캘리브레이션 원리
핸드-아이 캘리브레이션은 로봇 및 비전 시스템에서 일반적으로 사용되는캘리브레이션 방법으로, 카메라 좌표계와 로봇 말단 좌표계(일반적으로 말단장치 좌표계) 간의 변환 관계를 결정하는 것이 목적입니다. 핸드-아이 캘리브레이션을 통해 비전 시스템과 로봇 시스템 간의 공간 정보 정렬이 달성되어 비전 가이드 및 위치 지정과 같은 작업 실행을 지원합니다.
이 부분에서는 로봇 핸드-아이 캘리브레이션 중 다양한 포즈나 포인트 간의 관계를 설명합니다.
|
이 부분에서는 포인트와 포즈를 표현하기 위해 서로 다른 형태의 기호를 사용합니다. 대문자 T를 사용하여 포즈를 나타냅니다. 예를 들어 robotTflange는 로봇 베이스(robot)를 기준으로 한 로봇 플랜지(flange)의 포즈를 나타냅니다. 소문자 p를 사용하여 포인트를 나타냅니다. 예를 들어, robotpboard-robot은 로봇 베이스(robot)를 기준으로 한 캘리브레이션 보드(board-robot)의 마커 포인트를 나타냅니다. |
ETH 시나리오에서의 핸드-아이 캘리브레이션(여러 무작위 캘리브레이션 보드 포즈)
ETH 시나리오에서 핸드-아이 캘리브레이션을 위해 '여러 무작위 캘리브레이션 보드 포즈' 방법을 사용할 경우, 카메라, 로봇 베이스, 로봇 플랜지 및 캘리브레이션 보드의 포즈 관계는 아래 그림과 같습니다.
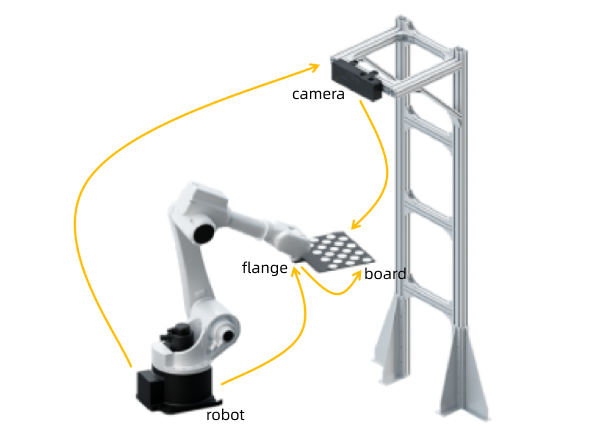
방정식의 형태로 표현된 포즈 간의 관계를 더 잘 이해하려면 아래 표를 참조하여 각 상대 포즈에 대한 표현 방법을 학습해 보세요.
| 포즈 | 관계 | 비고 |
|---|---|---|
robotTflange |
로봇 베이스에 대한 로봇 플랜지의 포즈 |
로봇 측에서 얻을 수 있습니다. |
cameraTboard |
카메라에 대한 캘리브레이션 보드의 포즈 |
카메라로 이미지를 캡처하고 계산하여 얻을 수 있습니다. |
flangeTboard |
로봇 플랜지에 대한 캘리브레이션 보드의 포즈. |
외부 파라미터 캘리브레이션의 상수는 방정식을 수립하는 데 사용됩니다. |
robotTcamera |
로봇 베이스에 대한 카메라의 포즈(외부 파라미터) |
계산할 외부 파라미터 캘리브레이션 결과 |
위 그림과 위의 포즈 관계에 따르면 다음과 같은 방정식을 얻을 수 있습니다.

EIH 시나리오에서의 핸드-아이 캘리브레이션(여러 무작위 캘리브레이션 보드 포즈)
EIH 시나리오에서 핸드-아이 캘리브레이션을 위해 '여러 무작위 캘리브레이션 보드 포즈' 방법을 사용할 경우, 카메라, 로봇 베이스, 로봇 플랜지 및 캘리브레이션 보드의 포즈 관계는 아래 그림과 같습니다.
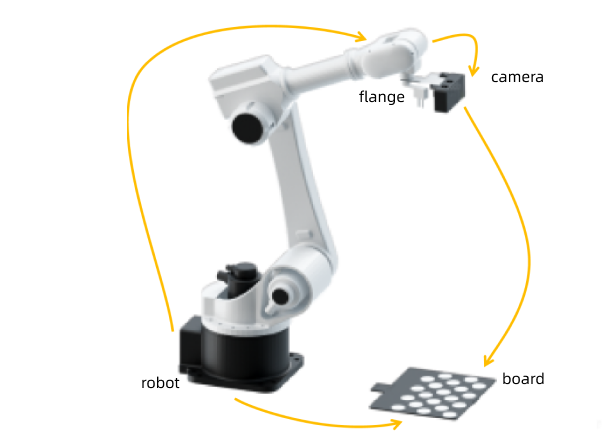
방정식의 형태로 표현된 포즈 간의 관계를 더 잘 이해하려면 아래 표를 참조하여 각 상대 포즈에 대한 표현 방법을 학습해 보세요.
| 포즈 | 관계 | 비고 |
|---|---|---|
robotTflange |
로봇 베이스에 대한 로봇 플랜지의 포즈 |
로봇 측에서 얻을 수 있습니다. |
cameraTboard |
카메라에 대한 캘리브레이션 보드의 포즈 |
카메라로 이미지를 캡처하고 계산하여 얻을 수 있습니다. |
robotTboard |
로봇 베이스에 대한 캘리브레이션 보드의 포즈 |
외부 파라미터 캘리브레이션의 상수는 방정식을 수립하는 데 사용됩니다. |
flangeTcamera |
로봇 플랜지에 대한 카메라의 포즈(외부 파라미터) |
계산할 외부 파라미터 캘리브레이션 결과 |
위 그림과 위의 포즈 관계에 따르면 다음과 같은 방정식을 얻을 수 있습니다.

ETH 시나리오에서의 핸드-아이 캘리브레이션(TCP 끝단점 터치)
'TCP 끝단점 터치' 방법을 사용하여 ETH 시나리오에서의 핸드-아이 캘리브레이션을 진행할 때, 이미지 캡처 및 터치 과정 중 각 포즈/포인트의 상대 관계는 아래와 같이 나타낼 수 있으며, 이를 통해 각 포즈/포인트의 상대 관계를 닫힌 루프 형태로 구성할 수 있습니다.

방정식의 형태로 표현된 포즈 간의 관계를 더 잘 이해하려면 아래 표를 참조하여 각 상대적인 포즈/포안트에 대한 표현 방법을 알아보세요.
| 이미지 캡처 및 터치 | 포즈/포인트 | 관계 | 비고 |
|---|---|---|---|
이미지 캡처 |
camerapboard-point |
카메라 캘리브레이션 보드의 마커 포인트, 마커 포인트와 카메라 간의 관계를 나타냅니다. |
카메라로 이미지를 캡처하고 계산하여 얻을 수 있습니다. |
robotTcamera |
로봇 베이스에 대한 카메라의 포즈(외부 파라미터) |
계산할 외부 파라미터 캘리브레이션 결과. |
|
터치 동작 |
robotTflange |
터치 시 로봇 베이스에 대한 로봇 플랜지의 포즈. |
로봇에서 얻을 수 있습니다. |
flangeptcp |
로봇 공구중심점(TCP). 말단장치의 말단과 플랜지 말단 사이의 관계를 나타냅니다. |
외부 파라미터 캘리브레이션의 상수는 방정식을 수립하는 데 사용됩니다. |
|
robotptcp |
로봇 공구중심점(TCP). 터치 시 TCP와 로봇 베이스의 관계를 나타냅니다. |
flangeptcp 및 robotTflange를 통해 계산될 수 있습니다. |
위 그림과 위에서 언급한 관계에 따라, 이미지 캡처 및 터치 시의 방정식을 각각 구할 수 있습니다.
이미지 캡처 시, 위에서 제시된 관계를 바탕으로 캘리브레이션 보드의 마커 포인트와 로봇 베이스 간의 관계를 계산할 수 있습니다.

터치 시, TCP와 터치포인트가 일치하므로, 위에서 제시된 관계를 통해 캘리브레이션 보드의 마커 포인트와 로봇 베이스 간의 관계를 계산할 수 있습니다.

이 두 방정식을 바탕으로 다음과 같은 등식을 형성할 수 있습니다.

EIH 시나리오에서의 핸드-아이 캘리브레이션(TCP 끝단점 터치)
'TCP 끝단점 터치' 방법을 사용하여 EIH 시나리오에서의 핸드-아이 캘리브레이션을 진행할 때, 이미지 캡처 및 터치 과정 중 각 포즈/포인트의 상대 관계는 아래와 같이 나타낼 수 있으며, 이를 통해 각 포즈/포인트의 상대 관계를 닫힌 루프 형태로 구성할 수 있습니다.

방정식의 형태로 표현된 포즈 간의 관계를 더 잘 이해하려면 아래 표를 참조하여 각 상대적인 포즈/포안트에 대한 표현 방법을 알아보세요.
| 이미지 캡처 및 터치 | 포즈 | 관계 | 비고 |
|---|---|---|---|
이미지 캡처 |
robotTflange-capture |
이미지 캡처 시 로봇 베이스에 대한 로봇 플랜지의 포즈. |
로봇에서 얻을 수 있습니다. |
flange-captureTcamera |
로봇 플랜지에 대한 카메라의 포즈(외부 파라미터) |
계산할 외부 파라미터 캘리브레이션 결과. |
|
camerapboard-point |
카메라 캘리브레이션 보드의 마커 포인트, 마커 포인트와 카메라 간의 관계를 나타냅니다. |
카메라로 이미지를 캡처하고 계산하여 얻을 수 있습니다. |
|
터치 동작 |
robotTflange-touch |
터치 시 로봇 베이스에 대한 로봇 플랜지의 포즈. |
로봇에서 얻을 수 있습니다. |
flange-touchptcp |
로봇 공구중심점(TCP). 말단장치의 말단과 플랜지 말단 사이의 관계를 나타냅니다. |
외부 파라미터 캘리브레이션의 상수는 방정식을 수립하는 데 사용됩니다. |
|
robotptcp |
로봇 공구중심점(TCP). 터치 시 TCP와 로봇 베이스의 관계를 나타냅니다. |
robotTflange-touch 및 flangeptcp를 통해 계산될 수 있습니다. |
위 그림과 위에서 언급한 관계에 따라, 이미지 캡처 및 터치 시의 방정식을 각각 구할 수 있습니다.
이미지 캡처 시, 위 관계를 바탕으로 캘리브레이션 보드의 마커 포인트와 로봇 베이스 간의 관계를 계산할 수 있습니다.

터치 시, TCP와 터치포인트가 일치하므로, 위에서 제시된 관계를 통해 캘리브레이션 보드의 마커 포인트와 로봇 베이스 간의 관계를 계산할 수 있습니다.

이 두 방정식을 바탕으로 다음과 같은 등식을 형성할 수 있습니다.
