대상 물체 편집기(대상 물체를 피킹하기)
기능
대상 물체 편집기는 Mech-Vision 제공되는 표준화된 대상 물체 관리 모듈로, 프로세스를 통해 다양한 응용 시나리오에 맞는 대상 물체 구성을 빠르게 완료할 수 있도록 지원합니다. 현재 제공되는 대상 물체는 피킹 유형, 궤적 유형, 빈 유형 세 가지 유형으로 구성되어 있으며, 이를 통해 사용자는 대상 물체 피킹, 경로 계획 또는 빈 인식 등의 응용 시나리오에서 대상 물체 구성과 관리를 효율적으로 완료할 수 있도록 지원합니다. 사용자가 새 대상 물체를 생성하거나, 대상 물체 파라미터를 조정하거나, 다른 대상 물체 구성으로 전환할 때는 대상 물체 편집기를 통해 작업해야 합니다. 주요 기능은 다음과 같습니다:
| 번호 | 주요 기능 | 설명 |
|---|---|---|
1 |
명확하고 자세한 대상 물체 구성 워크플로 |
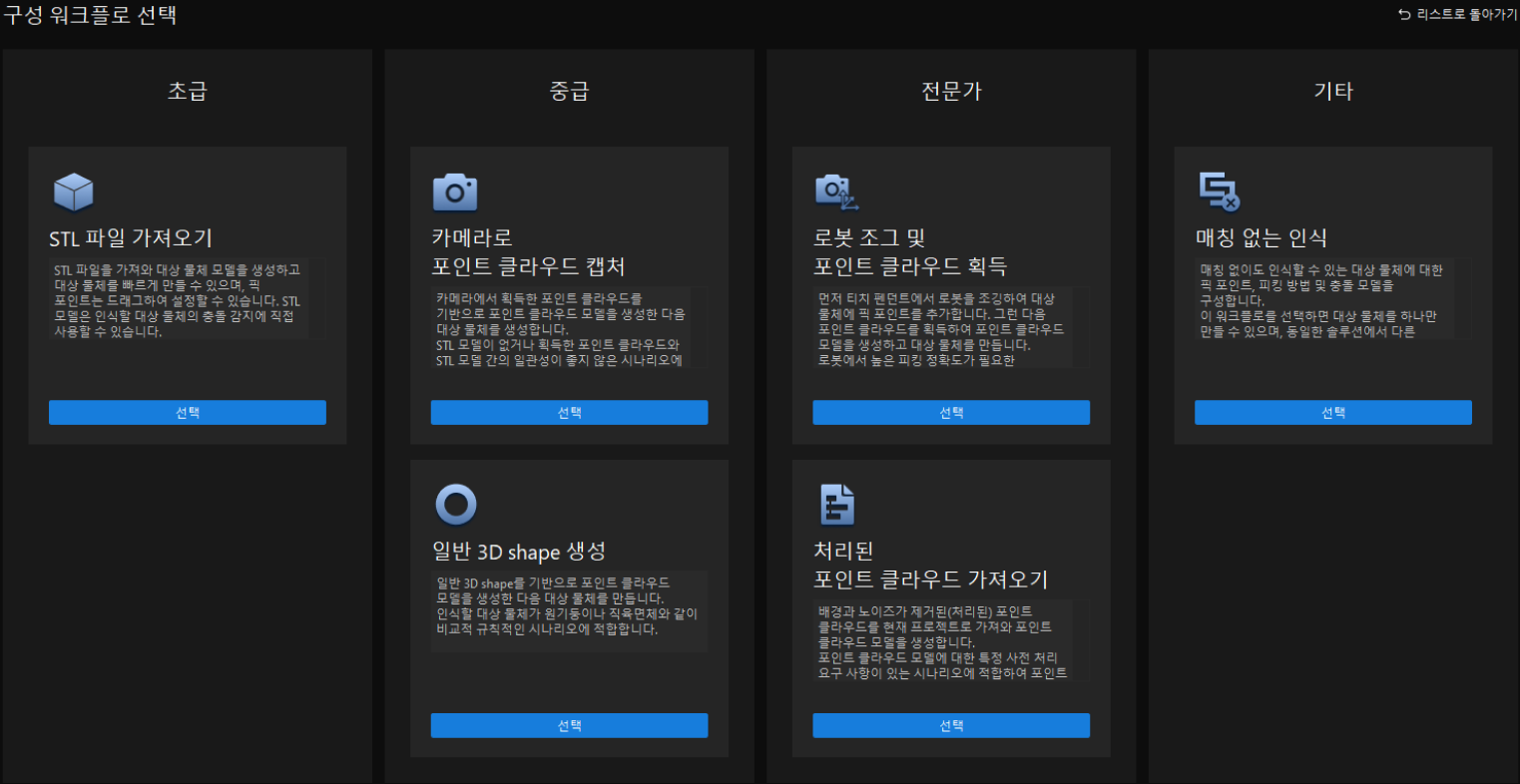
대상 물체 편집기에는 다양한 가이드 구성 워크플로가 제공됩니다. 가이드 내용을 따라 적절한 워크플로를 선택하여 대상 물체 구성을 완료할 수 있습니다. |
2 |
구성 결과의 실시간 시각화 |
대상 물체 편집기에는 대상 물체 구성 결과를 실시간으로 미리 보거나 픽 포인트를 조정하는 등 영역 내에서 직접 특정 구성을 적용할 수 있는 시각화 영역을 제공합니다. |
3 |
보다 통합된 대상 물체 구성 |
대상 물체 편집기에는 대칭 설정, 픽 포인트 설정, 충돌 모델 설정과 같은 다양한 대상 물체 설정을 통합합니다. 이 툴을 사용하면 이러한 모든 작업을 하나의 통합된 인터페이스에서 관리할 수 있습니다. |
|
2.2.0 버전 소프트웨어를 사용하여 구성된 대상 물체는 2.2.0 이전 버전의 소프트웨어에서는 사용할 수 없습니다. |
이 부분에서는 피킹 유형 대상 물체의 구성 프로세스를 소개합니다.툴 바에서 대상 물체 편집기 버튼을 클릭한 후 대상 물체 편집기 홈페이지에서 피킹 유형 대상 물체를 선택하고, 실제 필요에 따라 대상 물체 구성 프로세스를 선택하면 됩니다.