EtherNet/IP 통신 구성
이 부분에서는 EtherNet/IP 통신을 구성하는 방법에 대해 설명합니다. 실행하기 전에 먼저 로봇을 선택하기를 확인하고 통신 구성 인터페이스로 들어가십시오.
-
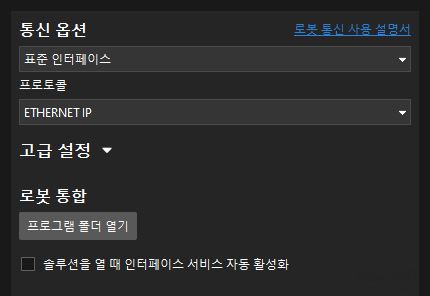
통신 방식에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고 프로토콜은 ETHERNET IP로 선택합니다.
-
(선택사항) 고급 설정에서 실제 요구 사항에 따라 설정을 진행하십시오.
-
한 번에 전송할 수 있는 최대 포즈 수: "Mech-Vision 프로젝트를 실행하기” 명령어를 사용할 때 여기에서 사용자는 비전 시스템이 한 번에 전송할 수 있는 최대 포즈 수를 설정할 수 있습니다. 여기에서의 최대 수의 한계는 30입니다.
-
Mech-Viz 데이트 가져오는 데 시간 초과(초): "Mech-Viz 프로젝트를 실행하기” 명령어를 사용할 때 만약 Mech-Viz가 여기에서 설정된 시간 내에 처리 결과를 반환하지 않으면, 타임아웃 오류 상태 코드가 반환됩니다.
-
Mech-Vision 데이트 가져오는 데 시간 초과(초): "Mech-Vision 프로젝트를 실행하기” 명령어를 사용할 때 만약 Mech-Vision가 여기에서 설정된 시간 내에 처리 결과를 반환하지 않으면, 타임아웃 오류 상태 코드가 반환됩니다.
-
캡처 후 "1102: 성공적으로 트리거됨"이 반환됨: EIH 시나리오에서 사용자가 이 옵션을 선택하면, 비전 시스템은 카메라 캡처가 완료된 후 "1102: 성공적으로 트리거됨"을 반환하며, 이렇게 되면 로봇은 Mech-Vision 프로젝트 실행이 끝날 때까지 기다리지 않고 바로 이동을 시작할 수 있어 사이클 타임을 단축할 수 있습니다. 사용자가 이 옵션을 선택하지 않으면, 로봇은 Mech-Vision 프로젝트 실행이 끝날 때까지 기다린 후에야 이동할 수 있습니다.
이 옵션을 선택하면, 아래에 캡처 완료를 기다릴 때의 제한 시간이 표시됩니다. 카메라 캡처 시간이 길 경우, 이곳의 제한 시간을 적절히 증가할 수 있습니다. -
속성 구성: 위에서 선택한 프로토콜에는 해당되지 않으므로, 이 버튼은 무시하십시오.
-
리셋: 위의 구성 항목을 기본값으로 설정합니다. (속성 구성은 제외)
-
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화를 선택합니다. 다음에 솔루션을 열 때 인터페이스 서비스 시작 할 필요가 없습니다.
-
응용을 클릭합니다.
-
인터페이스 서비스 시작 합니다.
선택한 통신 대상에 따라 표준 인터페이스 구성 작업을 수행합니다.