2D 포인트를 3D 포즈로 변환
기능
이 스텝은 2D 카메라가 인식한 대상 물체의 2D 포즈 또는 2D 형상을 카메라 외부 파라미터 캘리브레이션 데이터와 티칭 포즈와 결합하여 로봇 좌표계 기준의 3D 대상 물체 포즈로 변환할 수 있습니다.
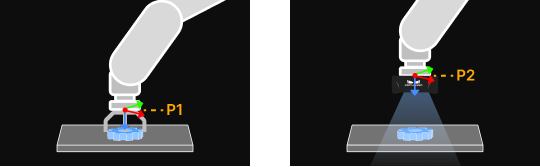
그림의 왼쪽은 티칭된 기준 피킹 포즈(P1), 오른쪽은 촬영 시 티칭된 플랜지 포즈(P2)입니다.
응용 시나리오
이 스텝은 2D 비전을 통해 대상 물체를 위치 지정하고, 그 위치 지정 결과를 로봇 피킹, 조립 등의 응용에 사용해야 하는 시나리오에 적합합니다. 일반적으로 앞단에는 2D 매칭, 2D Blob 분석 등의 위치 지정 인식 스텝이 오고, 뒤단에는 출력 스텝 또는 포즈 보정(조립) 스텝이 연결됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
입력 유형 |
파라미터 설명: 입력 데이터 유형을 지정합니다. 대상 물체 2D 포즈와 대상 물체 2D 형상 두 가지를 포함합니다. |
카메라 스텝 선택 |
파라미터 설명: 외부 파라미터 캘리브레이션이 완료된 2D 카메라 스텝을 선택하여, 보정 데이터가 현재 스텝에 정확히 적용되도록 합니다. |
기준 대상 물체 2D 포즈 |
파라미터 설명: 기준 대상 물체가 촬영 시 인식된 2D 포즈입니다. 일반적으로 이전 스텝의 출력에서 이 입력 포트로 전달된 데이터 흐름에서 얻습니다. |
기준 피킹 포즈 |
파라미터 설명: 로봇이 기준 대상 물체를 피킹할 때의 플랜지 포즈이며, 티칭 펜던트에서 읽은 로봇 좌표계 기준 플랜지 포즈입니다. |
촬영 시 플랜지 포즈 |
파라미터 설명: Eye in Hand 시나리오에서 로봇이 촬영 지점에서 기준 대상 물체를 촬영할 때의 플랜지 포즈이며, 티칭 펜던트에서 읽은 로봇 좌표계 기준 플랜지 포즈입니다. |
파라미터에서 플랜지 포즈 가져오기 |
파라미터 설명: 통신 서비스를 활성화하면 이 기능은 자동으로 꺼지며, 입력된 로봇 플랜지 포즈는 사용되지 않습니다. 조정 설명: 로봇 플랜지 포즈를 다시 입력해야 하면 통신 서비스를 끈 뒤 이 기능을 다시 활성화하십시오. |
촬영 시 플랜지 포즈 |
파라미터 설명: 실제 촬영 시의 로봇 플랜지 포즈를 입력합니다. |
통신 컴포넌트의 로봇 서비스 이름 |
파라미터 설명: 로봇 모델명을 입력하며, 통신 컴포넌트에 연결된 로봇 모델명과 일치해야 합니다. |