포즈 변환(갠트리)
응용 시나리오
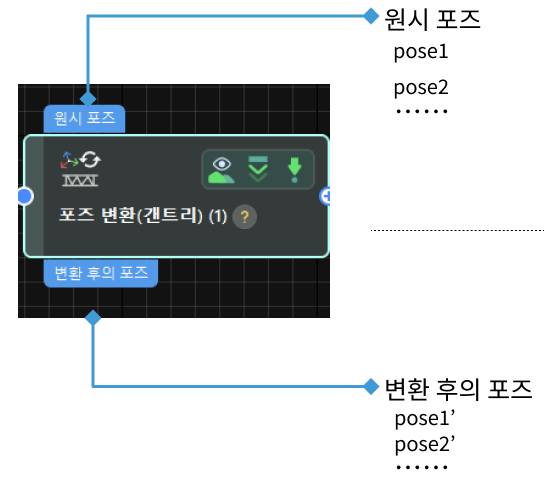
이 스텝은 갠트리 로봇 엔지니어링의 포즈 좌표계 변환에 사용됩니다.
|
프로젝트에서 갠트리 로봇을 사용하지 않은 경우, 포즈 변환 스텝을 선택해야 합니다. 스텝을 잘못 선택하면 잘못된 전환 포즈가 발생하고 잘못된 픽 포인트가 출력될 수 있습니다. |
이 스텝은 갠트리 로봇 엔지니어링의 포즈 좌표계 변환에 사용됩니다.
|
프로젝트에서 갠트리 로봇을 사용하지 않은 경우, 포즈 변환 스텝을 선택해야 합니다. 스텝을 잘못 선택하면 잘못된 전환 포즈가 발생하고 잘못된 픽 포인트가 출력될 수 있습니다. |