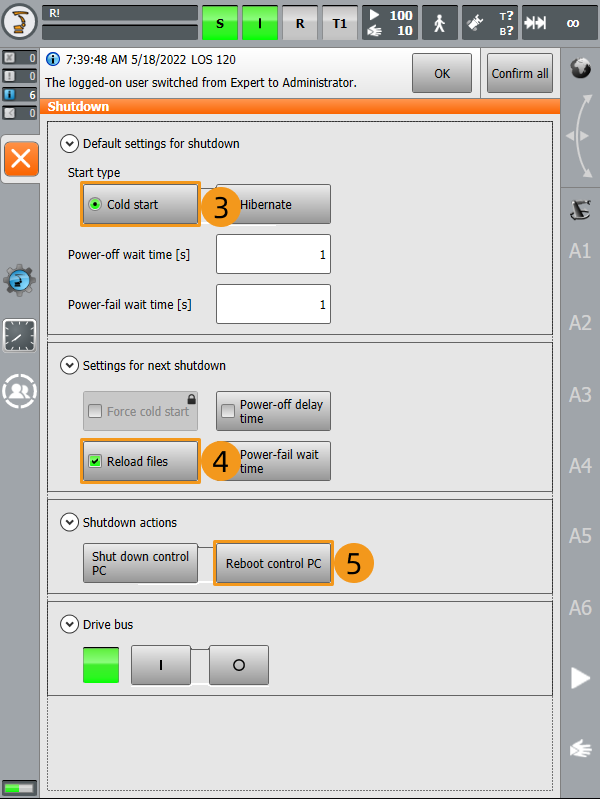
Sélectionnez Démarrage à froid, Recharger les fichiers et Redémarrer l’ordinateur de contrôle.
-
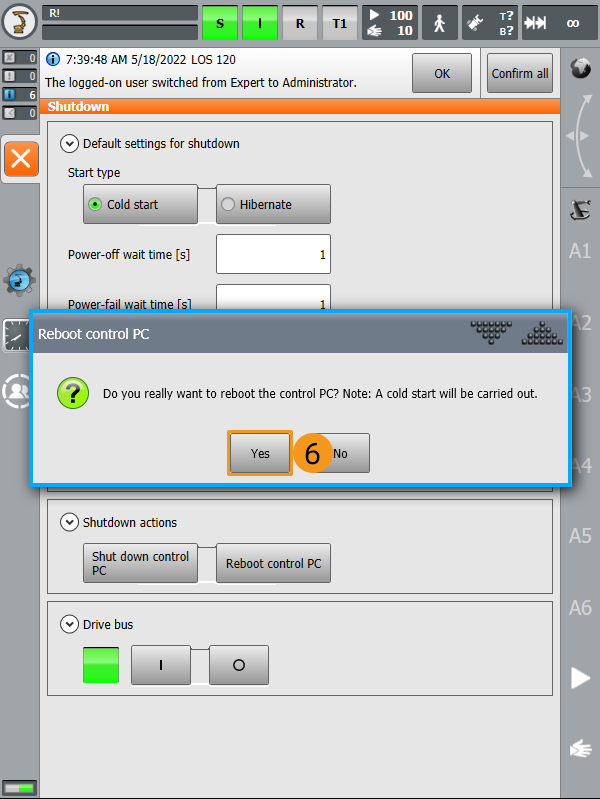
Dans la fenêtre contextuelle, cliquez sur Oui pour redémarrer le robot.
Tester la communication de l’Interface Standard
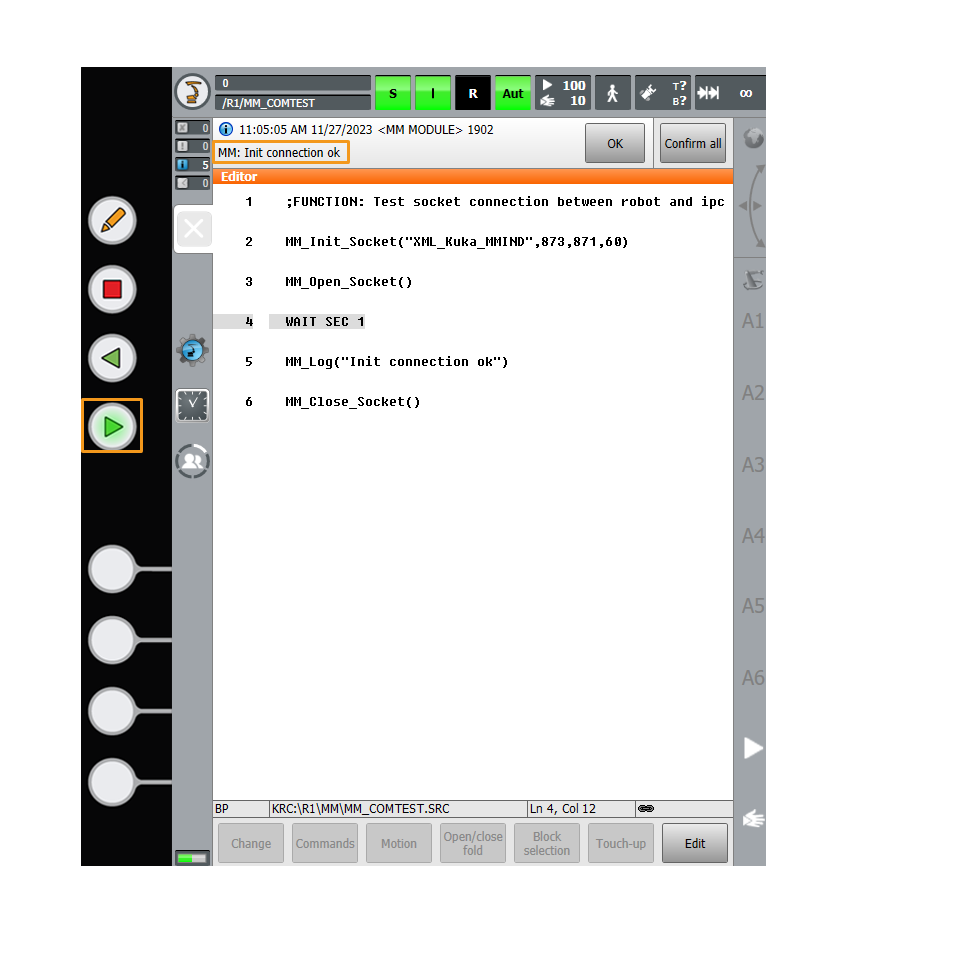
Sélectionner le programme pour tester la communication
-
Suivez les instructions de passage en mode Expert pour passer en mode Administrateur.
-
Ouvrez le dossier
KRC:\R1\mm, sélectionnez MM_COMTEST.src, puis cliquez sur Sélectionner.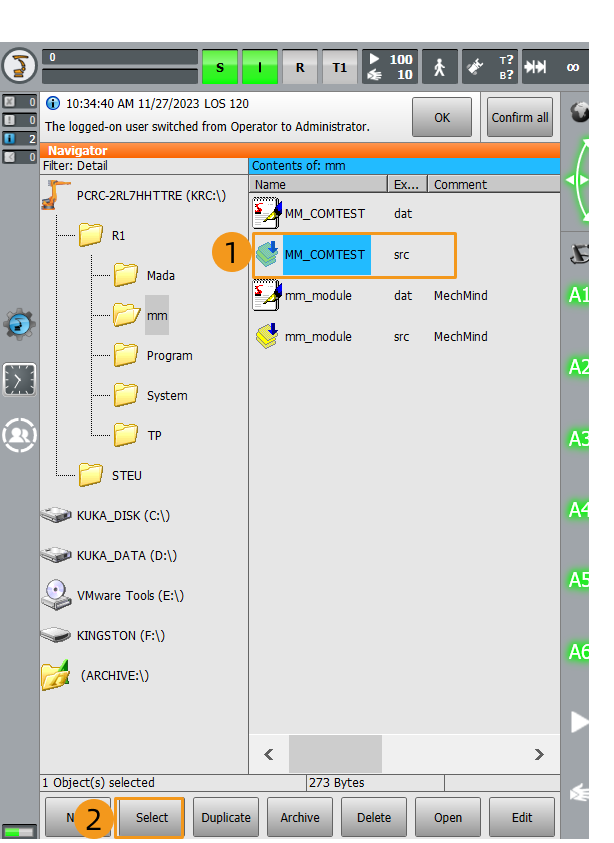
Exécuter le programme et tester la connexion
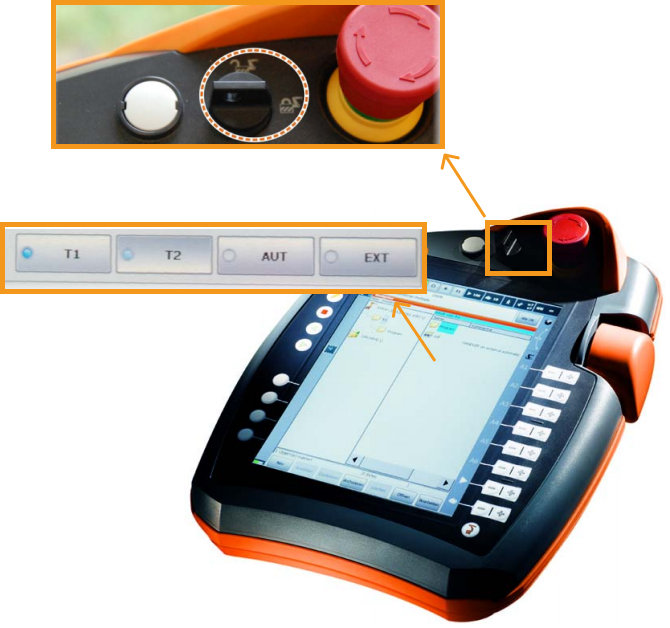
Avant de commencer, nous vous recommandons de consulter les instructions suivantes pour apprendre à basculer entre les modes d’exécution.
Tournez le commutateur à clé en position horizontale sur le pupitre d’enseignement, sélectionnez le mode d’exécution (tel que T1 ou AUT) dans la boîte de dialogue contextuelle, puis remettez le commutateur en position verticale.
| T1 correspond au mode Manuel à vitesse réduite, et AUT correspond au mode Automatique. |
-
Suivez les instructions précédentes pour passer en mode T1.
-
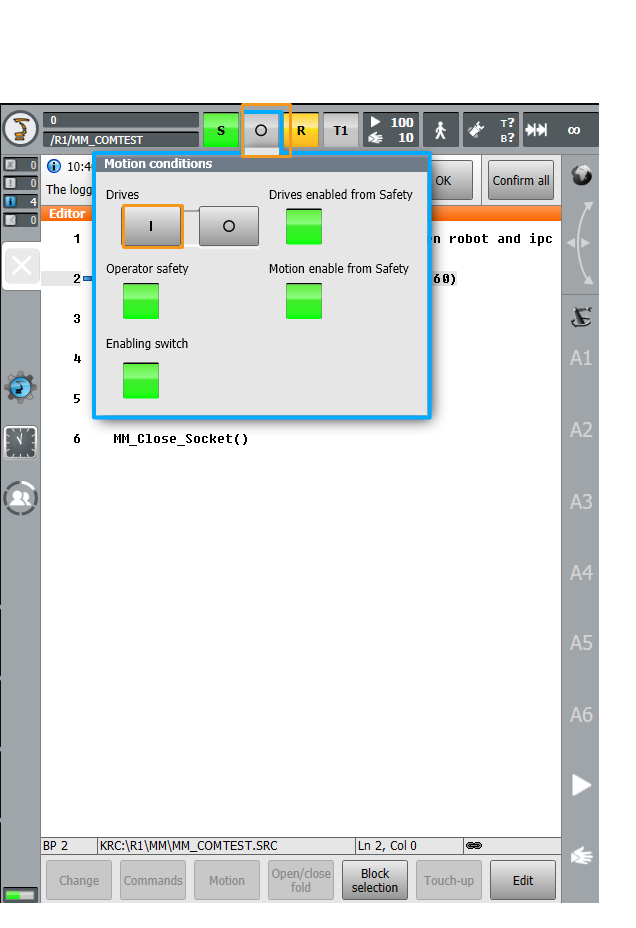
Cliquez sur O. Dans la fenêtre contextuelle, cliquez sur I pour régler Drives sur I. Si Drives est déjà réglé sur I, passez cette étape.
-
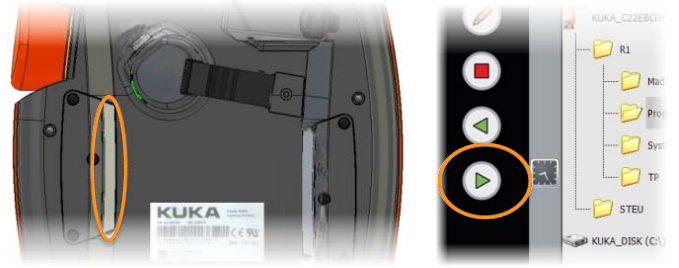
Enfoncez à mi-course le commutateur d’autorisation blanc et appuyez sur le bouton de démarrage vert pour exécuter le programme. Lorsque R devient vert, le programme est en cours d’exécution. Après l’exécution du programme, MM:Init Connection ok s’affiche. Relâchez alors le commutateur d’autorisation et le bouton de démarrage.
-
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.
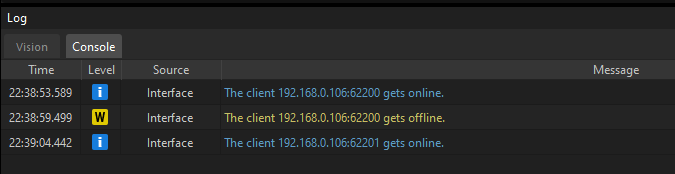
Vous avez maintenant chargé le programme de l’Interface Standard du robot et les fichiers de configuration dans le système du robot afin d’établir la communication via l’Interface Standard entre le système de vision et le robot.