대상 물체 포즈 티칭
여러 가지 피킹 방식으로 대상 물체를 피킹하면서 동시에 대상 물체를 고정된 포즈로 배치해야 하는 경우, Mech-Viz에서 배치 웨이 포인트를 티칭하여 대상 물체가 예상한 포즈로 정확하게 배치되도록 할 수 있습니다.
응용 예시
예를 들어 작은 부품에 여러 개의 가능한 픽 포인트가 있는 경우, 다양한 방식으로 피킹할 수 있습니다. 하지만 대상 물체는 이송 플랫폼에 특정 포즈로 배치되어야 하므로, 배치 시 대상 물체의 포즈를 일관되게 유지해야 합니다.
작업 프로세스
마스터 컨트롤 통신 방식과 표준 인터페이스 통신 방식에서는 대상 물체 포즈 티칭 작업 절차에 차이가 있습니다. 해당 작업 절차를 참고하여 작업하십시오.
마스터 컨트롤 통신 방식에서의 대상 물체 포즈 티칭 프로세스
마스터 컨트롤 통신 방식에서는 다음 단계에 따라 대상 물체 포즈를 티칭하십시오.
-
구축한 작업 흐름으로 마스터 컨트롤 통신 방식에서 로봇이 대상 물체를 성공적으로 피킹할 수 있는지 확인합니다.
-
로봇이 대상 물체를 들고 목표 배치 위치에 도달했는지 확인합니다.
-
시뮬레이션 로봇과 실제 로봇의 포즈가 일치하는지 확인하십시오. 일치하지 않으면 툴바에서 로봇 동기화 버튼을 클릭하십시오.
-
작업 흐름에서 배치 웨이 포인트로 사용할 "고정점 이동" 스텝을 선택한 후, 아래 스텝 파라미터 영역에서 대상 물체 포즈 티칭 버튼을 클릭하십시오.
-
팝업 창에서 예를 클릭하면 배치 웨이 포인트의 목표 유형이 자동으로 대상 물체 포즈로 전환됩니다. 이때 대상 물체 포즈 티칭이 완료됩니다.
표준 인터페이스 통신 방식에서의 대상 물체 포즈 티칭 프로세스
표준 인터페이스 통신 방식에서는 다음 단계에 따라 로봇 측에서 대상 물체 포즈를 티칭하고, 로봇 프로그램과 Mech-Viz 작업 흐름의 웨이 포인트를 동기화하십시오.
-
로봇 피킹 프로그램을 실행하고 로봇이 Mech-Viz가 출력한 계획 경로를 따라 대상 물체를 성공적으로 피킹했는지 확인합니다.
-
대상 물체를 들고 있는 로봇을 수동으로 제어하고 목표 배치 위치로 이동합니다.
-
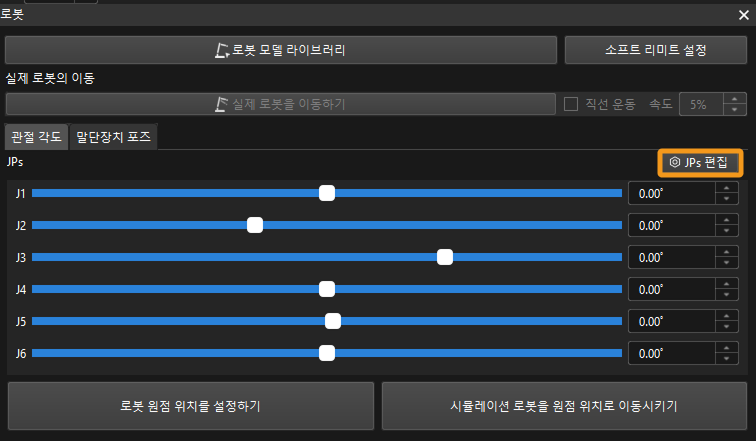
로봇 기능 패널에서 JPs 편집을 클릭하고 티치 펜던트에서 읽은 로봇 관절 위치를 수동으로 입력하여 시뮬레이션 로봇과 실제 로봇의 포즈가 동일하도록 하십시오.
-
작업 흐름에서 배치 웨이 포인트로 사용할 "고정점 이동" 스텝을 선택한 후, 아래 스텝 파라미터 영역에서 대상 물체 포즈 티칭 버튼을 클릭하십시오.
-
팝업 창에서 예를 클릭하면 배치 웨이 포인트의 목표 유형이 자동으로 대상 물체 포즈로 전환됩니다.