Vérifier si la précision absolue du robot a diminué
Cet article vous guide pour vérifier rapidement si la précision absolue du robot a diminué.
Mech-Vision est un outil de vérification de la précision absolue du robot, facilitant le dépannage rapide des problèmes de précision absolue du robot.
Sélectionnez le dans la barre de menus, puis sélectionnez dans la fenêtre Analyse des erreurs.
Vérifier la perte de position zéro du robot
Méthode de vérification:
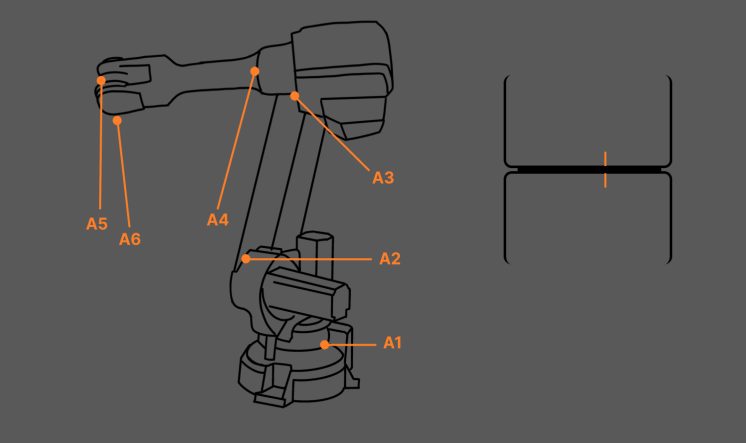
Après avoir ramené le robot à sa position zéro standard, vérifiez si les lignes de graduation sur chaque axe sont alignées.
Critères de vérification:
-
Lorsque les lignes de graduation de la position zéro ne présentent pas de déviations significatives, vous pouvez vérifier en plus la cohérence entre la valeur sur le boîtier d’apprentissage et la valeur d’usine.
-
Si les lignes de graduation sont fortement désalignées, cela indique une perte des positions zéro du robot et un réétalonnage est nécessaire.
Étalonner les positions zéro:
Reportez-vous au manuel d’utilisation du robot pour des instructions sur l’étalonnage des positions zéro ou contactez le fabricant du robot pour obtenir de l’assistance.
Vérifier si l’erreur de distance de déplacement devient plus importante
Utilisez le boîtier d’apprentissage pour contrôler le robot afin qu’il se déplace d’une certaine distance le long d’une direction fixe (par exemple, X ou Y) dans l’espace de travail. Après le déplacement, comparez la distance théorique avec la distance réelle parcourue par le robot et mesurez la différence.
Méthode de vérification:
-
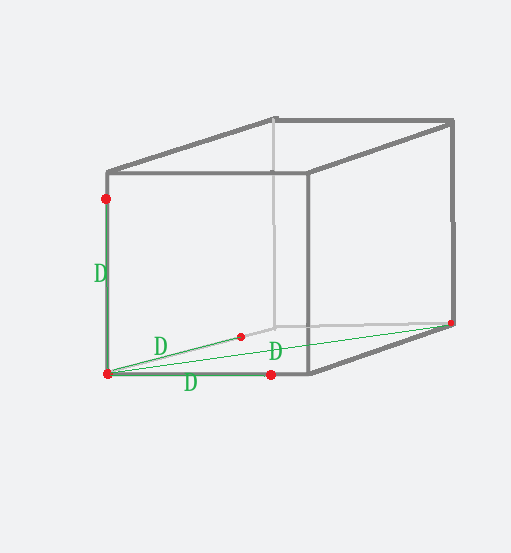
Sélectionnez deux points respectivement sur les axes X/Y/Z et sur les diagonales. Enregistrez la distance de déplacement du robot (D) sur le boîtier d’apprentissage et mesurez la distance réelle (D') avec une règle. Comparez ensuite les différences.
-
Il est recommandé de mesurer dans les trois directions (XYZ) et à différentes positions.
Critères de vérification:
Plus la différence globale est faible, plus l’erreur de distance de déplacement est réduite, et plus la précision absolue du robot est élevée.
Comparez l’erreur de distance de déplacement avec celle enregistrée lors de la phase de déploiement de l’application.
-
Si l’erreur n’augmente pas de manière significative, la précision absolue du robot peut être utilisée. Poursuivez le dépannage conformément à Approche de résolution des erreurs de picking.
-
Si l’erreur augmente, la précision absolue du robot diminue. L’erreur de précision du robot est l’une des principales sources d’erreur conduisant au problème d’imprécision du picking. Contactez le fabricant du robot pour étalonner la précision absolue du robot.
Confirmer la précision du TCP du robot
Méthode de vérification:
Utilisez le outil d’analyse des erreurs pour évaluer la précision du TCP.
Les instructions sont présentées dans l’illustration ci-dessous.
Critères de vérification:
-
Si la pointe fixée à la bride du robot coïncide avec une autre pointe, la précision du TCP est bonne.
-
S’il y a une grande déviation, la précision du TCP est médiocre. Contactez le fabricant du robot pour étalonner le TCP.