응용 예시
말단장치에 대한 충돌 모델을 생성할 때 시간을 절약하기 위해 생성한 볼록 껍질이 원본 모델의 모든 세부 사항을 완벽하게 복제하는 것이 항상 필요한 것은 아닙니다. 모델의 특정 요구 사항에 따라 일부 세부 정보를 생략할 수도 있습니다.
볼록 껍질 모델을을 만들기 전에 먼저 모델을 평가하여 각 부분의 기능을 명확히 한 다음, 각 구조에 대한 볼록 껍질을 구성합니다. 효과적인 충돌 감지를 보장하기 위해 대상 물체와 접촉하는 볼록 껍질 모델의 부분(그리퍼 및 플랜지 커넥터 등)은 실제 물체의 구조와 최대한 일치하도록 정확하게 제작되어야 합니다. 대상 물체와 접촉하지 않고 로봇에 연결되지 않은 볼록 껍질 모델의 부분(카메라, 센서, 커넥터 등)은 볼록 껍질을 실제 물체보다 약간 크게 하여 대략적으로 모델링할 수 있습니다.
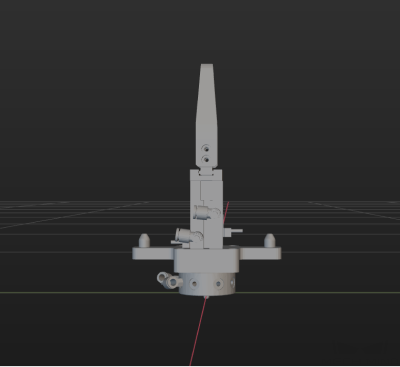
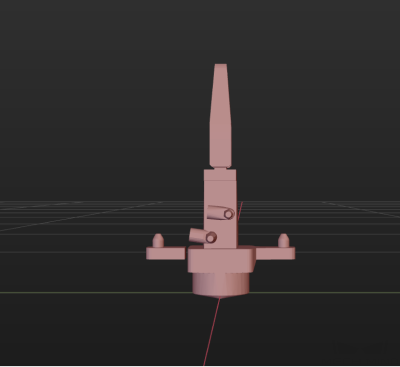
볼록 껍질이 생성되기 전과 후의 말단장치 모델을 보여주는 아래 예시를 참조하십시오.
-
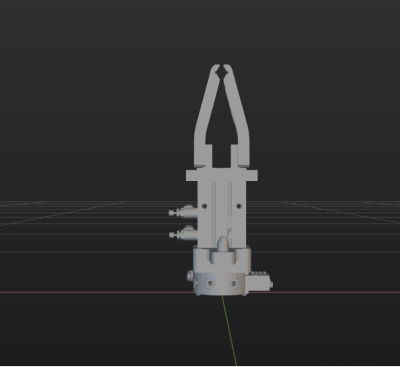
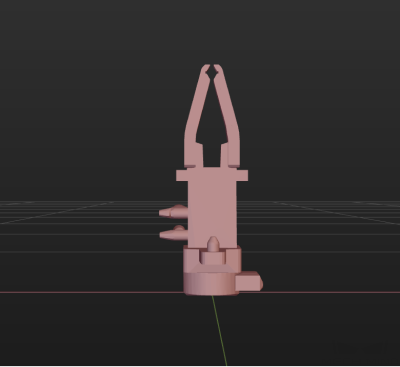
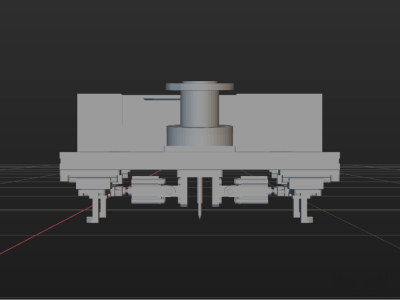
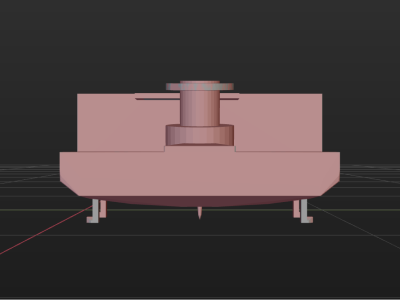
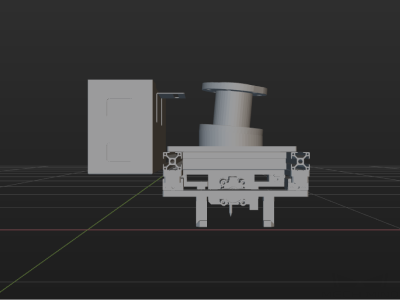
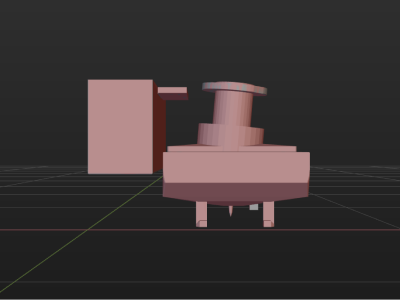
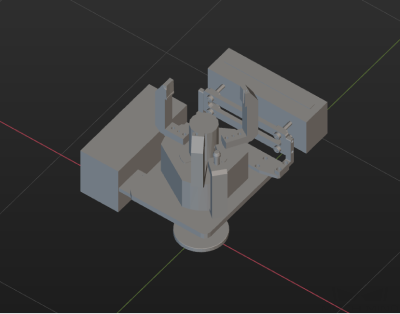
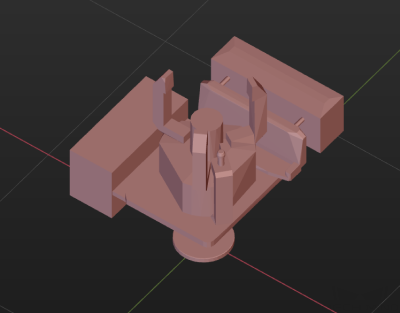
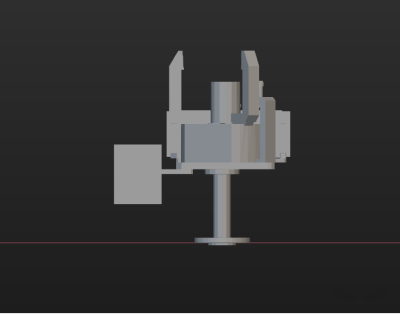
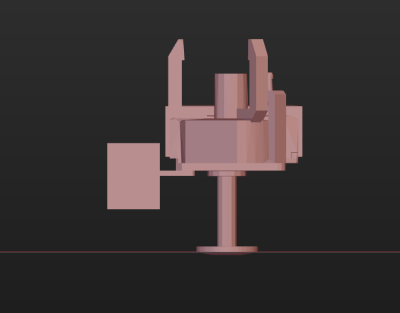
예시 1:
뷰 편집 전 편집 후 사용자 정의 뷰
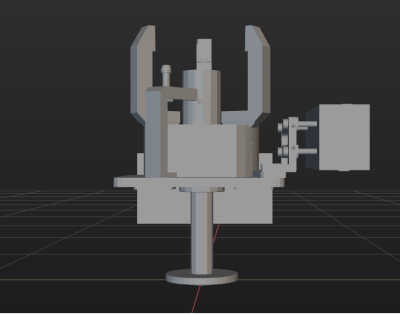
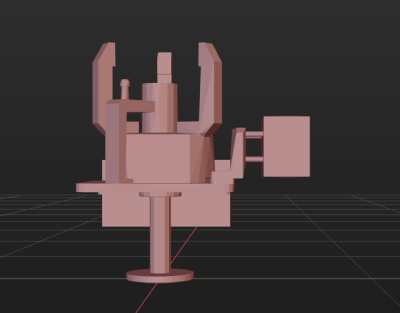
정면도
측면도
-
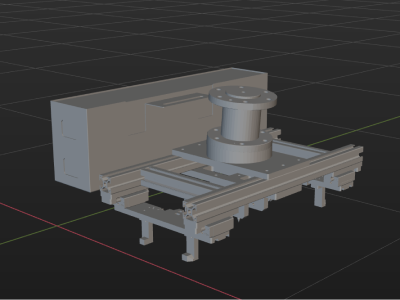
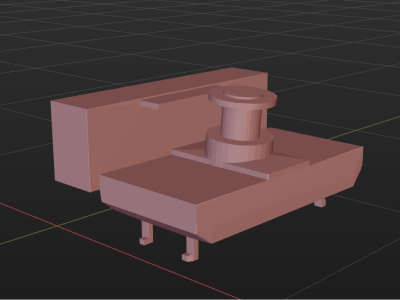
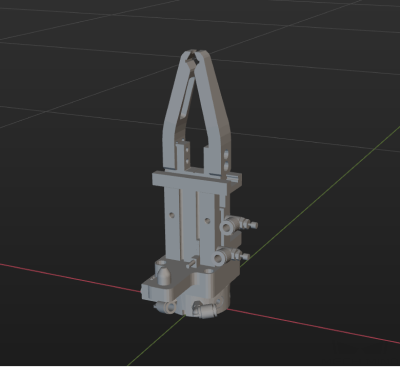
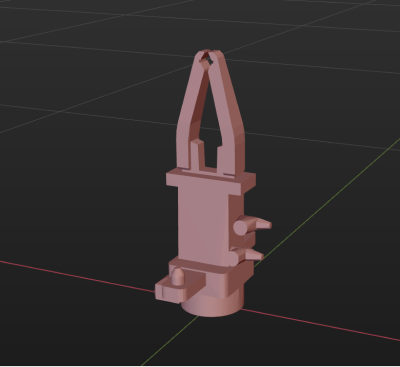
예시 2:
뷰 편집 전 편집 후 사용자 정의 뷰
정면도
측면도
-
예시 3:
뷰 편집 전 편집 후 사용자 정의 뷰
정면도
측면도