로봇 핸드-아이 캘리브레이션 프로세스 선택
핸드-아이 캘리브레이션은 카메라 좌표계와 로봇 좌표계 간의 해당 관계를 구축하는 과정을 말하며, 비전 시스템에 의해 제공된 물체 포즈를 로봇 좌표계 아래의 포즈로 전환하여 로봇이 피킹 작업을 정확하게 완료하도록 가이드합니다. 핸드-아이 캘리브레이션 결과의 정확도는 로봇의 피킹 정확도에 영향을 미치는 중요한 요소 중 하나입니다.
Mech-Mind 비전 시스템을 구축한 후 로봇의 핸드-아이 캘리브레이션을 수행할 수 있습니다. 또한 다음과 같은 경우 로봇의 핸드-아이 캘리브레이션을 다시 실행해야 합니다.
-
카메라의 위치는 로봇 베이스(카메라 eye to hand 설치 방식) 또는 플랜지(카메라 eye in hand 설치 방식)를 기준으로 변경됩니다.
-
카메라를 교체합니다.
-
로봇을 교체합니다.
적합한 캘리브레이션 프로세스 선택
로봇의 통신 방식, 카메라의 설치 방식, 캘리브레이션 방식 및 캘리브레이션 데이터 수집 방법은 모두 구체적인 캘리브레이션 프로세스에 영향을 미칩니다.Mech-Vision은 다양한 시나리오에 대해 표준화된 캘리브레이션 프로세스를 제공하여 카메라의 내부 및 외부 파라미터를 빠르고 정확하게 캘리브레이션할 수 있습니다.
|
로봇의 통신 방식, 카메라의 설치 방식, 캘리브레이션 방식 및 캘리브레이션 데이터 수집 방법은 캘리브레이션 관련 개념 내용을 참조하십시오. |
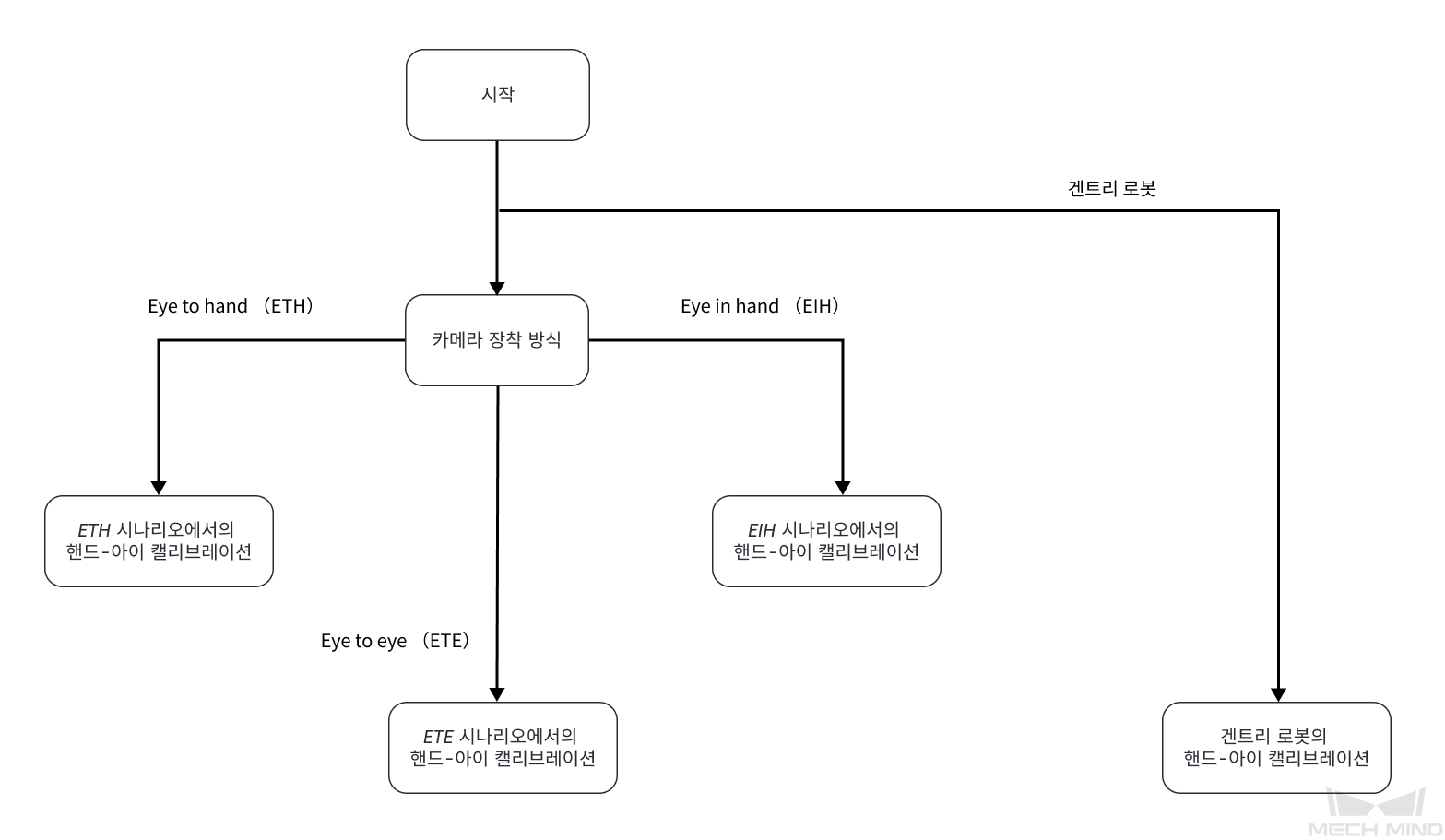
카메라 설치 방식에 따라 해당 캘리브레이션 프로세스를 선택하십시오.
-
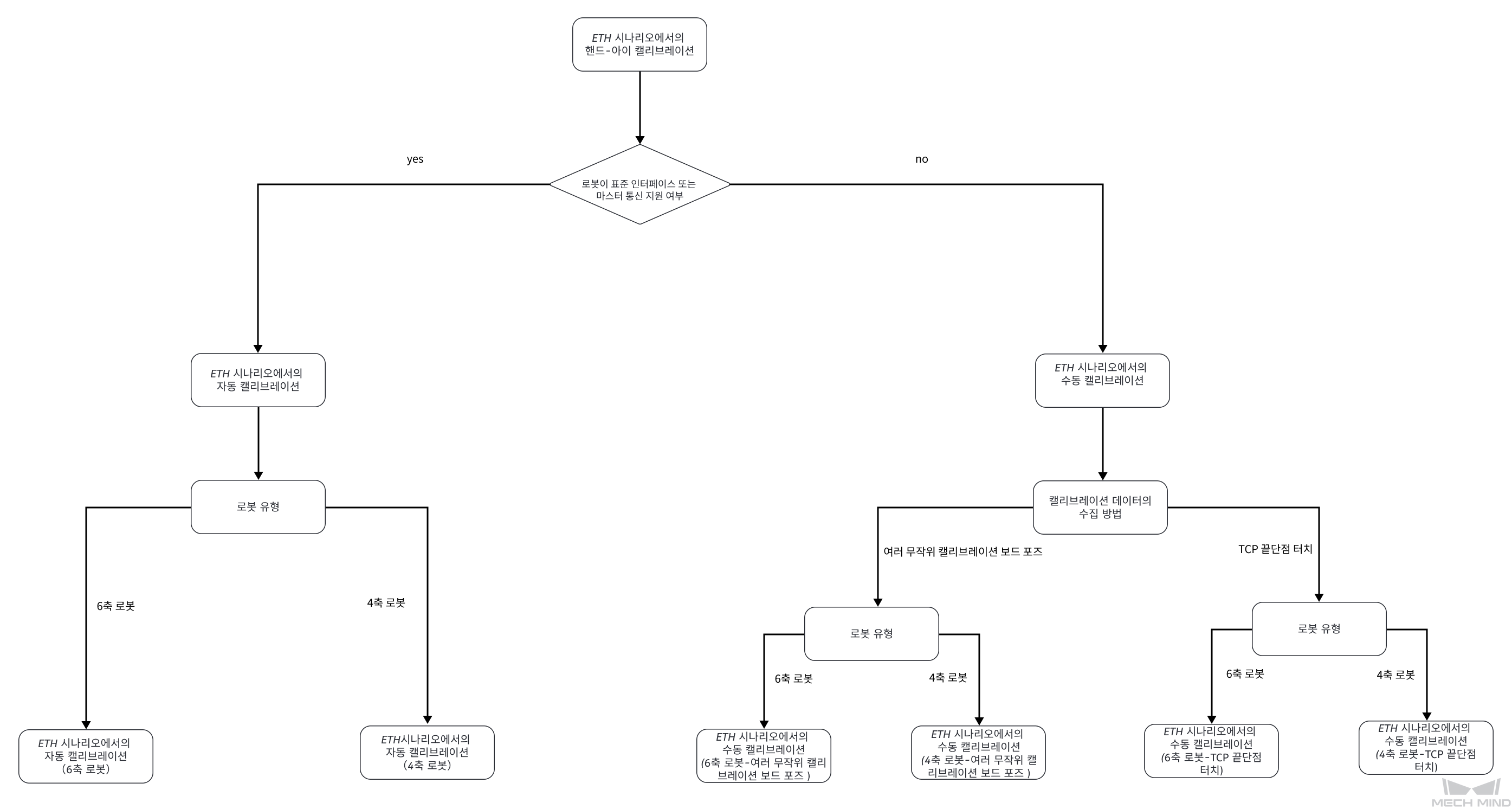
카메라 설치 방식이 ETH(Eye to hand)인 경우 ETH 시나리오에서의 핸드-아이 캘리브레이션 내용을 참고하십시오.
-
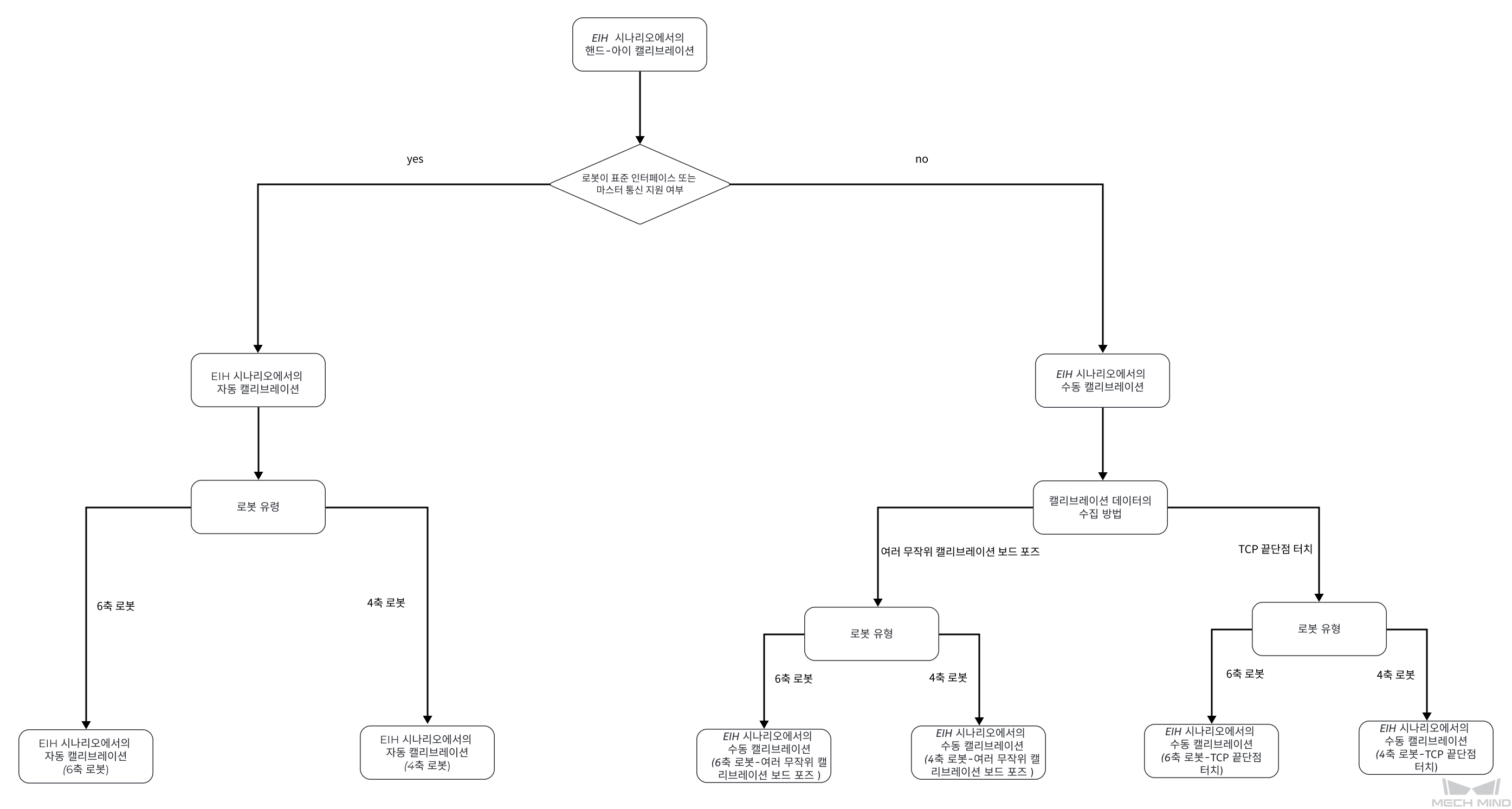
카메라 설치 방식이 EIH(Eye in hand)인 경우 EIH 시나리오에서의 핸드-아이 캘리브레이션 내용을 참고하십시오.
-
카메라 설치 방식이 ETE(Eye to eye)인 경우 ETE 시나리오에서의 핸드-아이 캘리브레이션 프로세스 내용을 참고하여 캘리브레이션을 진행하십시오.
| 프로젝트에서 갠트리 로봇을 사용하는 경우 갠트리 로봇의 핸드-아이 캘리브레이션 프로세스 내용을 참조하여 캘리브레이션을 진행하십시오. |