스텝 파라미터를 설정하기
전역 구성
모든 비전 결과를 계획하기
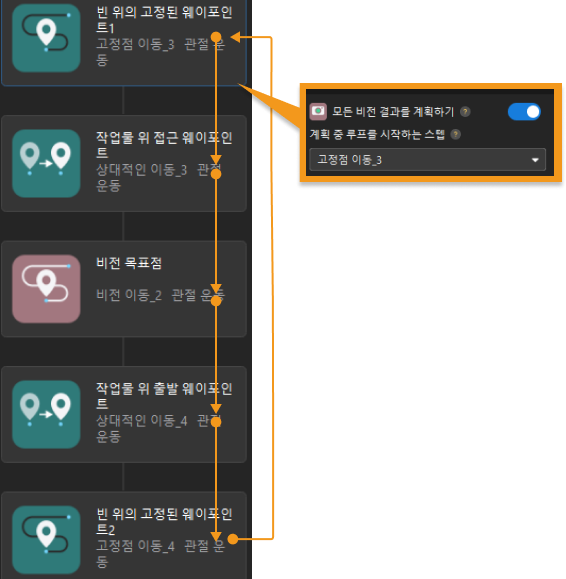
이 파라미터를 활성화하면 수신된 모든 비전 결과가 경로 계획에 사용될 때까지 현재 작업 흐름이 반복되고, 계획이 완료된 후에는 계획된 모든 피킹 경로를 출력할 수 있습니다. 이 기능을 사용하려면 계획 중 루프를 시작하는 스텝을 설정해야 합니다.
| 계획: 소프트웨어가 로봇이 목표 위치에 도달하기 위해 따를 수 있는 충돌 없는 경로를 찾으려고 시도하는 프로세스를 의미합니다. |
“계획 중 루프를 시작하는 스텝”이란 계획에서 루프가 시작되는 위치입니다. 예를 들어, 아래 그림에서 "고정점 이동_3"이 계획의 루프 시작 스텝으로 설정되고 소프트웨어는 수신된 모든 비전 결과가 경로 계획에 사용될 때까지 현재 작업 흐름을 반복합니다.
상자 디팔레타이징
이 파라미터를 활성화하면 소프트웨어가 디팔레타이징 모드로 전환되고, 이 모드에서 말단장치는 디팔레타이징 진공 그리퍼로 설정됩니다. 실제 응용 시나리오에 따라 디팔레타이징 방식을 선택해야 합니다.
| 상자 디팔레타이징 기능을 활성화한 후, 소프트웨어는 기본적으로 대상 상자의 포인트 클라우드를 제거하고 X/Y방향 포인트 클라우드 제거 범위 확장 값이 10mm, Z 방향 포인트 클라우드 제거 범위 확장 값이 30mm로 설정됩니다. 이 기능의 상세한 설명은 대상 물체의 포인트 클라우드를 제거하기 내용을 참조하세요. |
상자 디팔레타이징 - 싱글 피킹
싱글 피킹이란 한 번에 하나의 상자만 피킹한다는 것을 의미합니다.
다음과 같이 설정하세요:
-
프로젝트 소스 트리의 말단장치 오른쪽에 있는 +를 클릭하여 말단장치 구성 창을 엽니다.
이 창에서 다음과 같이 설정하세요:
-
말단장치 유형을 디팔레타이징 진공 그리퍼로 설정합니다.
-
디팔레타이징 진공 그리퍼 구성을 클릭하여 진공 그리퍼 구성기를 엽니다. 진공 그리퍼 구성기 내용을 참조하여 구성하세요.
-
-
전역 구성에서 상자 디팔레타이징 파라미터를 선택합니다.
-
상자 디팔레타이징 모드에서 싱글 피킹을 선택합니다.
-
상자 초과 비율 하한 파라미터 값을 실제 상황에 따라 설정하세요.
이 파라미터는 진공 그리퍼가 상자를 피킹하려고 할 때 진공 그리퍼가 상자 상단 표면을 덮는 최소 비율을 지정합니다. 실제 비율이 이 값보다 큰 경우 진공 그리퍼가 상자를 피킹할 수 있는 것으로 간주됩니다.
상자 디팔레타이징 - 멀티 피킹
싱글 피킹이란 한 번에 여러 개 상자를 피킹한다는 것을 의미합니다.
다음과 같이 설정하세요:
-
말단장치 구성 도구를 엽니다.
-
말단장치 유형을 디팔레타이징 진공 그리퍼로 설정합니다.
-
디팔레타이징 진공 그리퍼 구성을 클릭하여 진공 그리퍼 구성기를 엽니다. 진공 그리퍼 구성기 내용을 참조하여 구성하세요.
-
-
전역 구성에서 상자 디팔레타이징 파라미터를 선택합니다.
-
상자 디팔레타이징 모드에서 멀티 피킹을 선택합니다.
-
실제 상황에 따라 다음 파라미터를 설정하세요:
-
상자 초과 비율 하한
이 파라미터는 진공 그리퍼가 상자를 피킹하려고 할 때 진공 그리퍼가 상자 상단 표면을 덮는 최소 비율을 지정합니다. 실제 비율이 이 값보다 큰 경우 진공 그리퍼가 상자를 피킹할 수 있는 것으로 간주됩니다.
-
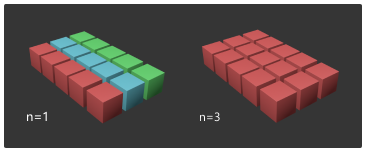
그룹당 최대 행수
멀티 피킹 과정에서 그룹화할 수 있는 최대 상자 행수입니다.
-
간격 상한
이 파라미터는 그룹화 방향에서 인접한 두 상자 사이의 최대 거리를 제한하며, 거리가 이 값보다 작을 경우 상자를 하나의 그룹으로 조합할 수 있습니다.
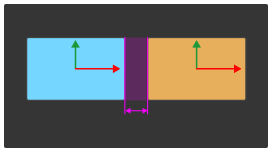
이 파라미터의 값은 비전 결과의 상자 너비보다 커서는 안 되며, 설정값이 상자 너비보다 크면 실제 작업 시 자동으로 상자 너비로 수정됩니다. -
편차 상한
이 파라미터는 그룹화 방향에 수직인 방향으로 상자의 최대 편차 거리를 제한합니다. 편차 거리가 이 값보다 작으면 상자가 그룹에 있는 것으로 간주될 수 있습니다.
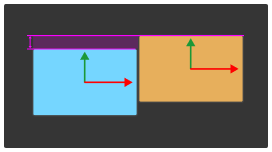
이 파라미터의 값은 비전 결과의 상자 너비보다 커서는 안 되며, 설정값이 상자 너비보다 크면 실제 작업 시 자동으로 상자 너비로 수정됩니다. -
각도 편차 상한
이 파라미터는 상자 그룹화 방향을 기준으로 상자의 회전 편차 각도를 제한합니다. 회전 각도가 이 값보다 작으면 상자가 하나의 그룹에 속하는 것으로 간주할 수 있습니다.
-
빈 위의 고정된 웨이포인트
고정된 포즈를 웨이포인트로 지정합니다.
파라미터 설명
-
로봇에 전송할지 여부
조정 설명: 이 스텝에 해당하는 포즈를 로봇으로 전송할지 여부를 설정합니다.
조정 예시: 계획만 하고 전송하지 않으면 경로 계획 스텝에서는 이 스텝과 대응하는 포즈를 출력하지 않습니다.
-
로봇 운동 방식
조정 설명: 로봇이 이 스텝에 대응하는 포즈로 이동하는 과정의 운동 방식을 설정합니다. 일반적으로 직선 운동은 접착제 도포 시나리오에 많이 사용됩니다.
조정 예시: 관절 운동이 선택된 경우 로봇은 관절 운동의 방식으로 이 스텝의 해당 포즈로 이동합니다.
-
웨이포인트 유형
조정 설명: 포즈를 조정하는 방식을 선택합니다.
다음 세 가지 방식으로 로봇의 포즈를 설정할 수 있습니다.
-
관절 각도(JPs)를 조정합니다.
-
3D 시뮬레이션 공간의 매니퓰레이터를 드래그합니다.
-
실제 로봇의 포즈를 이 스텝으로 입력합니다.
-
티치 펜던트에서 로봇을 이동시키고 TCP 또는 관절 각도(JPs)를 기록합니다.
-
로봇 기능 패널에서 포즈 편집(TCP를 선택한 경우) 또는 JPs 편집(JPs를 선택한 경우)를 클릭하세요.
-
기록된 TCP 또는 관절 각도(JPs)를 입력하고 확인 버튼을 클릭합니다. 시뮬레이션된 로봇을 해당 포즈로 이동시킵니다.
-
상대적인 이동
이전 또는 다음 웨이포인트를 기준으로 로봇이 Z축 방향에서의 이동을 설정합니다.
파라미터 설명
-
로봇에 전송할지 여부
조정 설명: 이 스텝에 해당하는 포즈를 로봇으로 전송할지 여부를 설정합니다.
조정 예시: 계획만 하고 전송하지 않으면 경로 계획 스텝에서는 이 스텝과 대응하는 포즈를 출력하지 않습니다.
-
로봇 운동 방식
조정 설명: 로봇이 이 스텝에 대응하는 포즈로 이동하는 과정의 운동 방식을 설정합니다. 일반적으로 직선 운동은 접착제 도포 시나리오에 많이 사용됩니다.
조정 예시: 관절 운동이 선택된 경우 로봇은 관절 운동의 방식으로 이 스텝의 해당 포즈로 이동합니다.
-
이동의 기준
조정 설명: 로봇이 이동할 때의 기준 포즈입니다.
조정 예시: 이전 웨이포인트를 선택하면 로봇이 이전 웨이포인트를 기준으로 이동합니다.
-
방향
조정 설명: 로봇의 이동 방향입니다.
조정 예시: “작업물 좌표계 Z축을 따라”를 선택한 경우, 로봇은 대상 물체 기준 좌표계의 Z축을 따라 이동합니다.
-
거리
조정 설명: 로봇이 이동 방향을 따라 이동하는 거리입니다.