시뮬레이션 로봇 실행하기
시뮬레이션 로봇 실행이란 가상 환경에서 로봇과 그 작업을 시뮬레이션하는 것을 말합니다. 소프트웨어를 통해 로봇의 이동, 환경과의 상호 작용 등을 시뮬레이션하여 모션 경로를 검증하고, 경로 계획을 최적화하며, 발생 가능한 충돌 위험을 예측할 수 있습니다.
Mech-Viz 소프트웨어는 시뮬레이션 로봇을 실행하는 두 가지 방식을 지원합니다.
-
비전 서비스를 사용하여 시뮬레이션 로봇을 실행합니다(기본값).
-
비전 기록을 사용하여 시뮬레이션 로봇을 실행합니다.
비전 서비스를 사용하여 시뮬레이션 로봇 실행하기
작업 흐름을 구축한 후, 로봇의 이동을 시뮬레이션하여 작업 흐름의 실행 가능성을 검증할 수 있습니다.
시뮬레이션을 클릭하면 시뮬레이션 로봇을 제어하여 이동시킬 수 있습니다. 정지 버튼을 클릭하면 로봇의 동작을 중지할 수 있습니다.
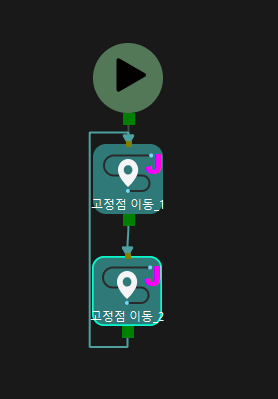
작업 흐름 |
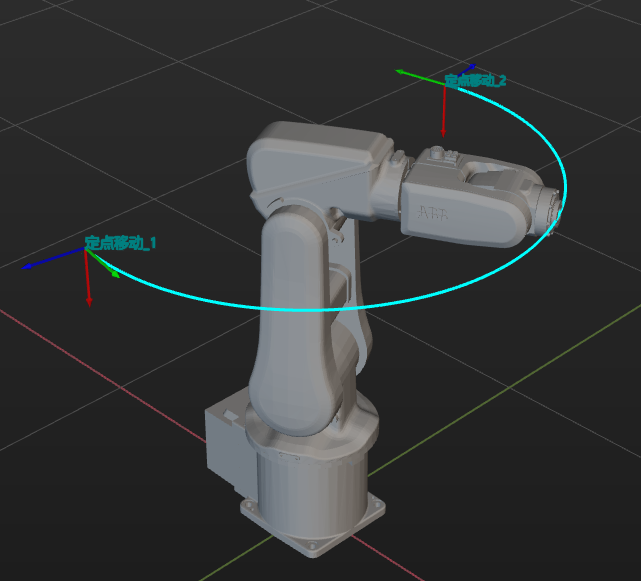
시뮬레이션 효과 |
|
|
비전 기록을 사용하여 시뮬레이션 로봇 실행하기
비전 기록을 이미 저장한 경우, 동일한 솔루션의 Mech-Vision 프로젝트를 실행할 필요 없이 Mech-Viz 프로젝트를 직접 실행하여 이전 시뮬레이션 결과를 재현할 수 있습니다. 이를 통해 문제 해결이나 데모를 더 쉽게 진행할 수 있습니다.
비전 기록을 사용하여 시뮬레이션하려면 시뮬레이션 오른쪽의 ![]() 를 클릭하고 비전 기록 사용을 선택합니다.
를 클릭하고 비전 기록 사용을 선택합니다.
구체적인 작업은 비전 기록 저장 및 사용을 참조하십시오.