DO 설정
| v1.8.0 버전부터 DO 설정 스텝과 DO 리스트 설정 스텝은 새로운 DO 설정 스텝으로 병합했습니다. |
기능 설명
로봇 산업에서 “DO”는 일반적으로 디지털 출력을 나타냅니다. DO는 자동화 시스템의 장치나 구성 요소를 컨트롤하는 데 사용되는 전기 신호 유형입니다. 이러한 디지털 출력 신호는 더 높거나 더 낮은 전압 레벨로 표시되며 연결된 장치 또는 액추에이터를 활성화하거나 비활성화하는 데 사용됩니다. 이러한 장치에는 진공 그리퍼, 모터, 솔레노이드 밸브, 릴레이, 표시등 및 기타 유형의 전기 부품이 포함됩니다.
이 스텝은 신호를 전송하여 외부 장치가 그리퍼 핑거의 열기/닫기, 진공 그리퍼의 켜기/끄기 등 작업을 수행할 수 있도록 하고 컨베이어 벨트를 컨트롤하거나 알람을 트리거하는 데에도 사용될 수 있습니다.
파라미터 설명
통신 설정
실세 상황에 따라 DO 신호의 수신자를 설정하세요. 로봇에 전송과 Adapter에 전송을 동시에 선택할 수 있습니다.
Adapter에 전송을 선택하면 Adapter 서비스 명칭을 입력해야 합니다.
| 통신 설정을 구성하지 않으면, DO 신호는 소프트웨어에서 수신 대상으로 전송될 수 없습니다. |
신호 소스
비전 이동 또는 수동 설정을 선택할 수 있습니다.
비전 이동
상자 디팔레타이징 또는 말단장치가 여러 개 있는 응용 시나리오에 적용됩니다. 소프트웨어는 해당 피킹 방식과 함께 디팔레타이징 진공 그리퍼 또는 멀티 말단장치 구성에 따라 소프트웨어는 활성화되어야 하는 DO 포트 번호를 자동으로 계산합니다.
사용자 정의
설정해야 하는 DO 포트 번호를 수동으로 지정합니다.
-
설정 방법
-
실제로 설정해야 할 포트 수에 따라 +를 클릭하여 포트를 추가하고 구성합니다.
-
외부 장치를 컨트롤하기 위한 포트 번호와 신호 값을 설정하고, 현재 포트의 기능에 대해 설명합니다.
-
포트 번호는 중복될 수 없습니다. 중복된 포트 번호로는 구성할 수 없습니다.
-
각 포트의 기능을 명확히 하기 위해 각 포트에 대한 설명을 추가하는 것이 좋습니다.
-
포트를 선택한 후 - 버튼을 클릭하면 해당 포트의 구성을 삭제할 수 있습니다.
-
-
-
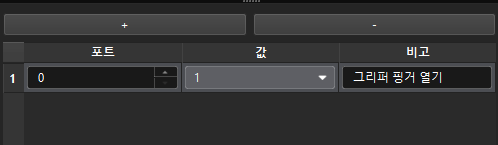
예시
예를 들어 그리퍼를 컨트롤하기 위해 포트 0을 사용하고 신호 값이 1일 때 그리퍼가 핑거를 열면 설정은 다음과 같습니다.