Ajuster les poses (Tri selon la forme en Z)
Ce tutoriel présente d’abord les scénarios d’application et des exemples de tri selon la forme en Z. Il utilise ensuite le projet d’exemple « Ajuster les poses (Tri selon la forme en Z) » comme guide d’application, illustrant comment ajuster les paramètres dans l’étape Ajuster les poses V2. Il fournit également des notes pour des applications réelles.
Scénarios d’application
Le tri selon la forme en Z convient à la dépalettisation de cartons ou au prélèvement d’objets cibles disposés de manière ordonnée. Vous pouvez trier et saisir les objets de la couche supérieure selon la forme en Z.
Exemples d’application
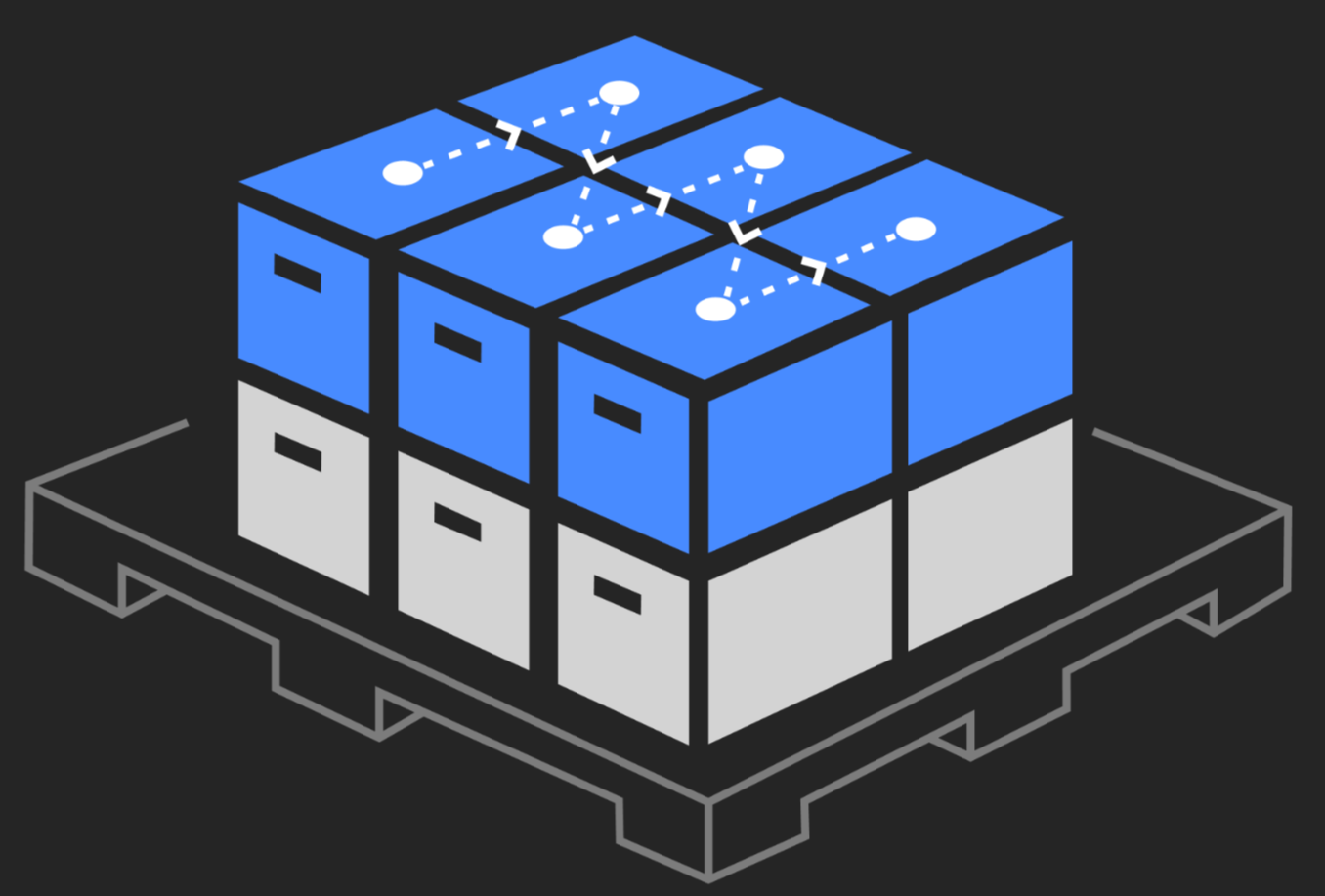
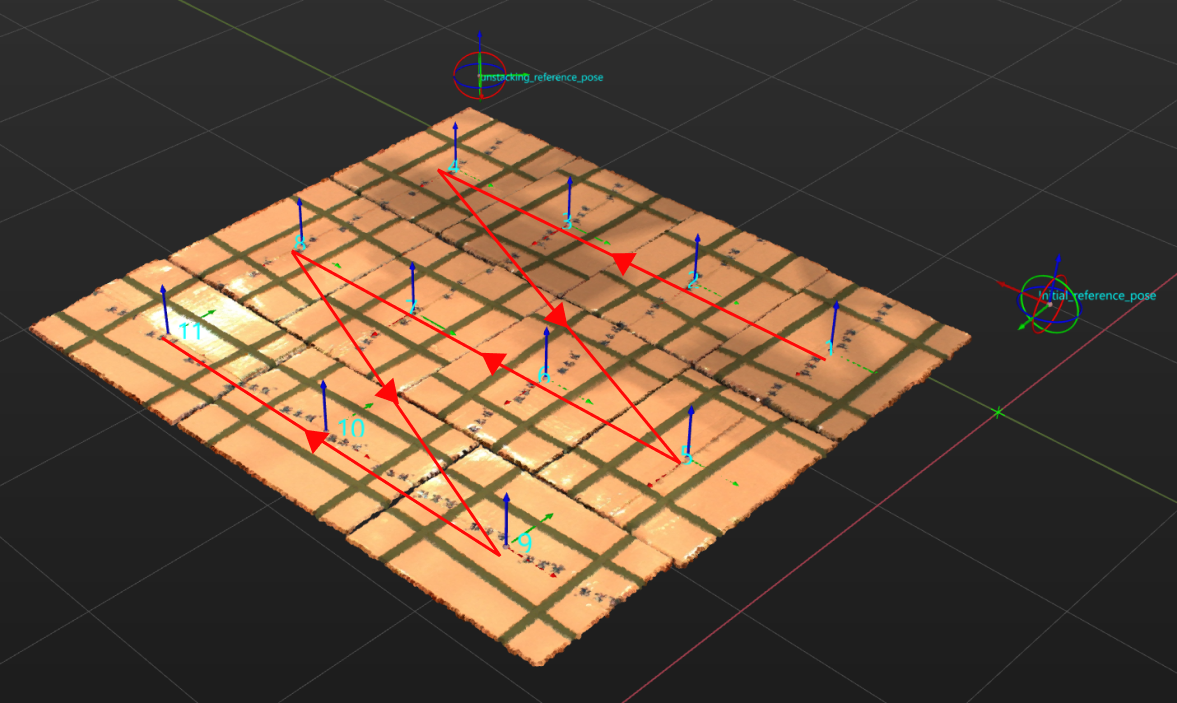
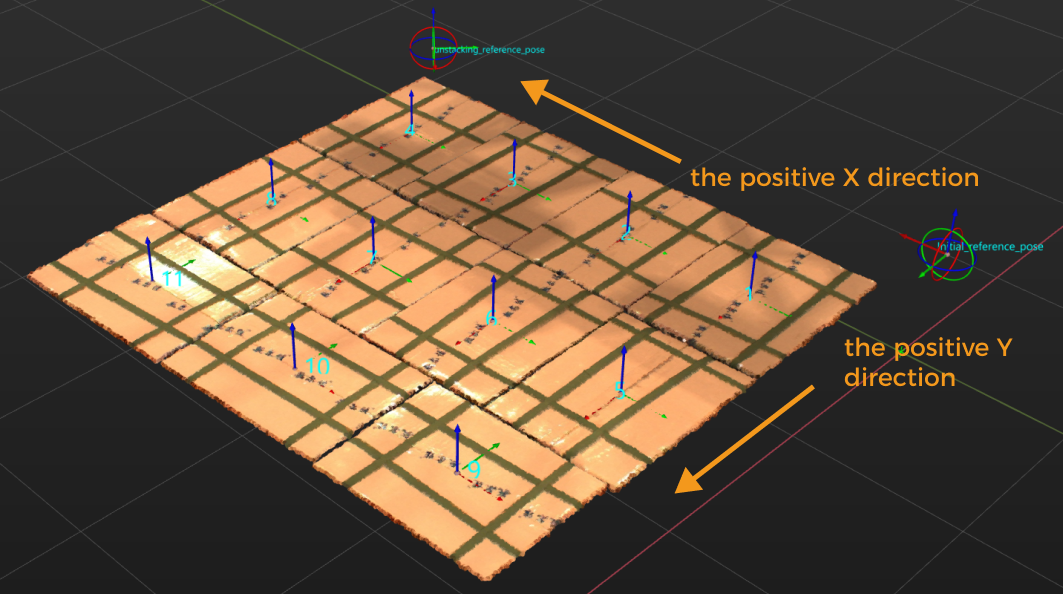
En prenant la dépalettisation de cartons comme exemple, cette section utilise le projet d’exemple « Ajuster les poses (Tri selon la forme en Z) » pour faire saisir les cartons par le robot dans l’ordre en Z, comme indiqué par la flèche sur la figure ci-dessous.
Le robot saisit les cartons comme montré ci-dessous.
Les sections suivantes présentent les consignes d’application et des remarques basées sur cet exemple.
Guide d’application
Après avoir compris les scénarios d’application du tri selon la forme en Z, vous pouvez vous rendre dans la Bibliothèque de solutions pour télécharger le projet correspondant et apprendre à ajuster les paramètres selon le contenu suivant.
Le projet « Ajuster les poses (Tri selon la forme en Z) » se trouve dans la Bibliothèque de solutions Mech-Vision. Vous pouvez aller dans la catégorie d’exemples pratiques pour obtenir les ressources et créer le projet. Après avoir créé le projet, cliquez sur l’étape Ajuster les poses V2, puis cliquez sur le bouton Assistant de configuration pour ouvrir le outil d’ajustement de pose et ajuster les paramètres. Cette configuration se compose de trois flux de travail : ajustement de pose, règles de traitement et paramètres généraux.

-
Ajustement de pose : règle les orientations des poses.
-
Règles de traitement : trie les poses selon les besoins réels et filtre les poses non admissibles.
-
Paramètres généraux : fournit des réglages autres que le traitement des poses. Actuellement, cette étape ne prend en charge que le tri d’autres données (comme les dimensions des cartons) avec les poses correspondantes.
La section suivante présente les paramètres clés à ajuster dans chaque flux de travail.
Ajustement de pose
-
Sélectionnez la méthode d’ajustement de l’orientation.
Pour ajuster automatiquement les poses des objets afin que les axes Z soient orientés vers le haut, il est recommandé de définir Orientation sur Alignement automatique.
Pour la description des options d’orientation, consultez Ajuster l’orientation de la pose.
-
Sélectionnez le scénario d’application.
Pour garantir que les orientations de l’axe X des poses soient aussi uniformes que possible, ce qui évite des mouvements supplémentaires du robot lors de la saisie des cartons, définissez Scénario d’application sur Palettisation et dépalettisation de cartons.
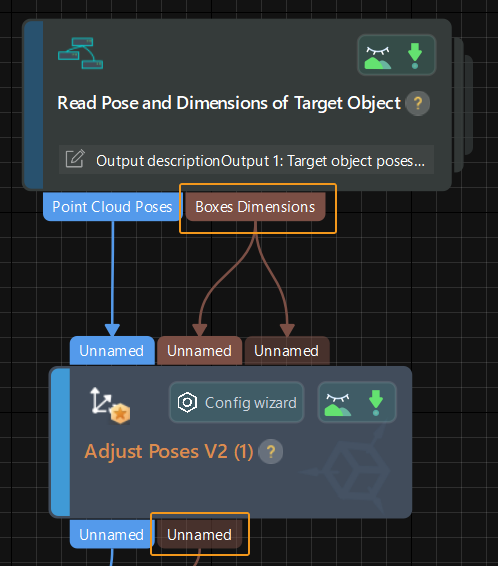
Une fois Palettisation et dépalettisation de cartons sélectionné, un port d’entrée sera ajouté à l’étape Ajuster les poses V2. Connectez ce port au port de sortie Dimensions des cartons de l’étape Lire la pose et les dimensions de l’objet cible pour saisir les dimensions des cartons.
-
Déterminez la forme du carton.
Le paramètre Seuil de jugement de taille carrée détermine si la surface du carton est carrée. Lorsque la différence entre la longueur et la largeur saisies du carton dans Ajuster les poses V2 est inférieure au seuil, la surface du carton est considérée comme carrée. Vous pouvez définir la valeur du paramètre selon les besoins réels.
Après avoir défini le Seuil de jugement de taille carrée, cliquez sur le bouton Obtenir des données, et l’outil obtiendra automatiquement la taille et la pose du carton et ajustera la pose.
-
Sélectionnez la direction cible pour l’ajustement de la pose.
Dans ce scénario, les cartons sont décalés. Pour garantir un mouvement de rotation minimal du robot lors de la saisie des cartons, réglez la valeur de Définir la direction cible sur Glisser avec le manipulateur de pose et la valeur de Orientation sur Direction X positive.
Après avoir configuré le flux de travail d’ajustement de pose, cliquez sur le bouton Suivant pour accéder à la page des règles de traitement.
Règles de traitement
-
Sélectionnez le type de tri.
Sélectionnez Trier par forme Z sur le plan.
-
Définissez la pose de référence.
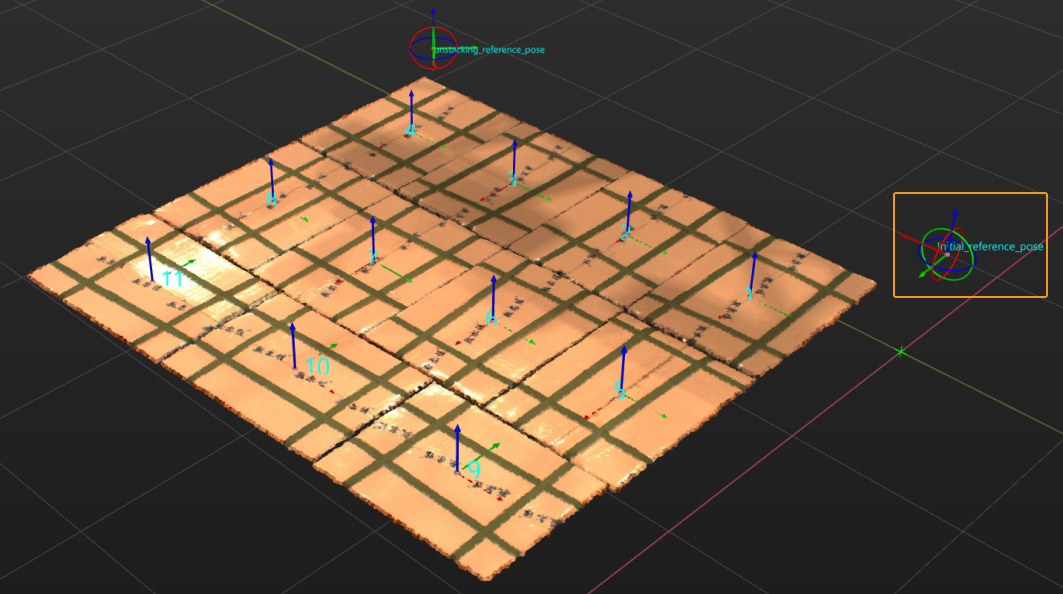
Pour déterminer le point de départ du prélèvement, vous devez définir la pose de référence. Pour des instructions détaillées sur la définition de la pose de référence, consultez Définir la pose de référence. Dans le scénario de dépalettisation, les objets entrants sont à une position fixe, c’est-à-dire que le point de départ du prélèvement est fixe, qui correspond au carton en haut à droite dans ce projet d’exemple. Par conséquent, vous devez sélectionner Glisser avec le manipulateur de pose et définir la pose de référence au coin supérieur droit. Dans des scénarios réels, définissez la pose de référence en fonction du point de départ réel du prélèvement.
-
Définissez les directions des lignes/colonnes.
Pour garantir la séquence de prélèvement optimale, vous devez définir la Direction de ligne et la Direction de colonne lors de la saisie des cartons.
Dans ce projet d’exemple, la pose de référence se trouve en haut à droite, donc la Direction de ligne est définie sur Axe X positif de la pose de référence et la Direction de colonne est définie sur Axe Y positif de la pose de référence afin d’assurer la séquence de prélèvement optimale. Dans des scénarios réels, déterminez les directions des lignes/colonnes selon le point de départ réel du prélèvement.
-
Définissez l’intervalle de ligne.
L’intervalle de ligne correspond à l’espace entre les lignes lorsque les poses sont triées selon la forme en Z sur le plan. Définissez ce paramètre en fonction de l’intervalle entre les lignes d’objets dans le scénario réel.
Après avoir configuré les règles de traitement, cliquez sur le bouton Suivant pour ouvrir la page des paramètres généraux.
Paramètres généraux
Dans ce projet d’exemple, pour trier et sortir ensemble les dimensions des cartons et les poses, la valeur du paramètre Définir le nombre de nouveaux ports doit être réglée sur 1. Après l’ajustement du paramètre, un nouveau port d’entrée et de sortie sera ajouté à l’étape Ajuster les poses V2 pour la saisie et la sortie des dimensions des cartons.
Dans ce cas, vous devez connecter le port de sortie « Dimensions des cartons » de l’étape Lire la pose et les dimensions de l’objet cible au nouveau port d’entrée de l’étape Ajuster les poses V2, connecter le nouveau port de sortie de l’étape Ajuster les poses V2 au port d’entrée de l’étape suivante, puis cliquer sur le bouton Obtenir des données.
| Si aucune autre donnée n’a besoin d’être triée, ne modifiez pas la valeur du paramètre Définir le nombre de nouveaux ports. |
Vous avez maintenant ajusté les paramètres pertinents. Cliquez sur le bouton Enregistrer pour enregistrer les modifications.
Notes
Dans des applications réelles, veuillez comprendre et suivre les précautions suivantes, puis ajoutez l’étape Ajuster les poses V2 à votre projet et connectez les flux de données pour trier rapidement les poses selon la forme en Z.
-
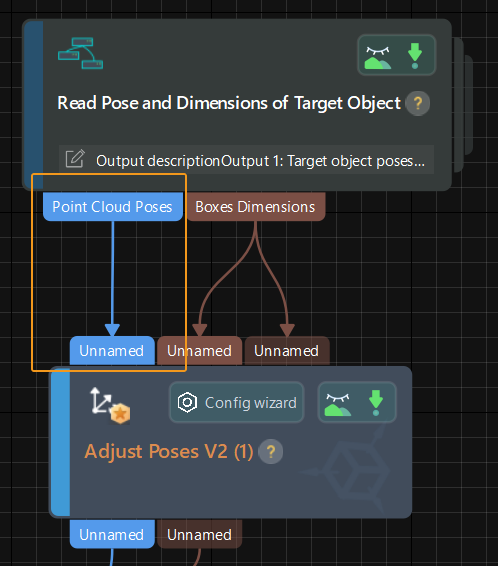
L’étape Ajuster les poses V2 doit être précédée d’une étape ou d’une procédure, telle que la procédure Lire la pose et les dimensions de l’objet cible, qui reconnaît les poses des objets et sort les poses de tous les objets de la couche supérieure. Le port de sortie de pose de cette étape ou procédure se connecte au port d’entrée de pose de l’étape Ajuster les poses V2 pour le tri des poses.
-
L’étape Ajuster les poses V2 doit être suivie d’une étape avec un port d’entrée de pose, telle que les étapes Planification de trajectoire et Sortie, pour sortir les poses ajustées, afin que le robot puisse saisir les cartons selon la forme en Z.
-
Pour les scénarios de dépalettisation, le projet doit contenir une étape pour sortir les dimensions des cartons afin de déterminer la forme du carton.