응용 예시
볼록 모델을 생성하는 데 필요한 시간을 줄이고 충돌 감지가 효율적이고 안전하며 정확하게 이루어지도록 하기 위해, 다음 원칙을 바탕으로 원본 모델을 간소화할 수 있습니다.
-
볼록 껍질 모델을 만들기 전에 먼저 원본 모델을 평가하여 각 부분의 기능과 역할을 명확히 한 다음, 각 구조에 대한 볼록 껍질을 구성하는 것을 권장합니다.
-
효과적인 충돌 감지를 보장하기 위해 대상 물체와 접촉하거나 충돌 가능성이 높은 볼록 껍질 모델의 부분은 실제 물체의 구조와 최대한 일치하도록 정확하게 제작되어야 합니다. 대상 물체와 접촉하지 않고 로봇에 연결되지 않은 볼록 껍질 모델의 부분(카메라, 센서, 커넥터 등)은 볼록 껍질을 실제 물체보다 약간 크게 하여 대략적으로 모델링할 수 있습니다.
-
3차원 공간에서 볼록 껍질은 포인트 집합을 완전히 둘러싸는 최소한의 볼록 다면체이며, 가장자리는 포인트 집합 중 외부에 위치한 포인트들로 형성됩니다. 가장자리 픽셀 포인트를 너무 많이 선택하면 생성된 볼록 껍질이 과도하게 커질 수 있으며, 너무 적게 선택하면 볼록 껍질이 불완전해질 수 있습니다. 실제 상황에 따라 선택된 범위를 조정하여 적절한 크기의 볼록 껍질이 생성되도록 하십시오.
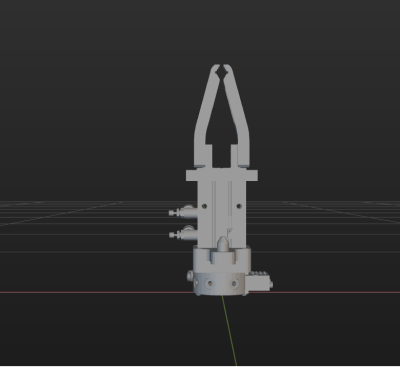
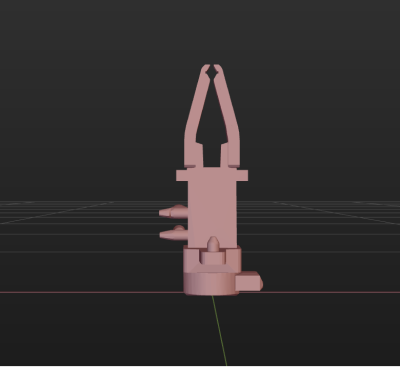
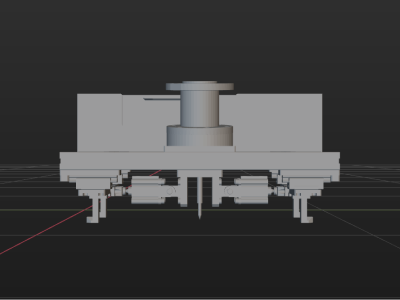
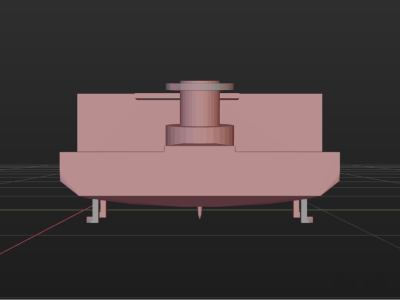
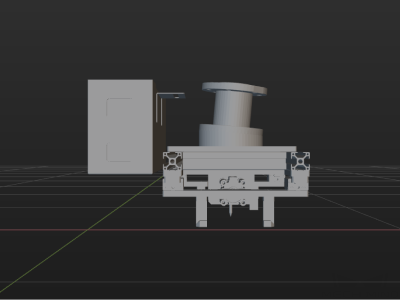
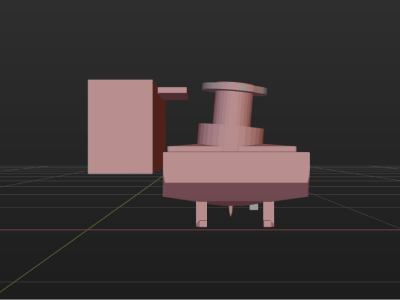
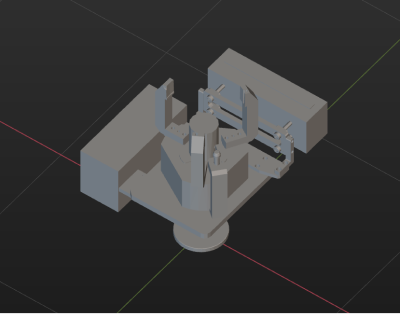
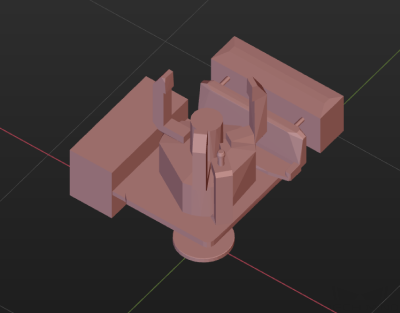
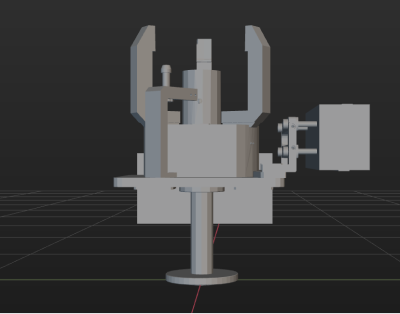
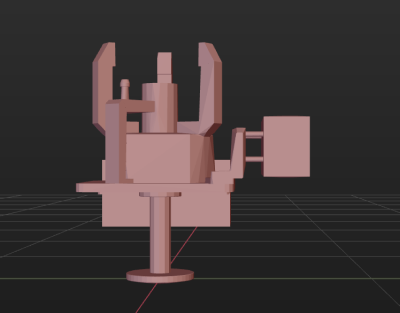
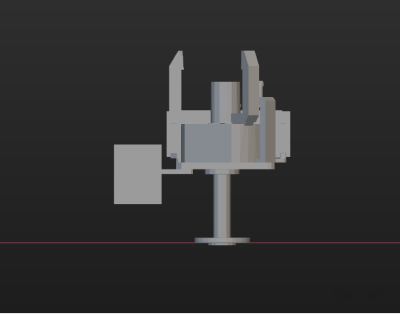
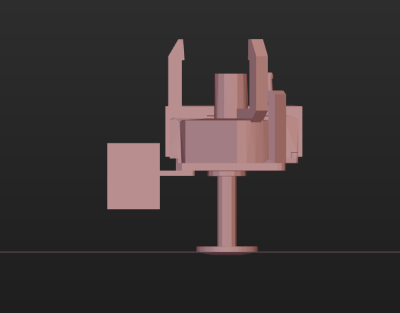
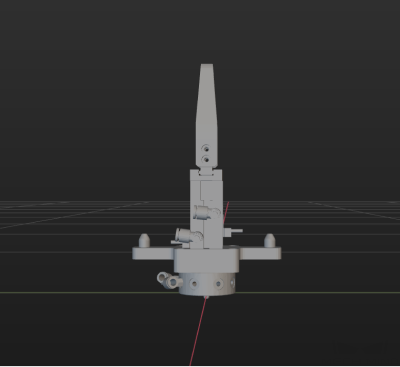
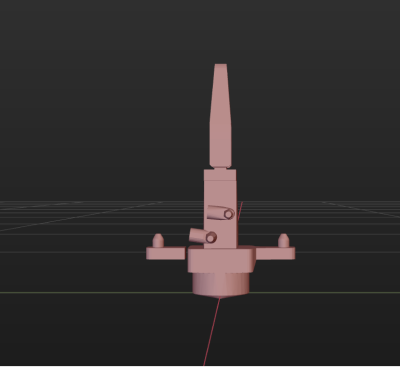
볼록 껍질이 생성되기 전과 후의 말단장치 모델을 보여주는 아래 예시를 참조하십시오.
-
예시 1:
뷰 편집 전 편집 후 사용자 정의 뷰
정면도
측면도
-
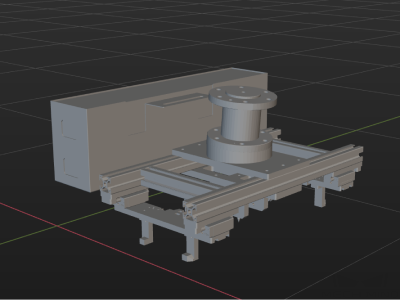
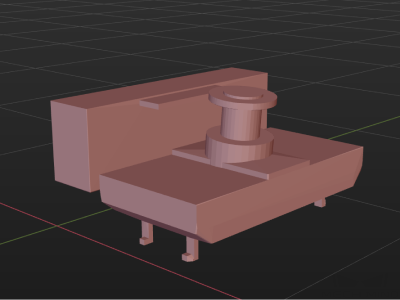
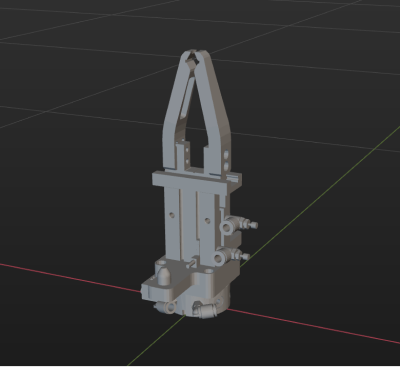
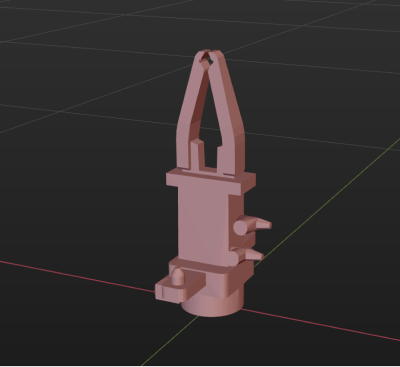
예시 2:
뷰 편집 전 편집 후 사용자 정의 뷰
정면도
측면도
-
예시 3:
뷰 편집 전 편집 후 사용자 정의 뷰
정면도
측면도