Cadre de construction de projet
Dans cette section, un projet simple de reconnaissance d’objet cible sera construit à titre d’exemple pour vous présenter le cadre de construction de projet.
Comprendre le cadre du projet
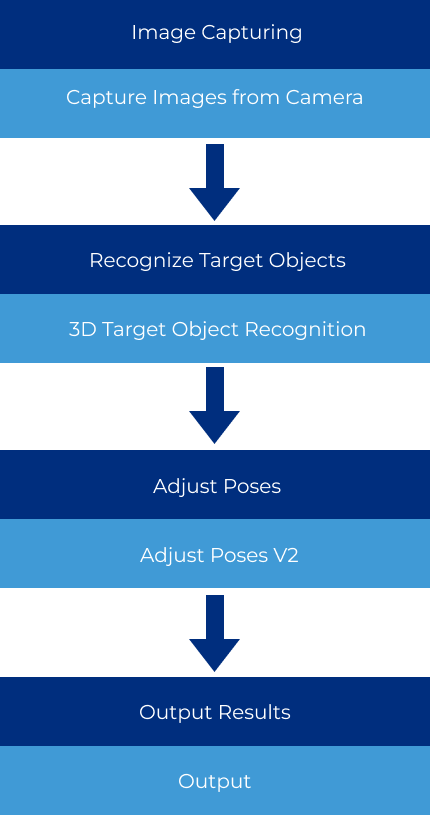
La reconnaissance d’objet cible comprend généralement quatre processus : capturer des images, reconnaître les objets cibles, ajuster les poses et produire les résultats. Chaque processus correspond à différentes Étapes, qui sont:Capture d’images depuis la caméra, Reconnaissance d’objet cible 3D, Ajustement des poses V2, et Sortie.
Construire le projet
Créer et enregistrer la solution
Vous pouvez vous référer à Créer et enregistrer la solution.
Connecter et ajouter des Étapes
Après avoir compris le cadre du projet et créé la solution, vous pouvez commencer à ajouter et connecter des Étapes et à construire le projet.
-
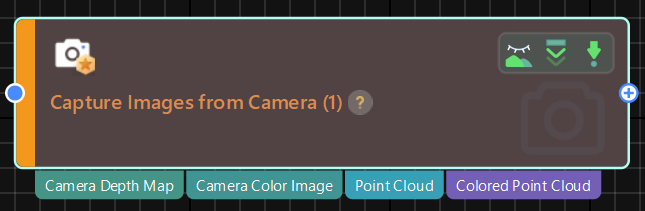
Ajouter l’Étape « Capture d’images depuis la caméra ».
Cette Étape peut déclencher la caméra pour capturer des images et acquérir les données d’image de l’objet cible pour la reconnaissance ultérieure de l’objet cible.
-
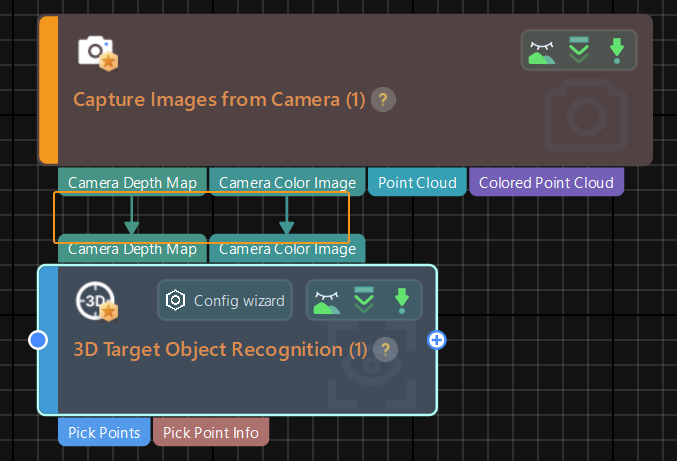
Ajouter l’Étape « Reconnaissance d’objet cible 3D ».
Cette Étape intègre des fonctions de traitement visuel telles que le prétraitement du nuage de points, l’appariement 3D et la suppression des objets superposés, ce qui facilite une reconnaissance rapide des objets cibles.
Placez l’Étape sous l’Étape « Capture d’images depuis la caméra », et connectez entre eux les ports « Carte de profondeur de la caméra » et « Image couleur de la caméra » des deux Étapes. Comme indiqué ci-dessous, vous avez maintenant ajouté l’Étape « Reconnaissance d’objet cible 3D » et fourni les données nécessaires.
-
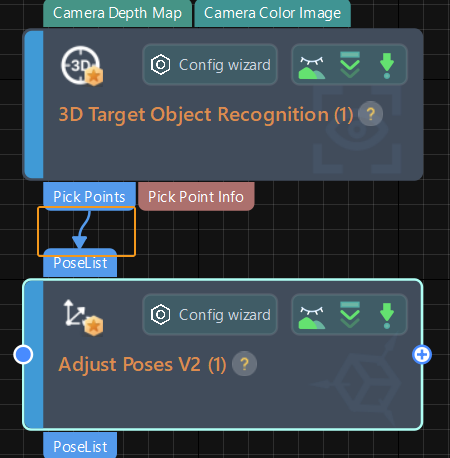
Ajouter l’Étape « Ajustement des poses V2 ».
Cette Étape vous permet de manipuler les poses en entrée de l’Étape « Reconnaissance d’objet cible 3D », notamment de les transformer dans le repère de référence du robot, ainsi que d’effectuer des opérations de translation, de rotation et de tri.
Placez l’Étape sous l’Étape « Reconnaissance d’objet cible 3D » et connectez entre eux les ports « Points de préhension » des deux Étapes.
-
Ajouter l’Étape « Sortie ».
Cette Étape peut envoyer les résultats de vision du projet en cours à Mech-Viz ou à des composants de communication pour des tâches de prélèvement ultérieures.
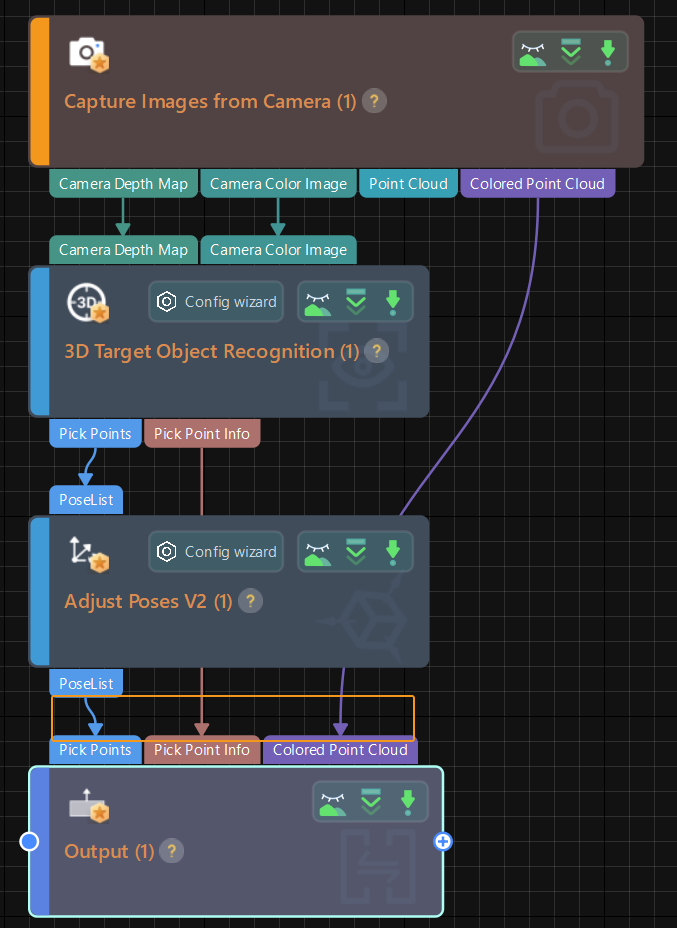
Étant donné que l’Étape « Sortie » affiche par défaut des ports liés à la planification de trajectoire et que ce projet nécessite la sortie de données relatives aux points de préhension de l’objet cible, vous devez régler le Type de port de l’Étape sur Prédéfini (résultat de vision) dans le panneau Paramètres de l’Étape.
Après avoir ajusté le paramètre de l’étape, placez l’Étape « Sortie » sous l’Étape « Ajustement des poses V2 » et connectez entre eux les ports « Points de préhension » des deux Étapes. En outre, connectez respectivement le port de sortie « Informations sur le point de préhension » de l’Étape « Reconnaissance d’objet cible 3D » et le port de sortie « Nuage de points coloré » de l’Étape « Capture d’images depuis la caméra » à l’Étape « Sortie ».
À ce stade, vous avez construit un projet simple de reconnaissance d’objet cible. Vous pouvez utiliser le raccourci Ctrl + S ou aller dans dans la barre de menus pour enregistrer le projet.
|
Après avoir ajouté et connecté toutes les Étapes, vous pouvez organiser la disposition des Étapes pour rendre la logique du flux de données plus claire. Il existe trois façons d’organiser la disposition des Étapes:
|
Une fois la construction du projet terminée, vous pouvez commencer à exécuter et déboguer le projet.