뎁스 맵을 포인트 클라우드로 전환하기
기능
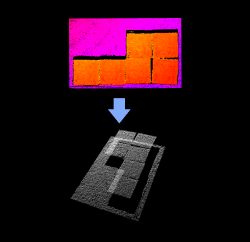
이 스텝에서는 뎁스 맵과 컬러 맵을 기반으로 포인트 클라우드를 생성합니다.
|
유사한 스텝과의 비교: 카메라에서 이미지를 캡처하기 스텝도 포인트 클라우드와 컬러 포인트 클라우드를 직접 출력할 수 있습니다. 그러나 프로젝트 실행 속도를 향상시키기 위해 일반적으로 뎁스 맵을 포인트 클라우드로 전환하기 스텝을 사용하여 포인트 클라우드 및 컬러 포인트 클라우드를 획득합니다. 뎁스 맵을 포인트 클라우드로 전환하기 스텝을 사용해 ROI를 선택하여 불필요한 포인트 클라우드 수를 줄임으로써 실행 속도를 높입니다. |
응용 시나리오
이 스텝은 카메라에서 캡처된 뎁스 맵을 포인트 클라우드로 전환하는 데 사용됩니다. 보통 “카메라에서 이미지를 캡처하기” 스텝 후에 사용되며, ROI를 통해 불필요한 포인트 클라우드를 제거하여 실행 속도를 높일 수 있습니다.
파라미터 설명
| 파라미터 | 설명 | 그림 |
|---|---|---|
뎁스 맵 ROI 파일 |
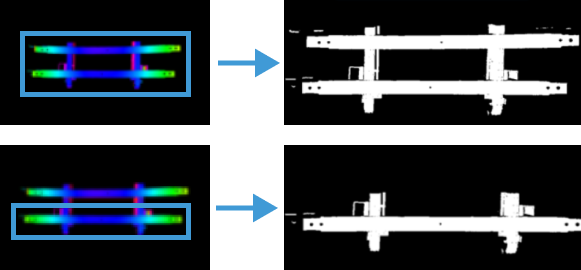
조정 설명: 뎁스 맵의 ROI를 선택합니다.
조정 예시: 다양한 ROI를 선택하고 비교합니다. 오른쪽 그림과 같이 왼쪽 이미지는 뎁스 맵의 ROI이며 오른쪽 이미지는 출력된 포인트 클라우드입니다. |
|