기타
이 기능 패널은 실행 설정, 스텝 수집 설정, 싱귤래리티 감지 설정 및 전역 JPs 제약 조건 설정에 사용됩니다.
실행 설정
-
인접한 이동 목표 건너뛰기
두 웨이 포인트가 매우 가까우면 이전 웨이 포인트만 로봇에 전송합니다.
-
기본 대상 물체 구성만 사용하기
활성화하면 물체 레이블을 수신해도 기본 대상 물체 구성을 사용합니다.
-
로봇 서비스 제한 시간
Mech-Viz와 로봇 간 통신의 제한 시간입니다(이동 유형 스텝 및 "제어권 이전" 스텝 제외). 기본값은 1000ms입니다.
싱귤래리티 감지
싱귤래리티 감지의 역할
로봇이 싱귤래리티 근처로 이동하면 일부 직선 운동 명령어를 실행할 수 없어 로봇 경보가 발생하고 생산이 중단될 수 있습니다. 싱귤래리티 감지 기능은 경로 계획 과정에서 사전 경고를 제공하고 경로상의 싱귤래리티를 회피하도록 시도하여 로봇 동작을 더 원활하게 만들고 시스템 경보 및 이상 상황의 발생을 줄여 생산 연속성을 유지하는 데 도움이 됩니다.
싱귤래리티 감지 방식
Mech-Viz 소프트웨어는 기타 기능 패널의 싱귤래리티 감지에서 설정한 최대 속도, 감속비, 관절 각도 범위를 통해 싱귤래리티를 감지합니다. 싱귤래리티 감지 기능은 다음 네 가지 옵션을 제공합니다.
-
감지하지 않기
-
각 관절의 속도를 감지하기
-
특정 관절의 각도를 감지하기
-
각 관절의 속도와 특정 관절의 각도를 감지하기
| 싱귤래리티 감지는 운동 방식이 직선 운동으로 설정된 이동 유형 스텝에만 적용됩니다. |
각 관절의 속도를 감지하기
-
설명
로봇의 임의 관절 속도가 최대 속도 설정값보다 크면, Mech-Viz는 해당 이동 유형 스텝에 설정된 속도를 감속비에 따라 낮추고 다시 감지합니다. 감속 후 속도가 최대 속도 설정값보다 작으면 로봇은 해당 스텝 실행 시 감속하여 동작합니다. 감속 후 속도가 여전히 최대 속도 설정값보다 크면 소프트웨어는 해당 동작이 로봇 싱귤래리티를 유발한다고 판단하며, 로봇은 싱귤래리티 감지를 통과할 수 없습니다.
감속 후 속도 = 원래 속도 × 감속비 -
설정 방법
-
감지 방식의 드롭다운 목록에서 각 관절의 속도를 감지하기를 선택합니다.
-
최대 속도와 감속비 파라미터를 설정합니다.
-
특정 관절의 각도를 감지하기
-
설명
로봇이 직선 운동을 실행할 때 Mech-Viz는 특정 관절 각도가 설정 범위(각도 하한과 각도 상한으로 결정됨) 안에 있는지 감지합니다. 관절 각도가 설정 범위 안에 있으면 소프트웨어는 해당 동작이 로봇 싱귤래리티를 유발한다고 판단하며, 로봇은 싱귤래리티 감지를 통과할 수 없습니다.
-
설정 방법
-
감지 방식의 드롭다운 목록에서 특정 관절의 각도를 감지하기를 선택합니다.
-
관절을 선택하기 드롭다운에서 관절을 선택합니다.
-
각도 하한과 각도 상한을 설정합니다.
-
각 관절의 속도와 특정 관절의 각도를 감지하기
-
설명
Mech-Viz는 "각 관절의 속도를 감지하기"와 "특정 관절의 각도를 감지하기" 두 옵션의 감지를 동시에 수행합니다. 위의 각 관절 속도 감지와 특정 관절 각도 감지 설명을 참조하십시오.
로봇이 위 두 옵션 중 어느 하나라도 통과하지 못하면 소프트웨어는 해당 동작이 로봇 싱귤래리티를 유발한다고 판단하며, 로봇은 싱귤래리티 감지를 통과할 수 없습니다.
-
설정 방법
-
감지 방식의 드롭다운 목록에서 각 관절의 속도와 특정 관절의 각도를 감지하기를 선택합니다.
-
위의 "각 관절의 속도를 감지하기"와 "특정 관절의 각도를 감지하기" 설명을 참조하여 최대 속도, 감속비, 관절을 선택하기, 각도 하한, 각도 상한을 설정합니다.
-
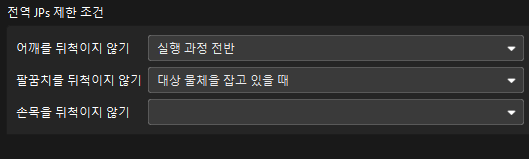
전역 JPs 제한 조건
|
전역 JPs 제한 조건 설정은 이동 유형 스텝 파라미터 영역에서 관절 각도 제한 조건의 해당 항목이 자동으로 설정된 경우에만 적용됩니다. |
-
어깨/팔꿈치/손목을 뒤집지 않기
대상 물체를 잡고 있을 때 또는 전체 실행 과정 상태에서 로봇의 불필요한 뒤집힘을 줄일 수 있습니다.
로봇의 불필요한 뒤집힘을 줄이려면 어깨를 뒤집지 않기를 전체 실행 과정으로, 팔꿈치를 뒤집지 않기를 대상 물체를 잡고 있을 때로, 손목을 뒤집지 않기를 비움으로 설정하는 것을 권장합니다.
인접한 두 웨이 포인트의 목표 유형이 다를 때 손목을 뒤집지 않기를 강제로 설정하면 아래 표와 같이 더 큰 뒤집힘이 발생할 수 있습니다.
| 손목을 뒤집지 않기를 설정하지 않음 | 전체 실행 과정에서 손목을 뒤집지 않기 |
|---|---|
|
|