Introduction au décalage du préhenseur
Cette section présente le concept de décalage du préhenseur, ainsi que ses avantages et inconvénients.
Concept de décalage
Le décalage du préhenseur désigne un type de structure de préhenseur. Ce qui suit présente deux types de décalage du préhenseur.
-
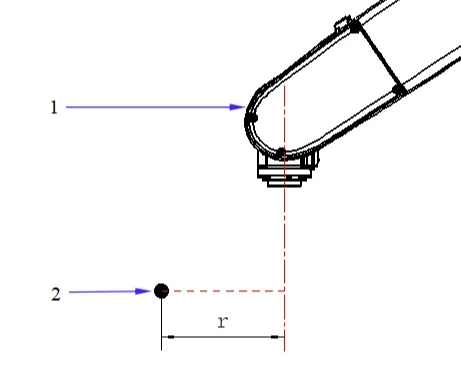
Décalage horizontal du préhenseur
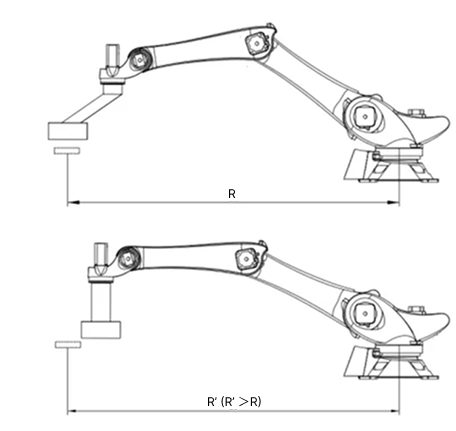
Cela consiste à ajuster la position du préhenseur lors de la prise de l’objet cible de sorte que le préhenseur ait une distance horizontale fixe (c.-à-d. rayon de décalage) par rapport à la pose de la bride du robot. La figure ci-dessous illustre le rayon de décalage « r » dans le plan horizontal entre le point 1 (pose de la bride du robot) et le point 2 (point de prise du préhenseur).
-
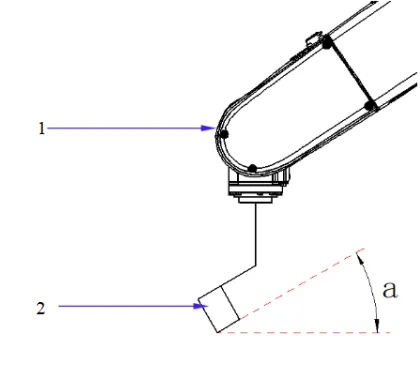
Décalage angulaire du préhenseur
Cela consiste à ajuster l’orientation ou l’angle du TCP lors de la prise de l’objet cible. En faisant pivoter le TCP d’un angle spécifique, le robot peut atteindre des objets nécessitant un angle d’approche non standard. La figure ci-dessous illustre le décalage angulaire entre le point 1 (le robot) et le point 2 (le préhenseur).
Avantages du décalage
Le décalage du préhenseur aide à optimiser les poses de prise du robot, à éviter les interférences et à améliorer la flexibilité et l’efficacité dans des situations complexes en pré-définissant des différences de position ou d’angle dès la conception.
Éviter la singularité du poignet
Dans les projets réels, les objets cibles présentent souvent des formes et des poses variées. Le décalage du préhenseur aide à éviter les singularités lors de la prise.
Dans les figures ci-dessus, le point de prise est à une distance horizontale de la pose de la bride du robot.
Augmenter le taux de vidage du bac en espace limité
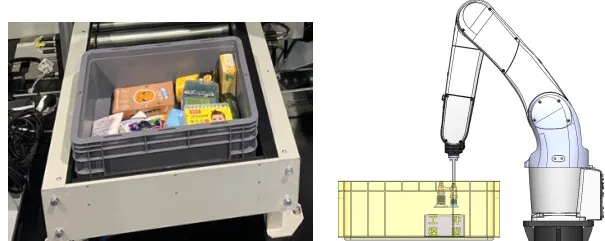
L’espace limité du bac, la taille ou la forme du préhenseur, ainsi que la position de l’objet cible peuvent poser des défis à la prise, impactant le taux de vidage du bac. Lorsqu’on utilise un préhenseur sans décalage, il est sujet à des collisions avec l’environnement. Les figures ci-dessous illustrent un tel cas.
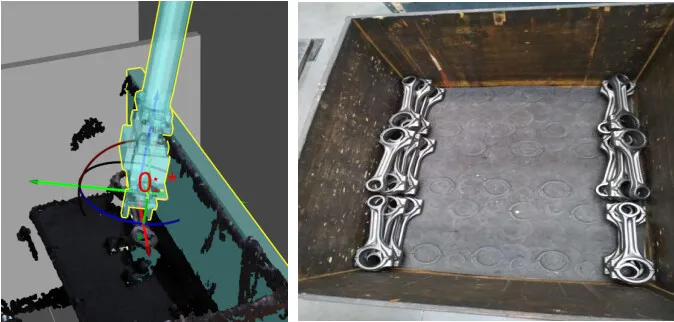
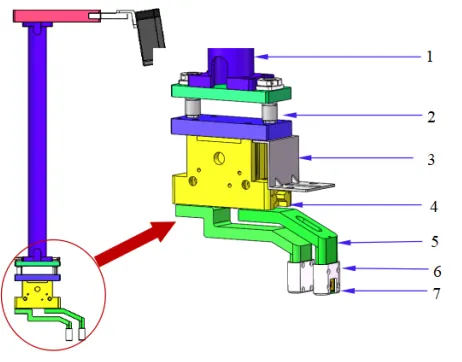
Dans ce cas, vous devez appliquer un décalage au préhenseur, correspondant à la partie verte dans la figure ci-dessous, afin de saisir les objets dans les coins. Éléments sur la figure : 1. Bras d’extension, 2. Dispositif d’amortissement, 3. Support de montage du capteur, 4. Vérin pneumatique du préhenseur, 5. Préhenseur à doigts, 6. Manchon de doigt du préhenseur, 7. Capteur.
Inconvénients du décalage
Lors de la configuration du décalage du préhenseur, les inconvénients suivants doivent également être pris en compte, et une vérification de la prise doit être effectuée.
Charge utile disponible du robot réduite
La charge utile réellement disponible du robot dépend de la courbe de charge du corps du robot et du décalage du préhenseur, et doit être vérifiée afin de garantir que la charge utile avec décalage peut satisfaire aux exigences de prise du projet.
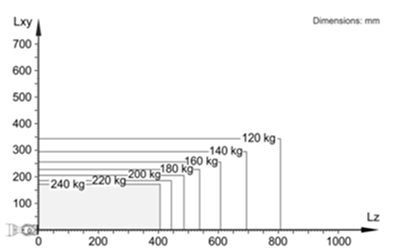
La figure ci-dessous montre l’évolution de la courbe de charge utile à l’extrémité d’un robot. Lxy représente le décalage le long de l’axe X/Y dans le repère de la bride, et Lz représente le décalage le long de l’axe Z dans le repère de la bride.
Lorsque le décalage est supérieur à 250 mm, la charge utile du robot diminue fortement. En revanche, si le décalage est inférieur à 170 mm et augmente jusqu’à 400 mm le long de l’axe Z, la charge utile peut encore être maintenue.
Prise et dépôt limités d’objets cibles avec des poses spécifiques
Dans des scénarios réels, lorsque l’objet cible n’est pas symétrique à 180° selon l’axe Z et qu’il existe une exigence d’orientation pour l’objet cible, si le préhenseur présente un décalage, la prise et le dépôt de l’objet cible seront limités.
Par exemple, dans des scénarios logistiques de sortie, il est souvent exigé que les cartons aient leurs codes-barres orientés vers l’extérieur pour la lecture et la prise manuelles. Si le préhenseur doit aligner un bord spécifique avec une face désignée du carton, le robot peut ne pas parvenir à réaliser l’opération aux limites de son domaine atteignable en raison du décalage du préhenseur.
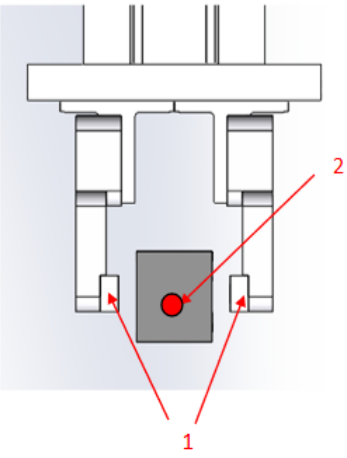
TCP difficile à déterminer lors du serrage du préhenseur
Le TCP au point de serrage du préhenseur se situe au centre de symétrie entre les deux mâchoires de serrage. Il est difficile de définir le TCP côté robot après le décalage du préhenseur.
Comme indiqué dans la figure ci-dessous, 1 est la mâchoire du préhenseur, et 2 est le TCP au point de serrage du préhenseur.