Mech-Viz에서 빈 포즈를 업데이트하는 방법은 무엇인가요?
| 먼저 프로젝트 리소스 트리에서 빈의 시나리오 물체가 추가되었는지 빈의 물체 이름이 해당 Mech-Vision 피킹 솔루션에 사용된 빈 이름과 일치한지 확인합니다. 그 다음 시나리오 모델을 빈으로 선택하고 빈의 실제한 치수와 두께를 입력합니다. |
다음 두 가지 방법을 사용하면 빈 포즈를 동적으로 업데이트할 수 있습니다.
방법1: "비전 이동" 스텝의 "비전으로 빈 포즈 업데이트" 기능을 사용하기
-
비전 이동스텝의 파라미터 편집 영역에서 보조 기능 > 비전으로 상자 재배치의 비전으로 빈 포즈 업데이트를 선택합니다.
-
Mech-Vision에서 빈 인식을 위한 비전 프로젝트를 열고 출력 스텝의 파라미터를 설정합니다.
포트 유형이 사용자 정의 또한 사전 정의(비전 결과)인 경우 출력 스텝에서 빈 이름, 포즈, 치수를 입력할 수 있는 포트를 추가할 수 있습니다.
포트 유형은 사용자 정의인 경우
-
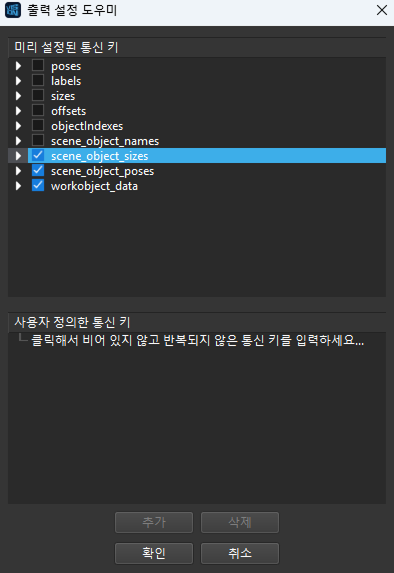
편집기를 열기를 클릭하고 scene_object_names, scene_object_sizes, scene_object_poses를 선택합니다. 이 세 가지 통신 키는 Mech-Viz에서 시나리오 물체의 이름, 치수, 포즈에 해당합니다. scene_object_names를 선택한 후 필요에 따라 scene_object_sizes와 scene_object_poses를 선택할 수 있습니다. scene_object_names만 선택하면 시나리오 물체 업데이트스텝은 실패 아웃 포트에 따라 실행합니다.
-
창에서 확인을 클릭합니다.
포트 유형은 사전 정의(비전 결과)인 경우
-
시나리오 물체 업데이트 설정 아래의 시나리오 물체 업데이트를 선택하세요.
-
새로 추가한 포트를 해당 스텝에 연결하여 시나리오 물체(빈)의 이름, 치수, 포즈를 Mech-Viz로 출력합니다.
-
방법2: "시나리오 물체 업데이트" 스텝을 사용하기
|
-
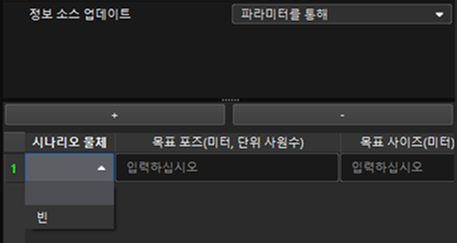
시나리오 물체 업데이트 스텝의 정보 소스 설정은 파라미터를 통해일 경우 빈의 포즈와 치수는 설정된 목표 포즈와 목표 치수로 업데이트됩니다.
+를 클릭하고 시나리오 물체 바에서 업데이트해야 할 빈을 선택하세요. 그 다음 목표 포즈와 목표 치수를 입력합니다. 목표 포즈의 포맷은 X, Y, Z(단위: m) 및 사원수 총 7개 숫자이며 목표 치수는 X, Y, Z 방향의 치수(단위: m) 데이터입니다.
-
시나리오 물체 업데이트 스텝의 정보 소스 설정은 비전 서비스를 통해일 경우 지정된 Mech-Vision 프로젝트의 인식 결과에 따라 빈 포즈가 업데이트됩니다.
-
Mech-Viz시나리오 물체 업데이트 스텝의 비전 서비스 명칭 파라미터에서 빈 인식을 위한 비전 프로젝트를 선택합니다.
-
Mech-Vision에서 빈 인식을 위한 비전 프로젝트를 열고 출력 스텝의 파라미터를 설정합니다.
포트 유형이 사용자 정의 또한 사전 정의(비전 결과)인 경우 출력 스텝에서 빈 이름, 포즈, 치수를 입력할 수 있는 포트를 추가할 수 있습니다.
포트 유형은 사용자 정의인 경우
-
편집기를 열기를 클릭하고 scene_object_names, scene_object_sizes, scene_object_poses를 선택합니다. 이 세 가지 통신 키는 Mech-Viz에서 시나리오 물체의 이름, 치수, 포즈에 해당합니다. scene_object_names를 선택한 후 필요에 따라 scene_object_sizes와 scene_object_poses를 선택할 수 있습니다. scene_object_names만 선택하면 시나리오 물체 업데이트스텝은 실패 아웃 포트에 따라 실행합니다.
-
창에서 확인을 클릭합니다.
포트 유형은 사전 정의(비전 결과)인 경우
-
시나리오 물체 업데이트 설정 아래의 시나리오 물체 업데이트를 선택하세요.
-
새로 추가한 포트를 해당 스텝에 연결하여 시나리오 물체(빈)의 이름, 치수, 포즈를 Mech-Viz로 출력합니다.
-
-
사사용 권장사항
-
빈 포즈가 피킹할 때마다 바뀔 수 있으면 비전 이동 스텝의 "비전으로 빈 포즈 업데이트" 기능을 사용하는 것을 권장합니다. (즉 방법 1) 매번 피킹 전에 빈 포즈를 동적으로 업데이트합니다.
-
빈 포즈를 한 번만 업데이트하는 경우 시나리오 물체 업데이트 스텝을 사용하는 것을 권장합니다. (즉 방법 2) 예를 들어, 피킹 전에 빈의 위치를 먼저 지정하고, 피킹하는 과정에서 빈이 더 이상 움직이지 않는다면 매번 피킹 전에 빈의 포즈를 업데이트할 필요가 없습니다. 현장에서 다양한 치수의 빈을 사용하는 경우, 방법 2를 사용하여 빈을 인식하기 위한 별도의 비전 프로젝트를 구축할 수 있으며, 이를 통해 대상 물체를 인식하기 위한 비전 프로젝트 논리를 간소화하고 인식 효율성을 높일 수 있습니다.
-
Mech-Viz에서 생성된 빈 유형의 시나리오 물체의 포즈는 빈의 기하학적 중심(즉, 빈 내부)에 위치합니다. 그러나 Mech-Vision가 일반적으로 인식된 빈의 윗면 오픈 엔드 형태를 기반으로 빈의 포즈를 계산하며, 계산된 포즈는 빈 윗면의 기하학적 중심점에 위치합니다. 이때 Mech-Vision의 출력 스텝을 사용하여 빈 포즈를 Mech-Viz에 전송하고 업데이트하려면 일반적으로 먼저 지정한 방향을 따라 포즈를 평행이동하기스텝을 사용하여 빈 윗면의 포즈를 빈 전체의 기하학적 중심점에 맞춥니다.
-
시나리오 물체 업데이트 스텝을 사용하여 비전 서비스를 통해 빈 포즈를 획득할 때 비전 인식 스텝은 비전 서비스를 호출해야 합니다. 이때 동일한 Mech-Vision 프로젝트를 사용하여 빈과 대상 물체를 인식하고 시나리오 물체 업데이트 스텝과 비전 이동 스텝 사이에 다른 비전 인식 스텝이 없는 경우(아래 그림 참조), 시나리오 물체 업데이트 스텝에서 비전 결과가 소모하게 되어 후속 비전 이동 스텝에서 사용 가능한 비전 결과가 없기 때문에 오류가 발생합니다.
