비전 시스템에 관한 소개
Mech-Mind 비전 시스템이란 무엇입니까?
Mech-Mind 비전 시스템은 자동차, 물류, 슈퍼마켓, 간설 기계 등 산업 분야를 위해 Mech-Mind에서 제공하는 포괄적인 3D 비전 솔루션이며 머신 텐딩, 디팔레타이징/팔레타이징, 위치 지정 및 조립, 피스 피킹, 품질검사 등 시나리오에 널리 응용되고 있습니다.
Mech-Mind비전 시스템은 일반적으로 산업용 로봇 및 협업 로봇(코봇)과 함께 사용됩니다.
비전 시스템의 구성 요소
아래 그림과 같이 Mech-Mind비전 시스템은 일반적으로 카메라, Mech-Mind 소프트웨어 시스템, IPC와 로봇으로 구성됩니다.
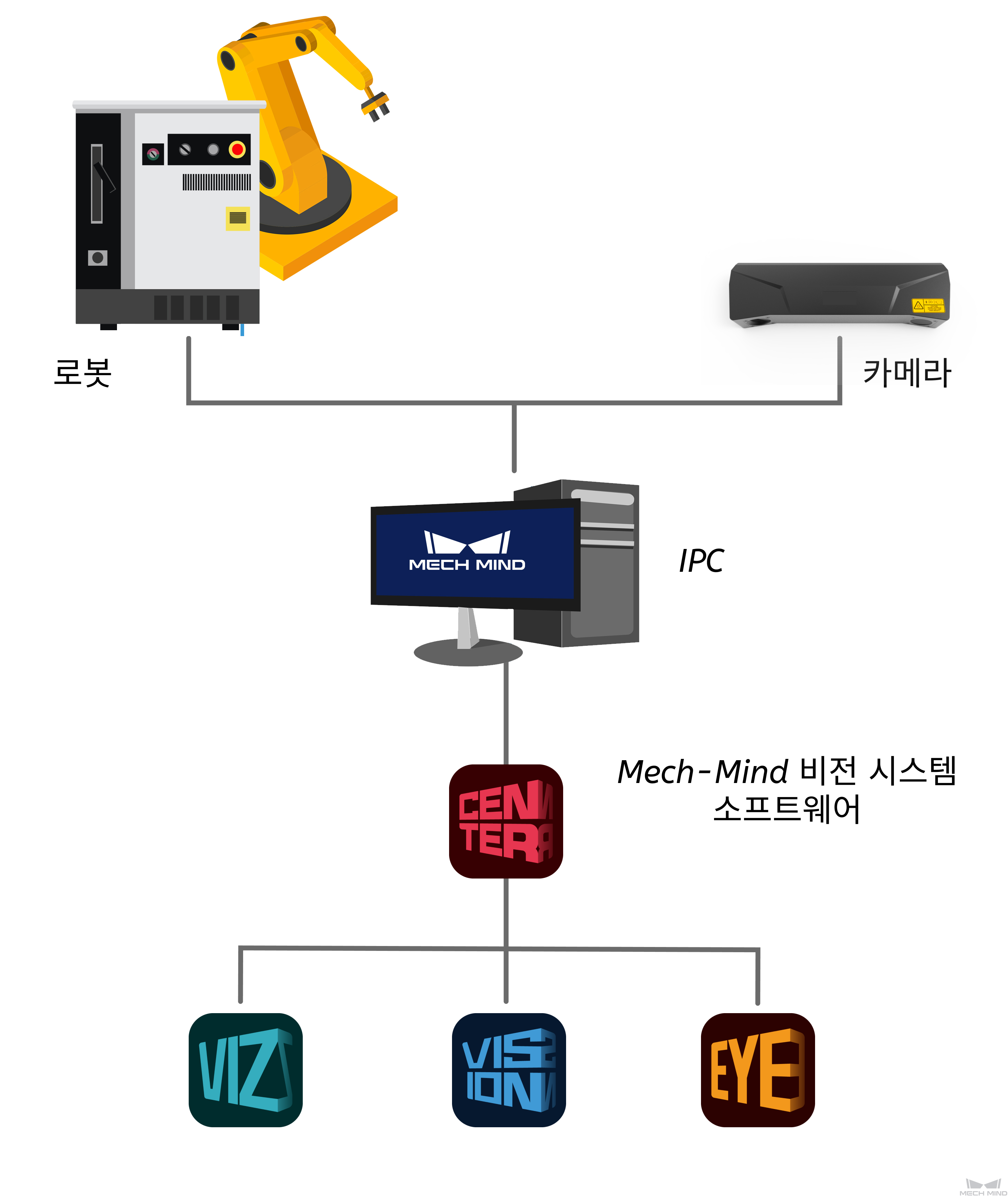
- 카메라
-
Mech-Mind에서 개발한 Mech-Eye 산업용 3D 카메라를 말하며 물체의 이미지 및 위치 정보를 획득하는 데 사용됩니다.
- Mech-Mind 소프트웨어 시스템
-
Mech-Mind의 소프트웨어 시스템은 카메라가 캡처한 이미지와 위치 정보를 기반으로 비전 처리를 수행하고 물체의 위치와 자세는 물론 계획된 로봇의 이동 경로를 출력하여 피킹, 디팔레타이징/팔레타이징, 접착제 도포 및 분류와 같은 지능형 작업을 완료하도록 로봇을 가이드하는 데 사용됩니다.
- IPC
-
Mech-Mind의 소프트웨어 시스템을 위해 실행 환경을 제공하는 컴퓨터 장비를 말합니다.
- 로봇
-
로봇은 이동, 처리 또는 위치 지정과 같은 작업을 수행할 수 있는 프로그래밍된 자율성을 가진 기계입니다. Mech-Mind 비전 시스템에서는 비전 시스템의 출력 결과에 따라 지능형 작업을 수행합니다.
|
Mech-Mind 소프트웨어 시스템에 관한 소개
Mech-Mind에서 자체적으로 연구&개발한 Mech-Mind 소프트웨어 시스템은 로봇과 주변 장비를 위해 3D 비전 솔루션을 제공하며 주로 다음 소프트웨어들이 포함됩니다.
-
Mech-Eye Viewer
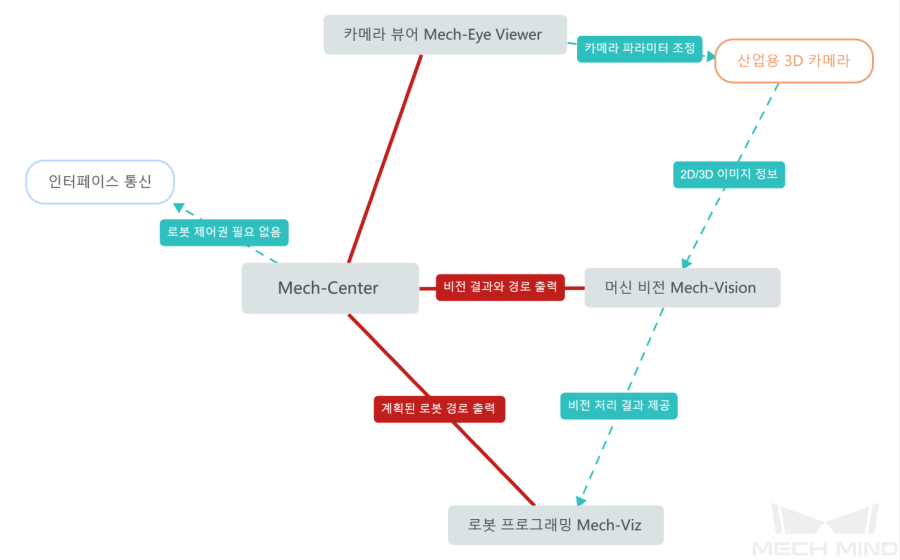
사용자가 Mech-Eye Viewer를 사용하여 대상 물체의 특성에 따라 Mech-Eye 산업용 3D 카메라의 파라미터를 조정하여 고품질 2D 맵, 뎁스 맵 및 포인트 클라우드를 간단하고 빠르게 획득할 수 있습니다.

-
Mech-Vision
Mech-Vision 머신 비전 소프트웨어는 코드를 작성하지 않고도 완전한 그래픽 인터페이스를 통해 랜덤 물체 피킹, 고정밀도 위치 지정, 조립, 산업 검사/측정 및 자동 경로 생성과 같은 고급 머신 비전 애플리케이션을 완료할 수 있습니다.
작업 현장에서 수집된 이미지 데이터를 기반으로 소프트웨어는 일련의 비전 알고리즘 처리를 수행하고 최종적으로 비전 결과(예: 대상 물체의 위치, 방향)를 출력합니다. 또한 시각적 결과를 기반으로 하여 간단한 경로 계획을 지원하고 로봇의 피킹 경로를 출력합니다.

-
Mech-Viz
Mech-Viz 로봇 프로그래밍 소프트웨어는 Mech-Vision에서 제공하는 포인트 클라우드 및 작업물 위치 정보를 사용하여 로봇 경로를 지능적으로 계획하며, 피킹, 취급 및 적재와 같은 복잡한 애플리케이션 시나리오에 적합합니다.
이 소프트웨어는 시각화된 방식으로 로봇의 작업 흐름을 구축할 수 있고 로봇의 실제 작업 전에 검증 작업을 위한 3D 시뮬레이션 기능도 제공합니다. 뿐만 아니라 이 소프트웨어는 이미 국내외의 많은 메인스트림 브랜드의 로봇에 적용되었습니다.

-
Mech-Center
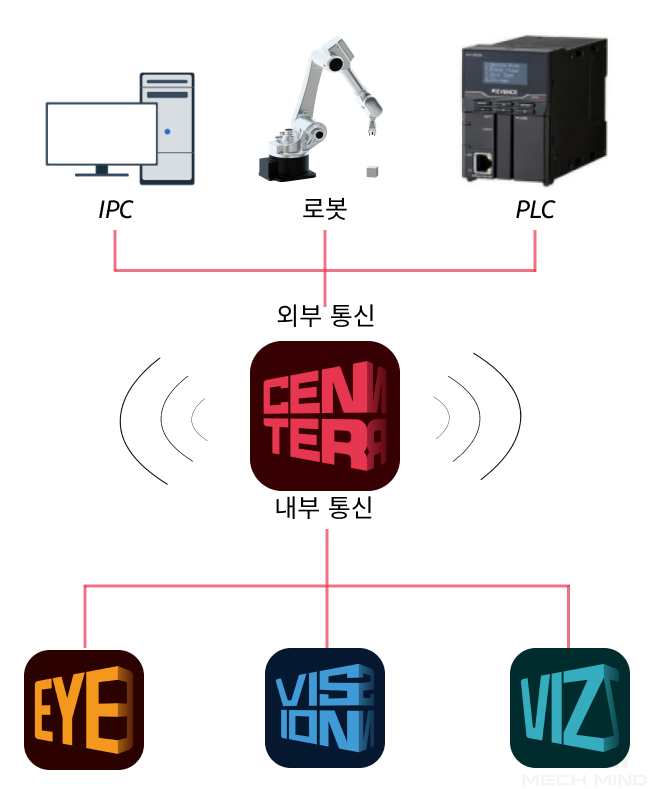
Mech-Center는 통신 허브 및 제어 센터로써 표준 인터페이스 프로토콜을 제공하고 고객이 통신 서비스를 맞춤화하여 외부 장치와의 통신을 실현하고 비전 가이드 로봇의 지능형 생산을 공동으로 완료할 수 있도록 지원합니다.
소프트웨어 시스템 내에서 Mech-Center는 각 소프트웨어 간의 내부 통신을 실현합니다. 예를 들어 Mech-Vision에서 출력한 비전 처리 결과를 Mech-Viz에 전송하여 로봇의 피킹 경로를 계획합니다. 외부 장치와 통신할 때 Mech-Center는 Mech-Vision 및 Mech-Viz에서 출력한 비전 처리 결과 또는 계획된 로봇 이동 경로를 로봇, PLC 또는 호스트 컴퓨터로 전송합니다. 소프트웨어 시스템이 외부 장치와 통신하는 방법은 아래를 참조하십시오.
Mech-Mind 소프트웨어 시스템의 각 소프트웨어 간의 관계는 아래 그림과 같습니다.
로봇 쪽과 통신
비전 쪽에서 출력한 비전 처리 결과(Mech-Vision) 또는 계획된 로봇 피킹 경로(Mech-Vision 또는 Mech-Viz)가 로봇 쪽으로 전송되도록 하려면 Mech-Mind 소프트웨어 시스템이 로봇 쪽과 정상적으로 통신할 수 있어야 합니다.
Mech-Mind 비전 시스템은 다음 통신 방식을 지원합니다:
-
마스터 컨트롤 통신
마스터 컨트롤 통신 방식에서 비전 쪽은 로봇을 제어합니다. 즉, 비전 쪽은 마스터(master) 장치로, 로봇은 슬레이브(slave) 장치로 작업합니다. 비전 쪽은 계획된 로봇 경로에 따라 머신 텐딩 또는 디팔레타이징/팔레타이징과 같은 작업을 수행하도록 로봇을 제어합니다.
이 방식을 사용할 때 마스터 컨트롤 프로그램을 로봇에 복제하거나 로봇의 SDK(Software Development Kit)를 통해 로봇에 대한 제어 권한을 얻어야 합니다. 이 방식은 비전 쪽과 PLC 또는 호스트 컴퓨터 간의 통신을 지원하지 않습니다.
-
인터페이스 통신
인터페이스 통신 방식에서 비전 쪽은 로봇의 제어 권한을 얻을 필요가 없으며 로봇 쪽은 마스터 장치로 작업하고 비전 쪽은 슬레이브 장치로 작업합니다. 로봇 쪽과 비전 쪽은 동일한 표준 통신 프로토콜을 사용하여 통신하고 로봇 쪽은 요청을 보내고 비전 쪽은 처리 후 응답을 반환합니다. 요청에 따라 비전 쪽은 비전 처리 결과 또는 계획된 로봇 피킹 경로를 반환합니다. 로봇은 비전 쪽에서 반환된 응답에 따라 추가 결정을 내리거나 해당 작업을 수행합니다.
인터페이스 통신 방식을 사용할 때 로봇 인터페이스 프로그램(비전 쪽과 통신하기 위함)과 로봇 피킹 프로그램(비전 쪽에서 반환된 데이터를 받아 로봇이 작업을 수행하도록 제어하기 위함)을 작성하고 프로그램을 로봇으로 복제해야 합니다. 이 방식은 비전 쪽과 로봇, PLC 및 호스트 컴퓨터 간의 통신을 지원합니다.
통신 방식에 대한 자세한 내용은통신 개요 내용을 참조하십시오.