충돌 감지
이 기능 패널에서 충돌 감지를 구성할 수 있습니다. 로봇 경로 계획 시, Mech-Viz는 3D 시뮬레이션 구역에서 충돌이 발생할 수 있는 부분을 강조 표시하고, 실제 충돌을 방지하기 위해 프로젝트 실행을 중단합니다.
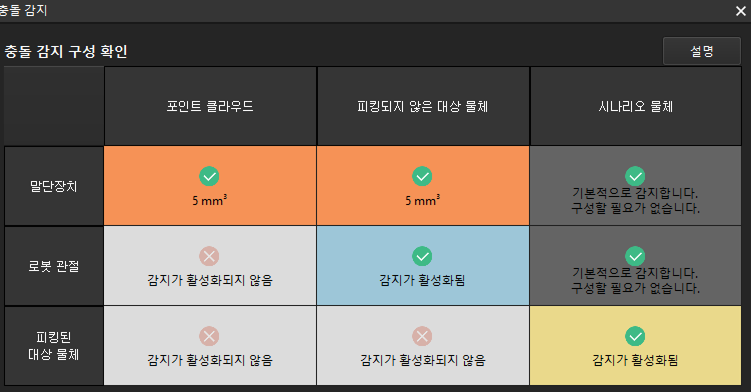
이 표에는 모든 충돌 감지 구성 현황이 동적으로 표시됩니다. 설명을 클릭하면 표의 서로 다른 색상이 나타내는 의미를 확인할 수 있습니다. 해당 셀 위에 마우스 커서를 올리면 해당 유형의 충돌 감지를 활성화하는 구체적인 방법을 확인할 수 있습니다.
자세한 작업 설명은 충돌 감지 구성을 참조하십시오.