빈 내 스마트 경로 이동
사용 전제 조건
|
빈에서 스마트 경로 이동 스텝은 2개의 웨이 포인트에 해당합니다. 피킹 단계가 피킹 전일 때, 해당되는 웨이 포인트는 접근 포인트와 Enter-bin 포인트입니다. 피킹 단계가 피킹 후일 때, 해당되는 웨이 포인트는 출발 포인트와 Exit-bin 포인트입니다. 서로 다른 전략은 픽 포인트에 가까운 웨이 포인트에 영향을 미치며, 빈에 들어갈 때는 접근 포인트에, 빈에서 나갈 때는 출발 포인트에 영향을 줍니다. 로봇 통신 프로그램을 작성할 때, 두 개의 웨이 포인트를 수신하는 것이 중요합니다. 상세한 설명은 샘플 프로그램 내용을 참조하십시오. |
응용 시나리오
이 스텝은 빈 피킹 애플리케이션을 위해 설계되었습니다. 빈에 들어가고 나가는 여러 경로를 시도하고 피킹하는 동안 빈과 주변 대상 물체와의 충돌을 피할 수 있으므로 피킹 성공률이 향상됩니다.
파라미터 설명
빈 내 말단장치 회전 허용
이 파라미터를 선택하지 않으면 빈 내 웨이 포인트의 방향이 픽 포인트와 동일합니다. 이 파라미터를 선택하면 소프트웨어가 자동으로 빈 내 웨이 포인트의 방향을 조정하여 로봇 이동 경로를 더 원활하게 합니다. 그러나 로봇 말단장치가 대상 물체를 잡은 상태에서 회전할 수 있으므로 빈 내부 충돌 위험이 커지고 경로 계획 실패 확률도 증가합니다.
세그먼트 1/2의 이동 유형
빈에 들어가는 경로, 즉 피킹 단계를 피킹 전으로 설정한 경우, 세그먼트 1의 운동 유형에는 관절 운동을 선택하고 세그먼트 2의 운동 유형에는 직선 운동을 선택하는 것이 좋습니다.
빈에서 나가는 경로, 즉 피킹 단계를 피킹 후로 설정한 경우, 세그먼트 1의 운동 유형에는 직선 운동을 선택하고 세그먼트 2의 운동 유형에는 관절 운동을 선택하는 것이 좋습니다.
싱귤래리티 피하기
운동 방식이 직선 운동인 경우, 이 기능을 활성화하면 여러 구간의 관절 운동으로 직선 운동을 시뮬레이션하여 싱귤래리티 문제를 일정 수준 줄일 수 있습니다.
파라미터 설정
| 모션 세그먼트 제한 | 특정 수 | 제한 없음 |
|---|---|---|
기능 |
사용자가 지정한 세그먼트 개수의 관절 운동을 사용하여 직선 운동을 시뮬레이션합니다. |
소프트웨어가 직선 운동 시뮬레이션에 필요한 세그먼트 수를 자동으로 계산합니다. |
장점 |
|
|
단점 |
|
|
| 파라미터 | 설명 |
|---|---|
세그먼트 수 |
모션 세그먼트 제한이 특정 수로 설정될 때, 사용자가 지정한 관절 운동의 세그먼트 수입니다. |
최대 위치 편차 |
직선 운동을 시뮬레이션하는 여러 구간의 관절 운동 경로가 원래 직선 운동 경로에서 허용되는 최대 거리 편차입니다. 최대 위치 편차가 클수록 싱귤래리티 회피 성공률은 높아지지만, 실제 궤적과 직선의 유사도는 낮아집니다. |
최대 각도 편차 |
직선 운동을 시뮬레이션하는 여러 구간의 관절 운동 경로가 원래 직선 운동 경로에서 허용되는 최대 각도 편차입니다. 최대 각도 편차가 클수록 싱귤래리티 회피 성공률은 높아지지만, 실제 궤적과 직선의 유사도는 낮아집니다. |
속도&가속도
속도&가속도는 로봇의 이동 속도를 결정합니다. 일반적으로 가속도 파라미터 값은 속도 값보다 작아야 합니다. 가속도 값이 속도 값보다 크면 로봇 동작이 부자연스러워질 수 있습니다.
| 피킹의 안정성을 높이기 위해 비전 이동 및 전후의 운동 속도를 낮추는 것이 권장됩니다. |
회전 반경
일반적으로 조절할 필요가 없고 기본 파라미터를 사용합니다.
-
회전 반경은 웨이 포인트와 로봇이 회전을 시작하는 지점 사이의 거리를 의미합니다. 회전 반경이 클수록 로봇 이동이 더 부드러워집니다. 로봇이 비교적 좁은 공간에서 이동하는 경우 회전 반경을 더 작은 값으로 설정하십시오.
-
로봇이 넓은 공간에서 작업하고 장애물이 없으며 두 경로 사이의 거리가 큰 경우에는 회전 반경을 적절히 크게 조정하여 로봇 동작을 더 부드럽게 만들 수 있습니다.
빈 선택
프로젝트 리소스 트리에서 장면 물체에 추가된 빈을 선택합니다. 구체적인 수행 방법은 장면 물체 추가 내용을 참조하십시오.
전략 모드
-
Auto를 선택할 때 소프트웨어는 대상 물체 피킹 경로를 자동으로 계산합니다.
Auto 모드의 피킹 전략은 아래 표와 같습니다.
빈에 들어가는 전략 빈에서 나가는 전략 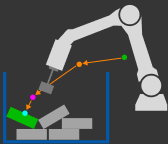
픽 포인트의 Z방향을 따라 접근하기: 대상 물체 픽 포인트의 Z축을 따라 대상 물체 위에서 충돌 없는 위치를 찾아봅니다.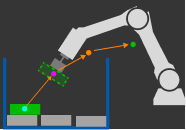
빈 벽에서 들어 올리기: 빈의 내벽과의 충돌을 피하기 위해 대상 물체를 빈의 윗면 중앙으로 들어 올리려고 시도합니다.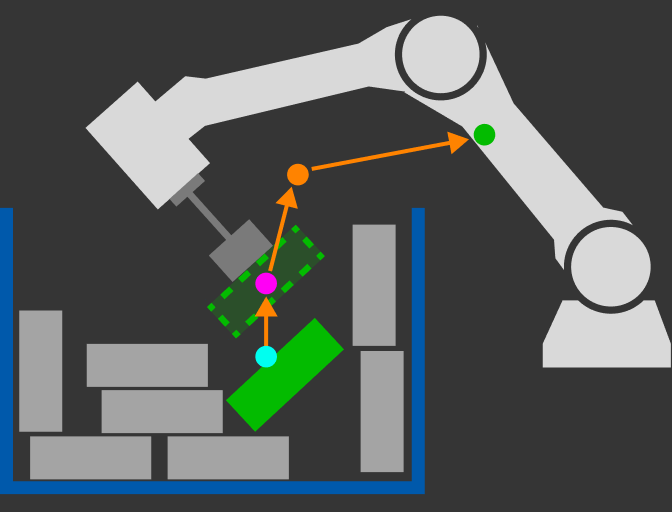
세계 기준 좌표계의 Z방향을 따라 들어 올리기: 세계 기준 좌표계의 Z축을 따라 대상 물체를 들어 올리려고 시도합니다. -
수동을 선택하면 적어도 하나의 피킹 전략을 선택해야 합니다. 시도 전략, 각 전략의 시도 순서 및 서로 다른 전략에서 로봇의 이동 거리 등을 사용자 정의할 수 있습니다. 자동에 비해, 수동 모드에 픽 포인트의 Z방향을 따라 들어 올리기 및 수평으로 드래그 두 가지 전략이 추가되었습니다.
다음 상황에서 수동 모드를 사용하는 것이 좋습니다.
-
로봇이 픽 포인트의 Z축 방향을 따라 빈에서 나가야 하는 경우, 픽 포인트의 Z방향을 따라 들어 올리기 전략을 사용할 수 있습니다.
-
로봇이 겹쳐진 대상 물체를 수평으로 드래그해야 하는 경우, 수평으로 드래그 전략을 사용할 수 있습니다.
-
대상 물체의 높이가 상대적으로 높고 소프트웨어에서 자동으로 계산된 리프팅 시도 거리가 부족한 경우, 리프팅 시도 거리 파라미터를 수동으로 설정해야 합니다.
-
사이클 시간을 개선하기 위해, 빈에서 나가는 전략은 하나만 사용하는 것을 권장합니다.
수동 모드의 피킹 전략은 아래 표와 같습니다.
빈에 들어가는 전략 빈에서 나가는 전략
픽 포인트의 Z방향을 따라 접근하기: 대상 물체 픽 포인트의 Z축을 따라 대상 물체 위에서 충돌 없는 위치를 찾아봅니다. 최대 5개의 물체 위의 거리를 설정할 수 있으며, 소프트웨어는 설정된 거리에 따라 차례로 시도합니다.
빈 벽에서 들어 올리기: 빈의 내벽과의 충돌을 피하기 위해 대상 물체를 빈의 윗면 중앙으로 들어 올리려고 시도합니다. 최대 5개의 리프팅 시도 거리를 설정할 수 있으며, 소프트웨어는 설정된 거리에 따라 차례로 시도합니다.
세계 기준 좌표계의 Z방향을 따라 들어 올리기: 세계 기준 좌표계의 Z축을 따라 대상 물체를 들어 올리려고 시도합니다. 최대 5개의 리프팅 시도 거리를 설정할 수 있으며, 소프트웨어는 설정된 거리에 따라 차례로 시도합니다.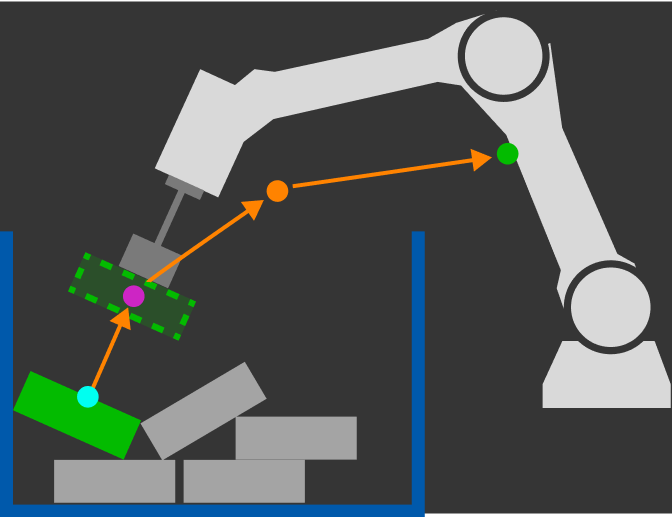
픽 포인트의 Z방향을 따라 들어 올리기: 대상 물체 픽 포인트의 Z방향을 따라 들어 올리려고 시도합니다. 최대 5개의 리프팅 시도 거리를 설정할 수 있으며, 소프트웨어는 설정된 거리에 따라 차례로 시도합니다.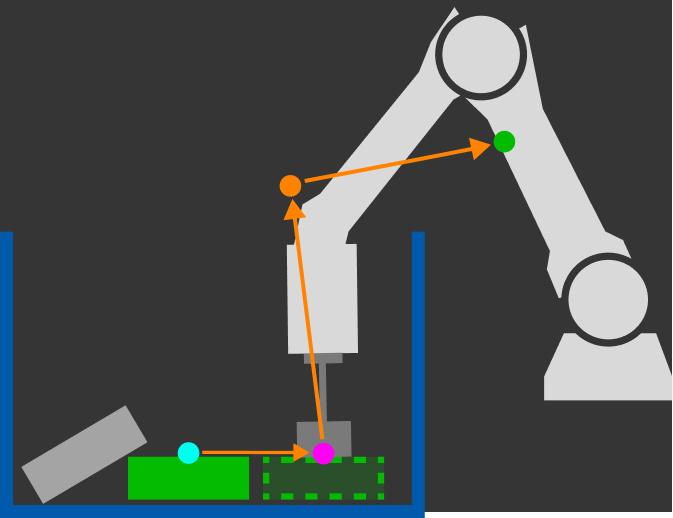
수평으로 드래그: 대상 물체의 픽 포인트가 있는 수평면에서 대상 물체를 빈의 중앙으로 드래그해 봅니다. 최대 5개의 드래그 시도 거리를 설정할 수 있으며, 소프트웨어는 설정된 거리에 따라 차례로 시도합니다.
-
응용 예시
"빈 내 스마트 경로 이동" 샘플 프로젝트 매뉴얼 내용을 참조하십시오.