Ajuster les poses (hauteur)
Ce tutoriel présente d’abord les scénarios d’application et des exemples de tri des poses selon leurs valeurs Z. Il utilise ensuite le projet d’exemple « Ajuster les poses (hauteur) » comme guide d’application, illustrant comment ajuster les paramètres dans la Ajuster les poses V2 Étape. Il fournit également des notes pour des applications réelles.
Scénarios d’application
Le tri selon les valeurs Z des poses convient aux scénarios où les objets cibles doivent être triés et saisis en fonction de la hauteur de leurs poses. Saisir en premier les objets ayant des valeurs Z plus élevées peut améliorer le taux de réussite de la préhension.

Exemples d’application
Cette section prend le chargement d’anneaux comme exemple et utilise le projet d’exemple « Ajuster les poses (hauteur) » pour trier les objets cibles selon les valeurs Z de leurs poses avant la préhension.
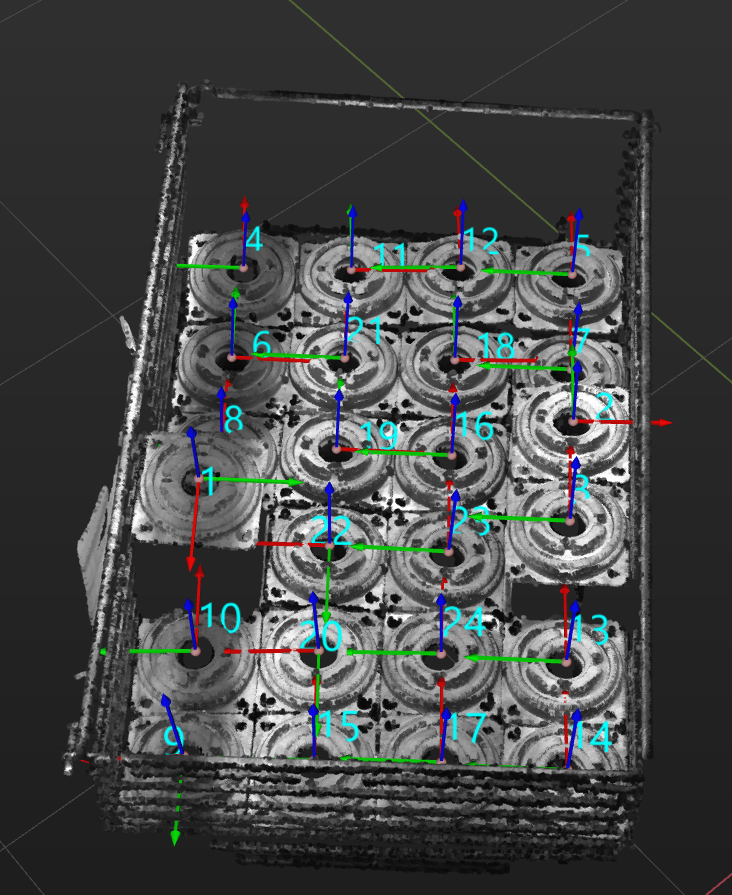
Le robot saisit des anneaux comme illustré ci-dessous.
Les sections suivantes présentent les conseils d’application et les notes basés sur cet exemple.
Guide d’application
Après avoir compris les scénarios d’application du tri des poses par valeurs Z, vous pouvez vous rendre dans la Bibliothèque de solutions pour télécharger le projet correspondant et apprendre à ajuster les paramètres selon le contenu suivant.
Le projet « Ajuster les poses (hauteurs) » se trouve dans la Bibliothèque de solutions Mech-Vision. Vous pouvez accéder à la catégorie d’exemples pratiques pour obtenir les ressources et créer le projet. Après avoir créé le projet, cliquez sur l'Ajuster les poses V2 Étape, puis cliquez sur le bouton Assistant de configuration pour ouvrir l’outil d’ajustement de pose et ajuster les paramètres. Cette configuration comprend trois workflows: ajustement de pose, règles de traitement et paramètres généraux.

-
Ajustement de pose: ajuste les orientations des poses.
-
Règles de traitement: trie les poses selon le besoin réel et filtre les poses non conformes.
-
Paramètres généraux: fournit des paramètres autres que le traitement des poses. Actuellement, cette étape ne prend en charge que le tri d’autres données (telles que les dimensions du carton) conjointement avec les poses correspondantes.
La section suivante présente les paramètres clés à ajuster dans chaque workflow.
Ajustement de pose
-
Sélectionner la méthode d’ajustement de l’orientation.
Pour ajuster automatiquement les poses des objets de sorte que les axes Z soient orientés vers le haut, il est recommandé de définir Orientation sur Alignement automatique.
Pour des descriptions des options d’orientation, consultez Ajuster l’orientation de la pose.
-
Sélectionner le scénario d’application.
Pour garantir que les orientations de l’axe Z des poses soient aussi uniformes que possible, ce qui facilite le tri, définissez le Scénario d’application sur Aligner les axes Z (alimentation de machine).
Après avoir configuré le workflow d’ajustement de pose, cliquez sur le bouton Suivant pour accéder à la page des règles de traitement.
Règles de traitement
Type de tri
-
Sélectionner le type de tri.
Sélectionnez Trier par valeur X/Y/Z de la pose.
-
Définir la valeur spécifiée de la pose.
Dans ce projet d’exemple, les objets cibles sont triés par la hauteur de leurs poses puis saisis; la Coordonnée Z est donc sélectionnée.
-
Sélectionner l’ordre de tri.
Lors de la préhension des objets cibles, ceux dont la hauteur de pose est la plus élevée doivent être saisis en premier; vous devez donc sélectionner Descendant.
Filtrer les poses
-
Sélectionner l’axe à spécifier.
Sélectionnez Axe Z pour calculer l’angle entre celui-ci et la direction cible.
-
Définir la direction cible.
Sélectionnez repère du robot pour l’utiliser comme pose de référence.
-
Sélectionner l’orientation.
Sélectionnez Direction Z positive.
-
Définir la différence angulaire maximale.
Dans ce projet d’exemple, définissez la valeur à 30°. Lorsque l’angle entre l’axe spécifié (c.-à-d. l’axe Z) de la pose et la direction cible (c.-à-d. le repère du robot) est inférieur à 30°, la pose sera conservée.
| Ajustez la valeur de la différence angulaire maximale selon les exigences réelles. Lorsque les objets cibles sont bien rangés dans le plan horizontal, définissez une valeur relativement petite; lorsque les objets cibles sont placés aléatoirement, vous pouvez augmenter légèrement la valeur. |
Après avoir configuré les règles de traitement, cliquez sur le bouton Suivant pour ouvrir la page des paramètres généraux.
Paramètres généraux
Dans le scénario de chargement d’anneaux, il n’est pas nécessaire de trier et de produire d’autres données; vous n’avez donc pas besoin de configurer les paramètres généraux.
Vous avez maintenant ajusté les paramètres pertinents. Cliquez sur le bouton Enregistrer pour sauvegarder les modifications.
Notes
Dans les applications réelles, veuillez comprendre et suivre les précautions suivantes; ajoutez ensuite l'Ajuster les poses V2 Étape à votre projet, et connectez les flux de données pour trier rapidement les poses en fonction de leur hauteur.
-
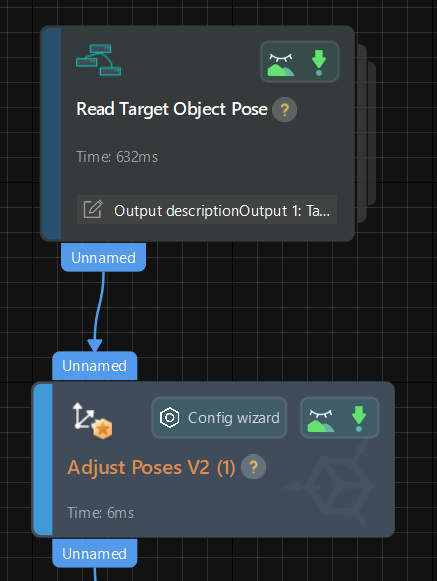
L'Ajuster les poses V2 Étape doit être précédée d’une Étape ou d’une Procédure, telle que la Lire la pose de l’objet cible Procédure, qui reconnaît les poses des objets et produit correctement les poses du centre de l’objet à trier dans le repère de référence de la caméra. Le port de sortie des poses de cette Étape ou Procédure se connecte au port d’entrée des poses de l'Ajuster les poses V2 Étape pour le tri des poses.
-
L'Ajuster les poses V2 Étape doit être suivie d’une Étape avec un port d’entrée de poses, telle que les Étapes Planification de trajectoire et Sortie, afin de produire les poses ajustées, de sorte que le robot puisse saisir les anneaux selon la hauteur de leurs poses.