Mech-Viz 사용 방법
이 섹션에서는 Mech-Viz를 통해 충돌 없는 경로를 계산하고 피킹을 실행하는 기본 작업 흐름을 소개합니다.
실제 프로젝트에서 Mech-Viz의 사용 과정은 여섯 단계로 나눌 수 있으며, 구체적인 내용은 아래 그림과 같습니다.

프로젝트 생성 및 솔루션 추가
솔루션은 비전 애플리케이션을 구현하는 데 필요한 로봇 및 통신, 비전 처리, 경로 계획 등의 기능 구성과 데이터의 집합입니다. 비전 솔루션을 배포하기 전에 먼저 Mech-Viz 프로젝트를 생성해야 합니다.
샘플 프로젝트 생성을 통해 작업 흐름과 파라미터 설정을 참고하여 관련 기능을 빠르게 이해할 수 있습니다. 또한 사용자 매뉴얼의 새로운 빈 프로젝트 생성을 직접 참조할 수 있습니다.
프로젝트 리소스 구성
새로운 빈 프로젝트를 생성한 후에는 프로젝트에 필요한 프로젝트 리소스, 즉 말단장치, 대상 물체, 장면 물체 등을 구성해야 합니다. 이러한 리소스는 실제 장면을 더 정확하게 시뮬레이션하는 데 도움이 되며, 그에 따라 충돌 없는 로봇 운동 궤적을 계산할 수 있습니다.
작업 흐름 구축
프로젝트 리소스 구성을 완료하면 비전 결과의 안내에 따라 로봇이 대상 물체를 정확하게 피킹할 수 있도록 작업 흐름을 구축할 수 있습니다. 로봇 피킹 프로세스 구축 방식은 아래 그림과 같이 선택한 로봇 통신 방식에 따라 달라집니다.
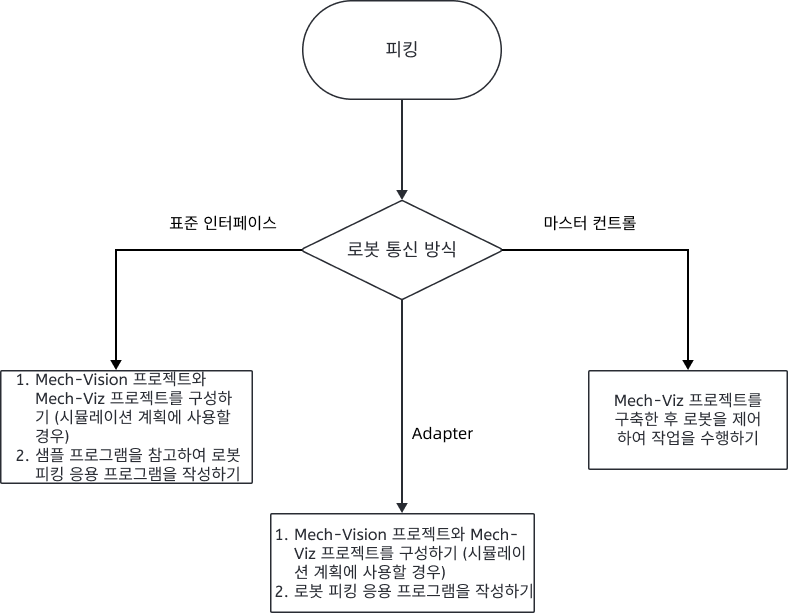
-
표준 인터페이스 통신 방식을 사용할 경우, 로봇 측에서 로봇 피킹 애플리케이션을 작성해야 하며 이를 통해 로봇이 비전 안내에 따라 피킹 작업을 수행할 수 있습니다. 자세한 내용은 표준 인터페이스 통신 방식에서의 피킹 프로세스 구축을 참조하십시오.
-
마스터 컨트롤 통신 방식을 사용하는 경우, Mech-Viz 소프트웨어에서 그래픽 방식으로 로봇 피킹 프로세스(즉 Mech-Viz 작업 흐름)를 구축할 수 있습니다.
Mech-Viz 작업 흐름을 구축하는 방법은 Mech-Viz 작업 흐름 구축을 참조하십시오.
충돌 감지 구성
피킹 애플리케이션에서 말단장치와 대상 물체, 빈 또는 기타 장면 물체 간 충돌을 방지하는 것은 매우 중요합니다. 시뮬레이션 실행 전에 잠재적 충돌 위험을 식별할 수 있도록 충돌 감지를 구성하십시오.
실제 로봇 실행
시뮬레이션 테스트를 통과한 후 실제 로봇 실행을 통해 피킹을 수행할 수 있습니다.