빈 내 스마트 경로 이동
프로젝트 소개
이 부분에서는 빈 내 스마트 경로 이동을 사용하여 깊은 빈에 무작위로 쌓인 원통형 튜브를 피킹하는 방법을 소개합니다. Mech-Viz 소프트웨어는 빈과 대상 물체 모델 정보를 기반으로 로봇이 피킹할 전체 경로(빈에 들어갔다 나오는)를 자동으로 생성하며, 충돌을 효과적으로 방지합니다.
실제 작동 효과:


작업 흐름
빈 내 스마트 경로 이동 스텝의 작업 흐름 구축 방법은 다음과 같습니다.
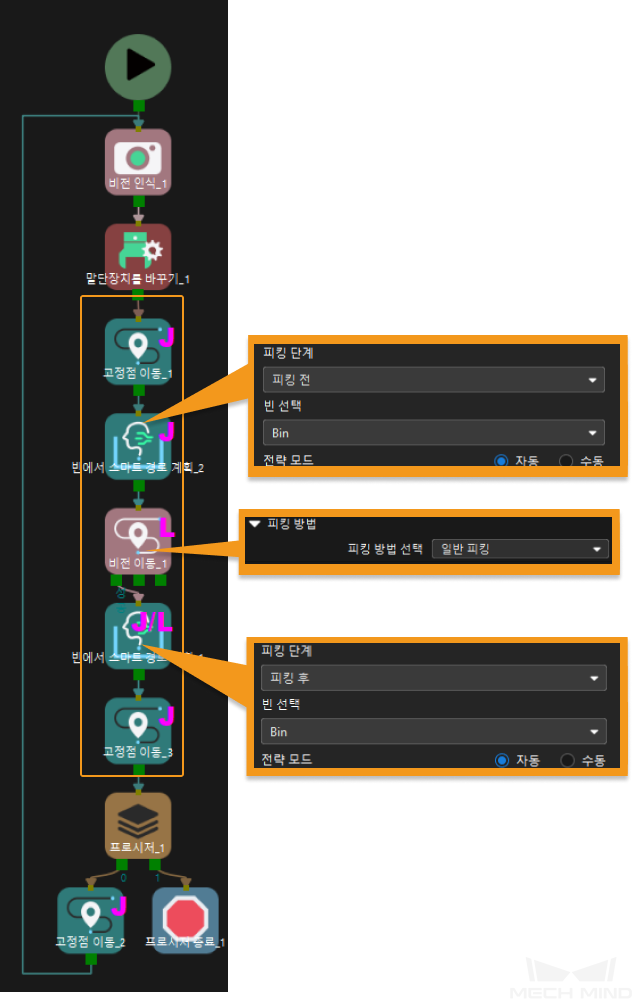
프로젝트를 구축할 때 다음 사항에 유의해야 합니다.
-
빈에 들어가는 경로와 나가는 경로에 모두 빈 내 스마트 경로 이동 스텝을 추가해야 하며, 빈 내 스마트 경로 이동 스텝은 반드시 비전 이동 스텝과 인접해 있어야 합니다.
-
비전 이동 스텝의 피킹 방법은 반드시 일반 피킹으로 설정해야 합니다.
-
빈 내 스마트 경로 이동 스텝은 작업 흐름 마지막 스텝으로 사용할 수 없으며, 고정된 웨이 포인트가 있는 이동 유형 스텝이 있어야 합니다.
-
빈 내 스마트 경로 이동 스텝은 2개의 웨이 포인트에 해당합니다. 피킹 단계가 피킹 전일 때 해당 웨이 포인트는 접근 포인트와 Enter-bin 포인트입니다. 피킹 단계가 피킹 후일 때 해당 웨이 포인트는 출발 포인트와 Exit-bin 포인트입니다. 로봇 통신 프로그램을 작성할 때 두 개의 웨이 포인트를 수신하는 것이 중요합니다. 자세한 내용은 샘플 프로그램을 참조하십시오.
-
현재 피킹 단계가 피킹 전인 경우 빈 내 스마트 경로 이동 스텝은 비전 이동 스텝 전에 연결되어야 합니다.
파라미터 조정 설명
-
피킹 단계: 비전 이동 스텝 전의 빈 내 스마트 경로 이동 스텝인 경우, 피킹 단계를 피킹 전으로 설정해야 합니다. 반면, 비전 이동 스텝 후의 빈 내 스마트 경로 이동 스텝인 경우, 피킹 단계를 피킹 후로 설정해야 합니다.
빈 선택: 프로젝트 리소스 트리의 장면 물체에 추가된 빈 유형의 시나리오 모델을 선택합니다. 빈의 포즈나 치수가 잘못 설정되거나 잘못된 빈이 선택되면 경로 계획이 실패하거나 피킹 과정에서 충돌이 발생할 수 있습니다.
전략 모드: 자세한 내용은 전략 모드를 참조하십시오.
-
충돌 감지 파라미터 설정
빈 내 스마트 경로 이동 스텝을 사용할 때는 충돌 감지 기능 패널에서 대상 물체 충돌 감지를 활성화해야 합니다. 충돌 감지 파라미터 조정에 대한 자세한 내용은 충돌 감지 파라미터 설정을 참조하십시오.
