비전 이동
기능 설명
이 스텝에서는 비전 서비스에서 반환된 비전 결과를 기반으로 대상 물체를 피킹하기 위한 로봇의 경로와 포즈를 계획합니다.
| 아웃 포트 | 설명 |
|---|---|
성공 |
경로 계획에 성공합니다. |
계획 실패 |
경로 계획에 실패합니다. |
기타 실패 |
"비전 이동" 스텝에서 계획에 사용할 수 있는 포즈가 없습니다. 가능한 원인: Mech-Vision에서 포즈를 출력하지 않았습니다. Mech-Vision에서 출력된 포즈 중 요구 사항을 충족하는 결과가 없습니다. |
응용 시나리오
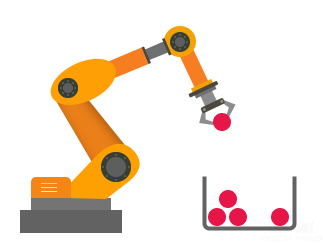
실제 응용 시나리오 및 사용하는 말단장치 유형에 따라 피킹 방법은 일반 피킹, 상자 디팔레타이징 및 배열로 피킹 세 가지를 선택할 수 있습니다.
실제 상황에 따라 선택하십시오. 피킹 방법이 다르면 표시된 파라미터도 다릅니다. 상세한 내용은 아래 표를 참조하십시오.
피킹 방법 |
설명 |
예시 그림 |
|
산업용 부품, 택배 소포 등을 피킹하는 시나리오에 사용됩니다.
|
|
||
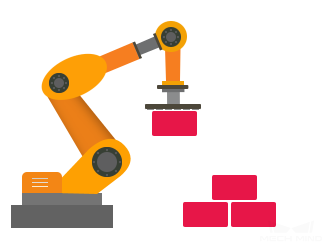
상자 디팔레타이징 |
피킹해야 할 물체는 상자, 회전율 상자, 마대이며 한 번에 하나씩만 피킹하는 시나리오에 사용됩니다.
|
|
|
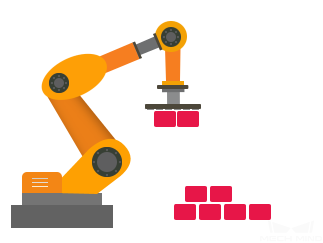
피킹해야 할 물체는 상자, 회전율 상자, 마대이며 한 번에 여러 개를 피킹하는 시나리오에 사용됩니다.
|
|
||
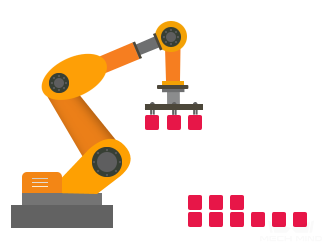
말단장치에 말단이 여러 개가 있으며 각 말단으로 한 대상 물체를 고정적으로 피킹하는 시나리오에 사용됩니다. 현재 이 방법은 단일 행에 배열된 여러 말단장치만 지원합니다. |
|
||