Type de point de passage
Description du type de point de passage
TCP |
Le point de passage sera représenté par les valeurs X, Y, Z, des angles d’Euler, des quaternions ou des vecteurs de rotation dans le repère de l’outil.
|
JPs |
Le point de passage sera représenté par les positions articulaires du robot.
|
Pose de l’objet cible |
Le point de passage sera représenté par les valeurs X, Y, Z, des angles d’Euler, des quaternions ou des vecteurs de rotation dans le repère de l’objet. Elle se concentre sur la description de la position et de l’orientation des objets cibles réels à manipuler ou traiter lorsque le robot exécute des tâches.
|
| Lorsque le type de point de passage est défini sur Pose de l’objet cible, veuillez ne pas ajuster les points de préhension à l’aide des Étapes d’ajustement de la pose dans Mech-Vision, car cela peut entraîner une préhension imprécise. |
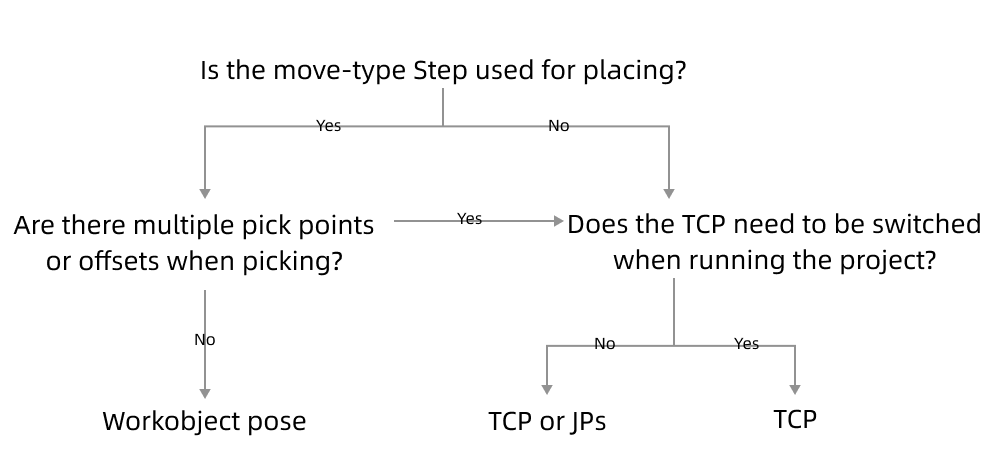
La méthode pour déterminer le type de point de passage est illustrée dans la figure ci-dessous.
Description des paramètres
Outil de pose |
Transformer la pose |
Transformer la pose actuelle en une nouvelle. Convient aux réglages fins. |
Rectifier la pose |
Définir les coordonnées de P1, P2 et P3 conformément aux instructions, puis rectifier la pose de l’objet par la méthode des trois points. Elle convient aux scénarios où les objets sont inclinés et leur pose ne peut pas être déterminée aisément. Par exemple, lorsqu’un parallélépipède s’incline, sa pose est difficile à déterminer. Rectifier la pose peut être utilisé ici pour calculer la pose du parallélépipède, et le robot peut ainsi se déplacer vers la pose rectifiée. |
|
Modifier la pose |
Saisir directement des quaternions ou des angles d’Euler pour ajuster la pose. Vous pouvez également copier et coller la pose. |
|
Modifier les JPs |
Similaire à la fonction Modifier la pose. Vous pouvez copier et coller les JPs en radians ou en degrés. |
|
Définir le point de passage |
Lire la pose actuelle du robot simulé et la définir comme point de passage. |
|
Déplacer le robot simulé |
Déplacer le robot simulé vers la pose définie dans le point de passage actuel. |
|
Afficher toutes les JPs |
Afficher toutes les solutions de positions articulaires correspondant au point de passage actuel. |
|
Enseigner la pose de l’objet cible |
Enregistrer la pose de l’objet cible obtenue en déplaçant manuellement le robot. |
|