카메라 마운팅 브래킷 설계
카메라 마운팅 브래킷 형태
카메라 장착 방식에 따라 다른 마운팅 브래킷이 사용되며, 자세한 내용은 아래 표를 참조하십시오.
Eye to hand(ETH) |
알루미늄 프로파일 브래킷
|
|---|---|
Eye in hand(EIH) |
카메라는 로봇의 J6 축 플랜지 위에 있음
|
다양한 형태의 브라켓의 설계 요구 사항과 적용 가능한 시나리오는 Eye to Hand - 마운팅 브라켓의 설계 및 설치 와 Eye in Hand - 마운팅 브라켓의 설계 및 설치를 참조하십시오.
Eye to Hand - 마운팅 브래킷의 설계 및 설치
| Eye to Hand 시나리오에서 마운팅 브래킷을 설계할 때, 카메라 케이블의 정렬을 용이하게 하기 위해 기둥 표면에 케이블 채널을 배치하는 것을 고려해야 합니다. |
알루미늄 프로파일 브래킷 설계
알루미늄 프로파일 브래킷은 이중 기둥 알루미늄 프로파일로 제작되며 유럽 표준 8080 알루미늄 프로파일을 선택해야 하며 구체적인 계획은 다음 그림에 나와 있습니다.
정사각형 튜브 브래킷 설계(권장 방법)
정사각형 튜브 브래킷을 사용할 때는 용접용 국가 표준 중공 사각 튜브를 사용해야 합니다. 속이 빈 정사각형 튜브는 강도와 안정성이 높아 견고한 지지 프레임을 제공합니다. 브래킷의 설계 형태는 실제 상황에 따라 단일 기둥 또는 갠트리 형태로 선택할 수 있습니다. 구체적인 형식과 요구 사항은 다음과 같습니다:
-
단일 기둥 브래킷 설계
주변에 큰 진동이 없는 환경에 적합합니다. 구조가 간단하고 설치가 쉬운 것이 특징입니다.
설계 요구 사항:
-
각강의 사양은 100*100*5 이상이어야 합니다.
-
일체형 용접 몰딩을 권장합니다.
-
카메라 지지 빔과 기둥에는 필요한 대각선 브레이스와 리브가 제공되어야 합니다.
-
-
갠트리 브래킷 설계
진동이 심한 환경에 적합합니다. 갠트리 사양은 외부 진동과 충격에 더 잘 견딜 수 있는 안정적인 지지 구조를 제공하여 카메라의 안정성을 보장합니다.

슬라이딩 카메라 브래킷 설계
인접한 파렛트에 같은 카메라가 사용되는 시나리오에 적합합니다.
슬라이딩 카메라 브래킷은 동력 요소에 따라 서보 모듈 마운트와 실린더 마운트로 나눌 수 있습니다.
-
서보 모듈형 브래킷
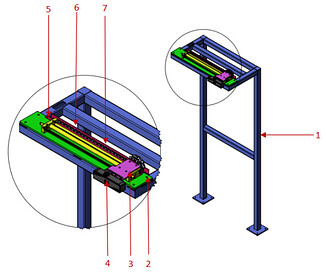
서보 모듈형 브래킷은 충격 없이 부드럽게 주행, 정지 및 출발해야 하며, 권장 정상 주행 속도는 250mm/s 이하입니다. 서보 모듈 타입의 구성은 1-브래킷 본체, 2-모듈 마운팅 플레이트, 3-카메라 마운팅 플레이트, 4-카메라, 5-서보 모듈, 6-드래그 체인 마운팅 플레이트, 7-드래그 체인으로 이루어져 있으며, 다음 그림과 같습니다.
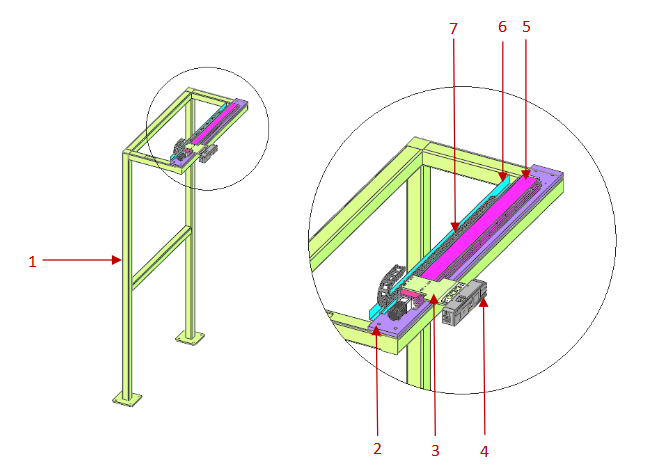
브래킷 본체: 100*100 각강으로 용접합니다. 브래킷이 전체적으로 높은 시나리오에는 대각가새 또는 기타 고정 장치를 추가할 수 있습니다. 모듈 마운팅 플레이트 및 카메라 마운팅 플레이트: 서보 모듈이 작동 중일 때 카메라의 안정성을 보장할 수 있는 충분한 강도와 강성을 갖춥니다. 서보 모듈: 프로젝트 정확도의 실제 요구에 따라 선형 서보 모듈의 적절한 정확도, 서보 모터 권장 사용의 구동 부분을 선택하기 위해 서보 모듈 반복 위치 정확도는 ± 0.01mm, ± 0.02mm, ± 0.05mm, ± 0.1mm, ± 0.2mm 등으로 나눌 수 있습니다. 드래그 체인: 표준 시장 구매의 총 케이블 직경 선택에 따른 드래그 체인은 일반적으로 드래그 체인 내부 부피의 60% ~ 80% 미만의 단면적에서 차지하는 총 케이블이 필요합니다. 드래그 체인 마운팅 플레이트: 요구 사항에 따라 판금 절곡을 사용합니다.
-
실린더 마운트(권장하지 않는 옵션)
실린더의 위치 정확도는 서보 모듈의 정확도보다 약간 낮아야 하며, 일반적으로 정확도는 ±0.1mm에 달할 수 있습니다. 실린더형 브래킷은 원활하게 작동하고 충격 없이 정지 및 시작해야 하고 정상 작동 속도는 ≤200mm/s를 권장합니다. 실린더형 브래킷은 아래와 같이 1-브래킷 본체, 2-실린더 마운팅 플레이트, 3-카메라 마운팅 플레이트, 4-카메라, 5-실린더, 6-드래그 체인 마운팅 플레이트, 7-드래그 체인으로 구성됩니다.
실린더: 실제 현장 적재 거리에 따라 실린더 스트로크를 선택합니다. 실린더 유형에 맞는 가이드로드 실린더를 선택하는 것이 좋으며, 그렇지 않으면 선형 가이드와 함께 사용해야 합니다. 또한 실린더는 유압 버퍼 + 리미트 블록과 함께 사용해야 하며, 실린더에는 배기 스로틀이 장착되어 있어야 합니다. 브라켓 본체, 실린더 마운팅 플레이트, 카메라 마운팅 플레이트, 드래그 체인 마운팅 플레이트 및 드래그 체인의 설계 및 선택은 서보 모듈형 브라켓을 참조할 수 있습니다.
이 방법은 실린더 충격, 전반적인 작동 정확도, 주차 위치에서의 카메라 진동 및 장기적인 안정성을 고려할 때 권장되지 않습니다.
수직 모바일 카메라 브라켓 설계
적용 범위: 더 높은 파렛트 패턴 또는 길이와 너비 치수가 과도한 파렛트 패턴, 하단의 포대 포인트 클라우드가 불량한 파렛트 패턴.
수직 카메라 브라켓은 구동력에 따라 공압식 수직 모바일 카메라 브라켓과 전동식 수직 모바일 카메라 브라켓으로 나뉩니다.
-
전동식 수직 모바일 카메라 브라켓
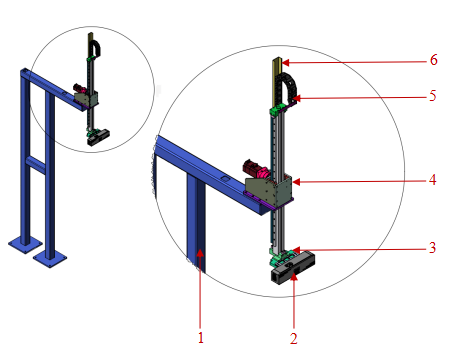
설계 요구 사항: 카메라 브래킷이 원활하게 작동하고 작업에 격렬한 충격이 없으며 이동 속도가 250mm/s 미만이고 이동 메커니즘이 부드럽고 매끄럽게 작동해야 합니다. 또한 카메라 브래킷은 작동 중 진동이 발생하지 않도록 충분한 강성이 있어야 합니다. 전동식 수직 모바일 카메라 브래킷은 다음 그림과 같이 1-브래킷 본체, 2-3D 카메라, 3-카메라 마운팅 플레이트, 4-랙 및 피니언 어셈블리, 5-드래그 체인, 6-탱크 체인 마운팅 플레이트로 구성됩니다.
랙 및 피니언 어셈블리: 우발적인 정전 후 카메라가 자유 낙하하는 것을 방지하기 위해 홀딩 브레이크 타입의 모터를 선택하는 것이 좋습니다.
-
공압식 수직 모바일 카메라 브라켓(권장하지 않는 옵션)
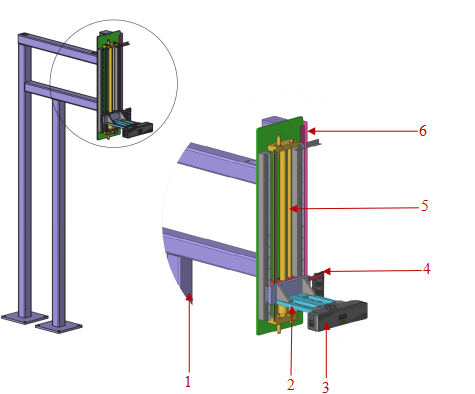
설계 요구 사항: 카메라 브래킷이 원활하게 작동하고 작업에 격렬한 충격이 없으며 이동 속도가 200mm/s 미만이고 이동 메커니즘이 부드럽고 원활하게 작동하며 카메라 브래킷은 작업 과정에서 진동이 발생하지 않도록 충분한 강성을 가져야 합니다. 공압식 수직 모바일 카메라 브래킷은 다음 그림과 같이 1-브래킷 본체, 2-카메라 마운팅 플레이트, 3-3D 카메라, 4-드래그 체인, 5-로드리스 실린더, 6-드래그 체인 마운팅 플레이트로 구성됩니다.
실린더: 실제 현장 적재 거리에 따라 실린더 스트로크를 선택합니다. 또한 실린더에는 오일 압력 스너버와 리미트 블록이 장착되어 있어야 하며 배기 공기 스로틀이 장착되어 있어야 합니다. 공기 차단 후 중력으로 인해 카메라가 자유 낙하하지 않도록 중앙 씰 컨트롤 실린더 반전 밸브를 선택합니다.
이 방법은 실린더 충격, 전반적인 작동 정확도, 주차 위치에서의 카메라 진동 및 장기적인 안정성을 고려할 때 권장되지 않습니다.
Eye in Hand - 마운팅 브래킷의 설계 및 설치
두 가지 일반적인 디자인의 Eye in Hand 마운팅 브래킷은 아래에 설명되어 있습니다.
카메라는 로봇의 J6 축 플랜지 위에 있음
-
장점: 로봇의 팔 길이가 짧아 카메라를 들어 올려 시야를 넓혀 이미지를 캡처할 수 있습니다.
-
단점: 로봇의 J6 축 회전 범위가 제한되고 카메라 마운트 또는 카메라와 로봇 본체 간의 간섭이 발생할 수 있습니다.
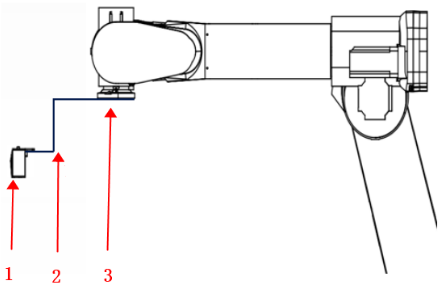
구조 그림: 1-카메라, 2-카메라 브래킷, 3-로봇 J6축 플랜지
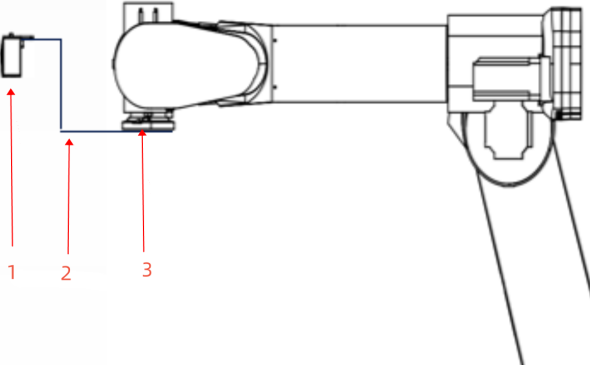
카메라는 로봇의 J6 축 플랜지 아래에 있음
-
장점: 로봇 J6 축 회전은 카메라 또는 카메라 마운트의 영향을 받지 않습니다.
-
단점: 로봇을 같은 높이로 들어 올리면 카메라의 이미지 캡처 높이가 낮아지고 시야각이 좁아집니다.
구조 그림: 1-카메라, 2-카메라 브래킷, 3-로봇 J6축 플랜지