Autres problèmes
Cette section traite d’autres problèmes que vous pouvez rencontrer concernant la reconnaissance d’objets cibles et fournit des instructions pour les résoudre.
Comment garantir que l’orientation selon l’axe X de la pose d’un objet symétrique est cohérente avec celle du modèle de nuage de points ?
-
Pour les objets à symétrie circulaire, tels que les anneaux, les réglages suivants sont requis.
-
Il n’est pas nécessaire de définir la symétrie dans « Paramètres du modèle de nuage de points » de l’éditeur d’objets cibles. En d’autres termes, désactivez simplement l’option Configurer le modèle de nuage de points.

-
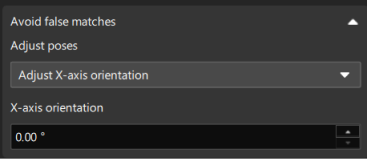
Dans le processus « Sélection et reconnaissance de l’objet cible » de l’outil « Reconnaissance d’objets cibles 3D », activez le Mode avancé et configurez les réglages suivants sous « Ajuster ou filtrer les poses issues de l’appariement grossier ». Orientation selon l’axe X est 0, indiquant que la direction cible est la direction de l’axe X de la pose du modèle de nuage de points.
-
-
Pour les objets sans symétrie circulaire, tels que des objets rectangulaires présentant une symétrie de rotation de 180°, les réglages suivants sont requis.
-
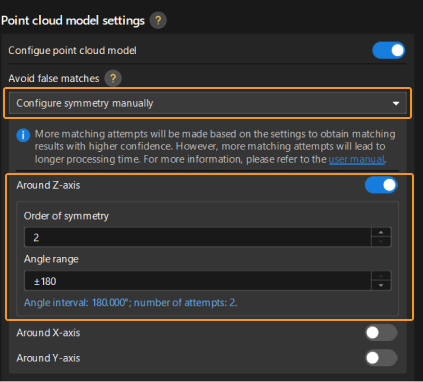
Dans « Paramètres du modèle de nuage de points » de l’éditeur d’objets cibles, définissez « Calculer les poses pour filtrer les correspondances » sur Configurer la symétrie manuellement. Ensuite, activez Autour de l’axe Z/Y/X et définissez Ordre de symétrie et Plage d’angle.
-
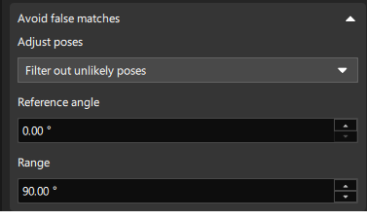
Dans le processus « Sélection et reconnaissance de l’objet cible » de l’outil « Reconnaissance d’objets cibles 3D », activez le Mode avancé et configurez les réglages suivants sous « Ajuster ou filtrer les poses issues de l’appariement grossier ». Un Angle de référence de 0° signifie que la direction cible est la direction de l’axe X de la pose du modèle de nuage de points. La Plage doit être définie à la moitié de l’angle de symétrie de rotation. Par exemple, si l’angle de symétrie de rotation d’un objet est de 180°, la plage doit être définie à 90°.
-