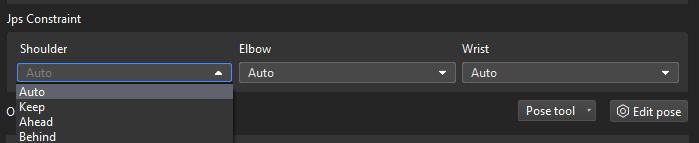
Contrainte JPs
Définition des termes
| Épaule |
La relation de position relative entre le centre du poignet et Axis1. Axis1 désigne l’axe du centre de rotation de l’axe 1 du robot. |
| Coude |
Relation de position relative entre le poignet et l’avant-bras, c’est-à-dire la ligne reliant les centres de rotation des axes 2 et 3 du robot. |
| Poignet |
Le poignet correspond à l’axe 5 du robot. Des JPs de poignet négatifs indiquent que le poignet du robot peut tourner dans le sens négatif. |
Liste des valeurs
| Automatique |
Il n’y a pas de contrainte sur le mouvement de cette articulation. La solution optimale est celle dans laquelle chaque axe tourne le moins. |
| Maintenir |
Contraindre la prochaine solution de JPs selon l’état actuel des JPs. Par exemple, si le JP actuel de l’axe 3 est positif, seules les solutions dans lesquelles le JP de l’axe 3 est positif seront prises en compte pour le prochain point de passage. |
| Devant |
Le centre du poignet est devant l’axe 1. |
| Derrière |
Le centre du poignet est derrière l’axe 1. |
Après avoir cliqué sur  , une fenêtre affichant toutes les solutions de JPs pour la pose actuelle apparaîtra.
Après avoir cliqué sur l’une des solutions, la pose correspondante de la solution sera affichée dans la zone de simulation 3D. Ainsi, vous connaîtrez les solutions possibles sous différentes contraintes, comme illustré ci-dessous.
, une fenêtre affichant toutes les solutions de JPs pour la pose actuelle apparaîtra.
Après avoir cliqué sur l’une des solutions, la pose correspondante de la solution sera affichée dans la zone de simulation 3D. Ainsi, vous connaîtrez les solutions possibles sous différentes contraintes, comme illustré ci-dessous.
-
Les paramètres de contrainte JPs s’appliquent uniquement aux robots à 6 axes. On considère que les robots à 4 axes n’ont pas de positions d’épaule, de coude ou de poignet anormales.
-
Relative Move, Custom Pallet Pattern et Predefined Pallet Pattern ne prennent pas en charge les paramètres de contrainte JPs. Des paramètres de contrainte JPs par défaut sont définis pour ces étapes, c’est-à-dire que les statuts de l’épaule, du coude et du poignet ne changeront pas, et le mouvement du robot ne change pas de système de solution (ne passe pas par des singularités).