호환 모드 설명
호환 모드에서는 일부 로봇에 대해 다음과 같은 문제가 존재합니다. 실제 로봇의 포즈가 소프트웨어 시뮬레이션 인터페이스에서 시뮬레이션 로봇의 포즈와 동기화될 때 티치 펜던트에 표시된 로봇 말단장치 포즈가 소프트웨어 화면에 표시된 말단장치 포즈의 값과 일치하지 않습니다. 이 문제는 FANUC 4/5/6 축 전체 로봇, YASKAWA 4/5/6 축 전체 로봇, KAWASAKI R 시리즈의 6축 로봇, 6축 STAUBLI 전체 로봇, AUBO 및 HANS 전체 로봇에서 발생합니다.
호환 모드에서는 소프트웨어가 표준 인터페이스나 마스터 컨트롤을 통해 로봇과 통신할 때, 말단장치 포즈의 차이가 자동으로 보정됩니다. 하지만 수동 캘리브레이션, 수동 픽 포인트 티칭, Adapter를 통해 말단장치 포즈의 형식으로 계획 및 인식 결과를 로봇에 보낼 때, 말단장치 포즈의 차이는 수동으로 보정해야 합니다.
수동 보정이 필요한 시나리오
| FANUC 4/5/6 축 전체 로봇, YASKAWA 4/5/6 축 전체 로봇, KAWASAKI R 시리즈의 6축 로봇, 6축 STAUBLI 전체 로봇, AUBO 및 HANS 전체 로봇을 사용하는 경우, 수동 캘리브레이션, 수동 픽 포인트 티칭, Adapter 통신 과정에서 차이를 수동으로 보정해야 합니다. |
수동 캘리브레이션
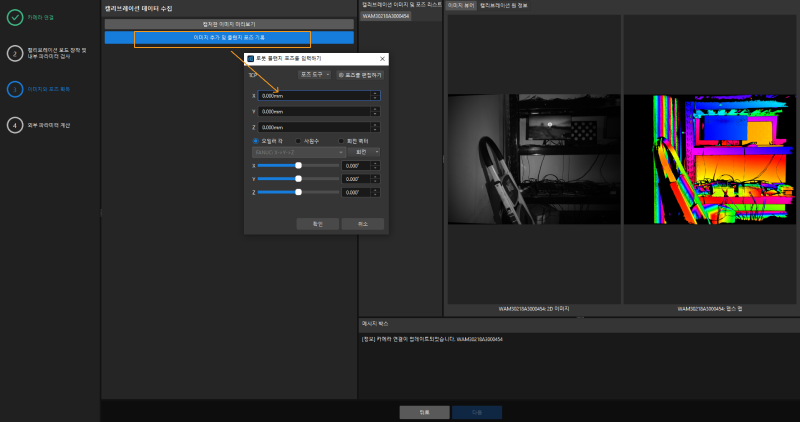
수동으로 캘리브레이션을 수행할 때 이미지 추가 및 플랜지 포즈 기록 버튼을 클릭한 후 로봇 플랜지 포즈를 입력하기 팝업 창에서 로봇 플랜지 포즈를 입력합니다.
티치 펜던트에 표시된 말단장치 포즈의 Z 값에 보정값을 더해야 하며 그 결과는 소프트웨어에서 Z 파라미터로 사용할 수 있습니다.

보정값을 획득하는 방법
다음 방법을 통해 보정값을 획득할 수 있습니다.
-
소프트웨어 시뮬레이션 공간에서 실제 로봇과 시뮬레이션된 로봇을 동기화하고, 보정값은 티치 펜던트에 표시된 로봇 말단장치 포즈와 소프트웨어에 표시되는 로봇 말단장치 포즈 간의 Z값 차이값을 가리킵니다.
아래 예시를 참조하십시오.
|
|
티치 펜던트에 표시된 말단장치 포즈 |
Mech-Viz에 표시된 말단장치 포즈 |
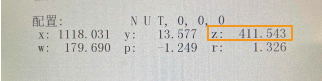
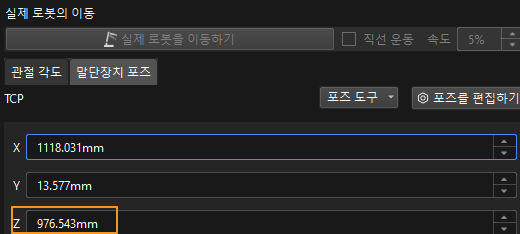
티치 펜던트에 표시된 말단장치 포즈의 Z값은 411.543이고 Mech-Viz에 표시된 말단장치 포즈의 Z값은 976.543이며 보정값은 976.543 - 411.543 = 565 mm입니다.
-
로봇의 파라미터 파일을 확인하여 dh 파라미터(dh1)의 첫 번째 값 또는 파라미터 파일의 Zoffset 값은 바로 보정값입니다.
아래 예시를 참조하십시오.
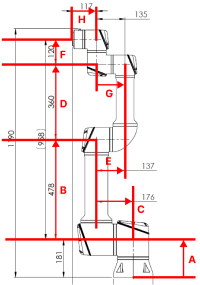
UR_16E_algo.json 파일에 표시된 바와 같이 dh1이 A에 해당한다는 것을 알고 있습니다. dh 파라미터 사양을 확인하면 A가 181mm인 것을 알 수 있으므로 보정값은 181mm입니다.
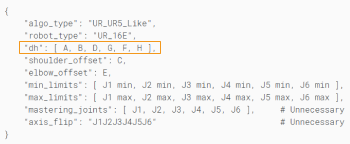
UR_16E_algo.json
dh 파라미터 사양