포인트를 필터링하기

파라미터 설명
포인트 필터 유형
설명: 포인트 클라우드 중의 포인트를 필터링하는 방법은 2가지 있는데 실제 수요에 따라 선택하십시오.
-
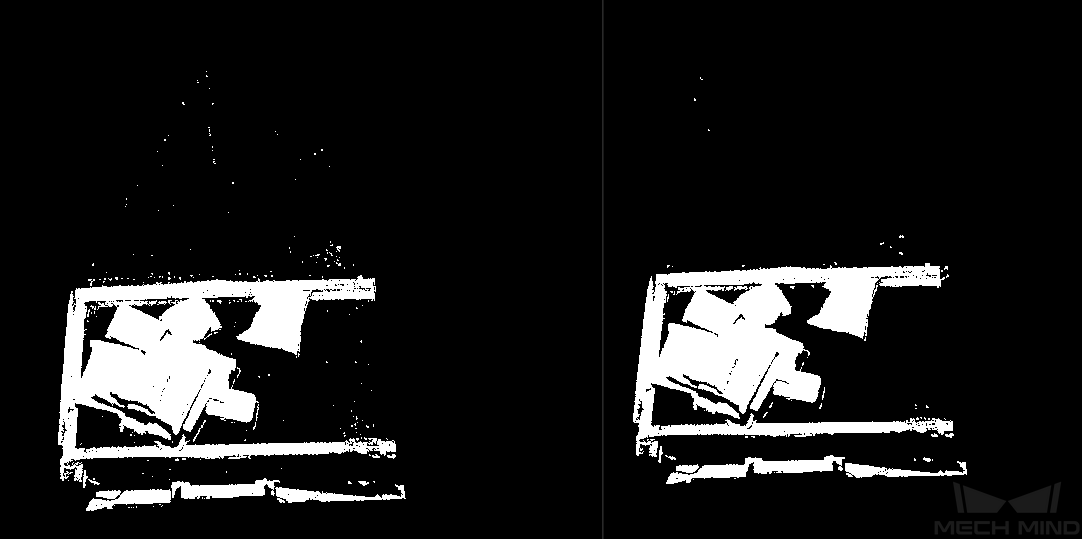
StatisticalOutlierFilter: 통계 필터는 주어진 파라미터에 따라 지정된 범위를 넘은 포인트를 제거합니다. 아래 그림과 같이 포인트 클라우드에 뚜렷한 이상치가 있을 때 사용하는 것이 좋습니다.
-
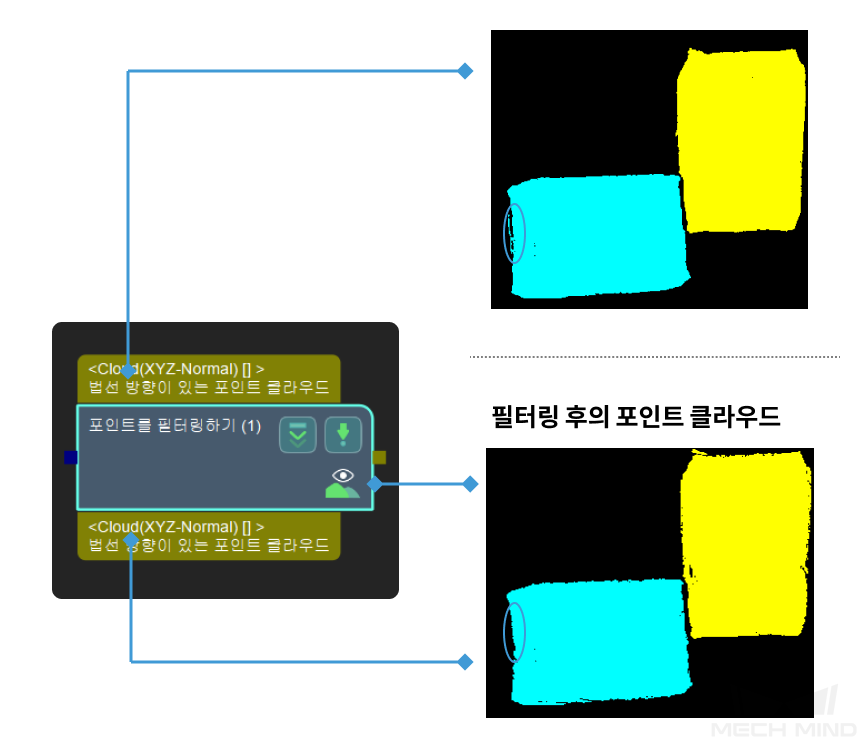
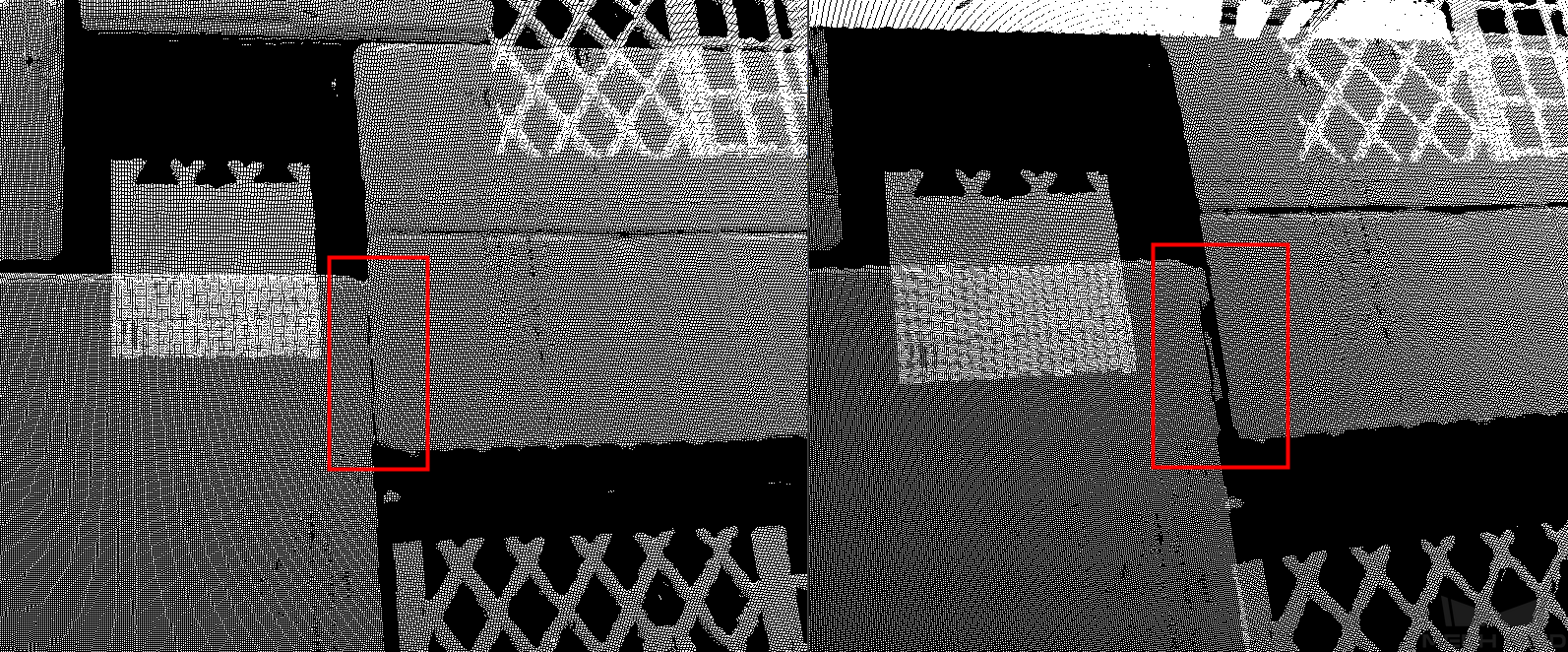
NormalsFilter: 법선 방향 필터는 주어진 기준 방향을 통해 포인트 클라우드의 각 포인트와 기준 방향 사이의 각도를 계산하고 지정된 범위를 넘은 포인트를 필터링합니다. 아래 그림의 빨간 박스와 같이 점착을 피하기 위해 포인트 클라우드를 레이어링해야 할 때 사용하는 것이 좋습니다.
StatisticalOutlierFilter
- 가장 가까운 포인트의 수
-
기본값: 30
조절 설명: 이 파라미터는 각 검색에 대한 가장 가까운 포인트의 수를 제어하는 데 사용됩니다. 이 파라미터가 클수록 평균 거리 값을 계산하는 데 사용되는 이웃 포인트의 수가 많아지고 적용 범위가 넓어집니다.
- 거리 역치 표준 편차 승수
-
기본값: 2
조절 설명: 이 파라미터는 역치 기준에서 표준 편차의 승수 크기를 제어하는 데 사용됩니다. 이 파라미터가 작을수록 역치가 낮아지고 더 적은 포인트가 유지됩니다. 그러나 포인트 수가 너무 적고 가져오는 정보가 줄어듭니다.
NormalsFilter
Reference Direction
- 로봇 Z축을 사용하기
-
기본값: 선택하지 않음.
조절 설명: 이 파라미터는 카메라 좌표에 로봇의 Z축을 기준 방향으로 사용할지를 결정합니다. 이 옵션을 선택되면 기준 방향 X/Y/Z 값 이 모두 무효로 됩니다.
- 기준 방향 X 값
-
기본값: 0
조절 설명: 이 파라미터는 법선 방향 필터링을 위한 기준 축을 설정하는 데 사용됩니다. 이것은 3개의 파라미터로 설정되며, 3개의 파라미터 X, Y 및 Z는 기준 축의 방향을 설정하는 데 사용되는 벡터를 형성합니다. 카메라 좌표에 로봇 Z축을 사용하기 옵션을 선택하는 경우 위의 3개의 파라미터가 무효로 되고 기준 축을 로봇 Z축으로 설정됩니다.
- 기준 방향 Y 값
-
기본값: 0
조절 설명: 기준 방향 X값과 같습니다.
- 기준 방향 Z 값
-
기본값: -1
조절 설명: 기준 방향 X값과 같습니다.
Angle Thresholding Settings
- 최소 각도 차이
-
기본값: 0
조절 설명: 이 파라미터는 포인트를 필터링하는 과정에서 각도 차이의 하한을 제어하는 데 사용되며 단위는 °입니다. 법선 벡터와 참조 벡터 간의 각도 차이가 이 역치보다 낮으면 포인트가 필터링됩니다.
- 최대 각도 차이
-
기본값: 90
조절 설명: 이 파라미터는 포인트를 필터링하는 과정에서 각도 차이의 상한을 제어하는 데 사용되며 단위는 °입니다. 법선 벡터와 참조 벡터 간의 각도 차이가 이 역치보다 높으면 포인트가 필터링됩니다.