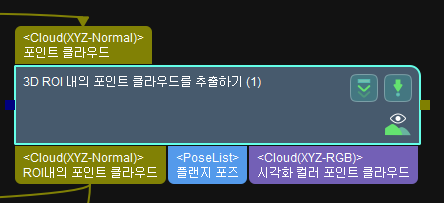
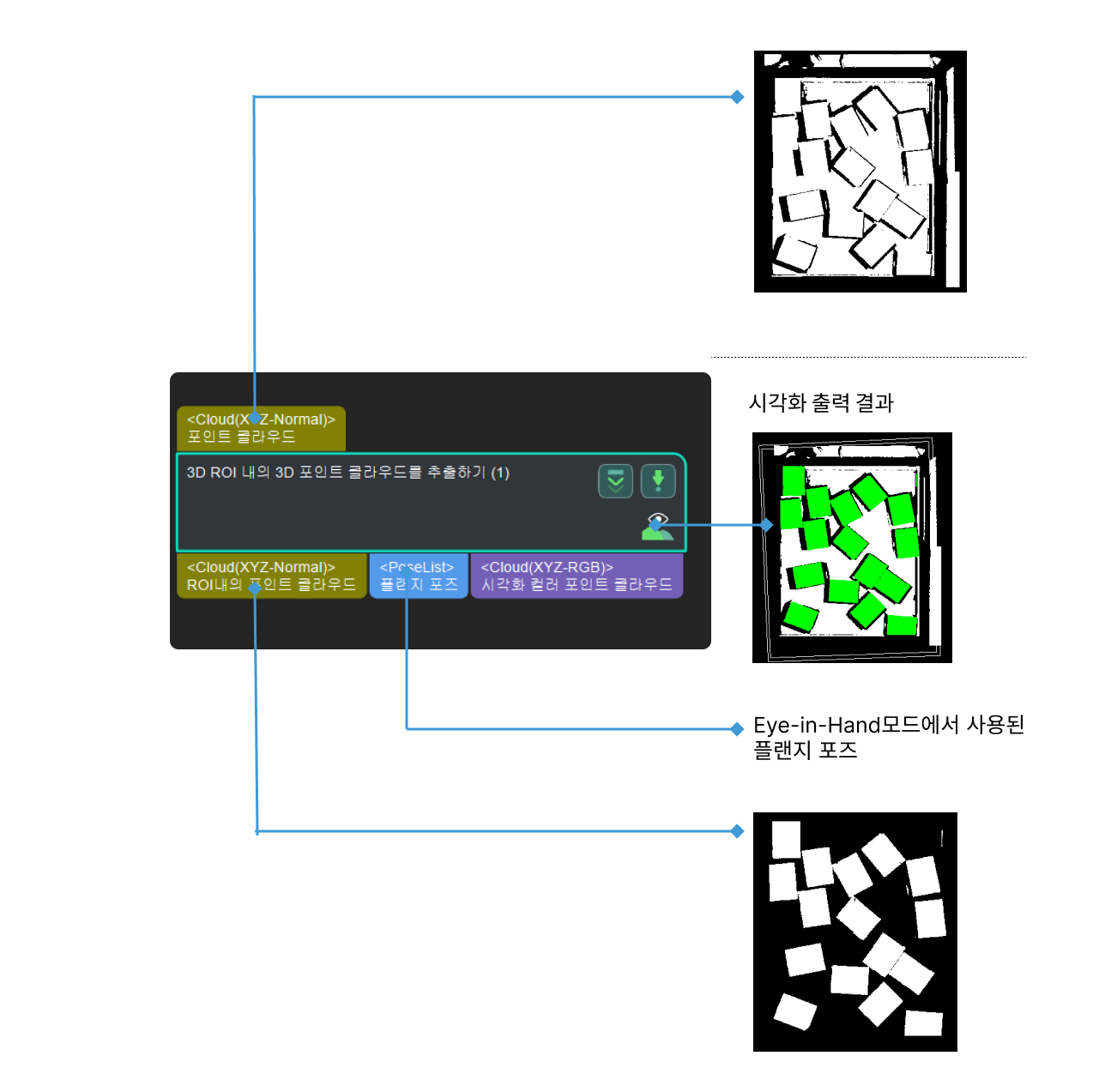
3D ROI 내의 포인트 클라우드를 추출하기
파라미터 설명
3D ROI 설정
- 3D ROI
-
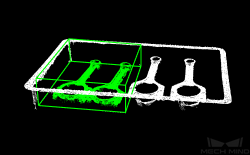
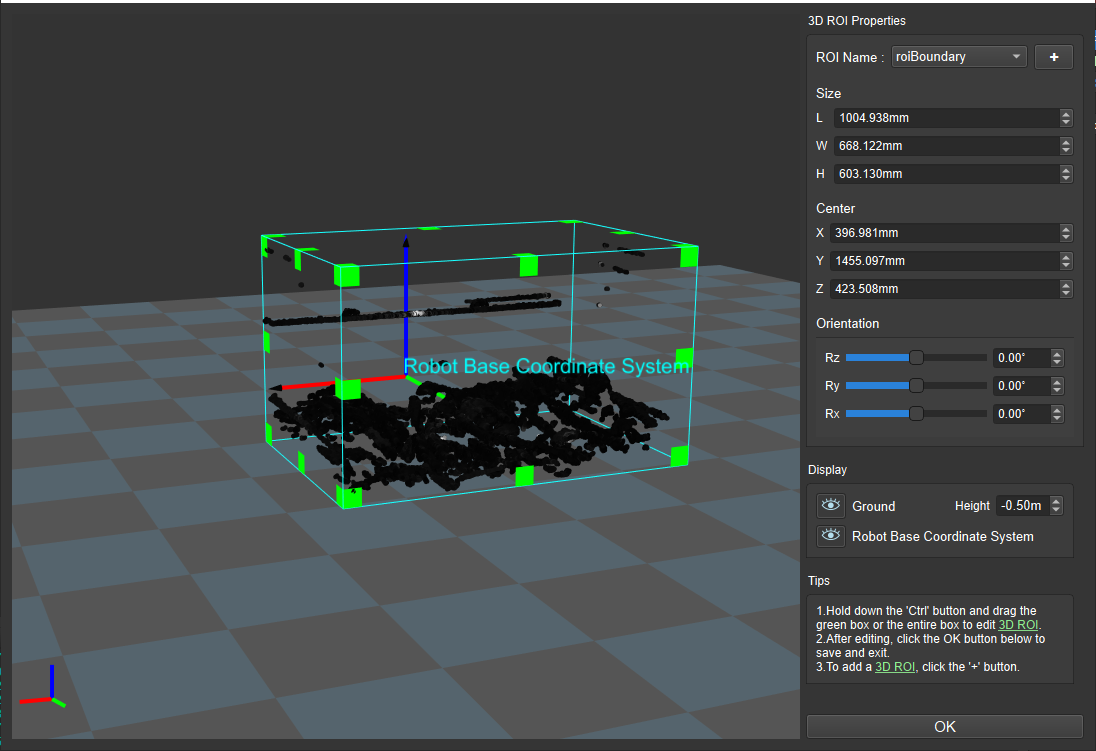
조정 설명: 3D 관심 영역(ROI) 설정을 클릭하여 아래 그림과 같이 대상 영역 설정 창으로 들어갑니다. 자세한 설정은 3D ROI 설정 프로세스를 참고하십시오.
입력된 포인트 클라우드 좌표계의 유형
기본값: 카메라 좌표계
값 리스트: 카메라 좌표계, 로봇 좌표계
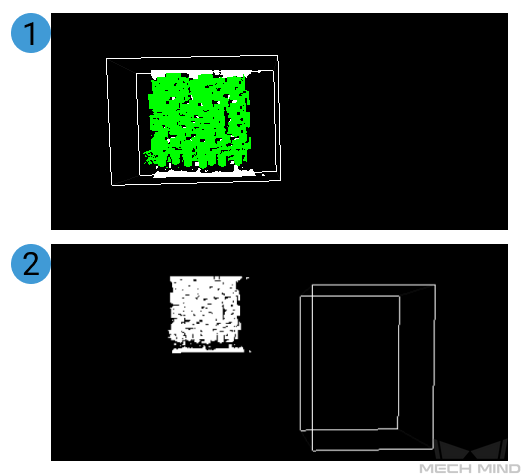
조정 설명: 입력된 포인트 클라우드가 있는 좌표계를 변경합니다. 아래 그림과 같이 그림 1은 카메라 좌표계에서 입력한 포인트 클라우드이며 그림 2는 로봇 좌표계에서 입력한 포인트 클라우드입니다.
빈 상태 설정
- 3D ROI에 있는 최소 포인트 수
-
기본값: 0
조정 설명: 이 파라미터는 3D ROI에서 추출할 수 있는 3D 포인트 수의 최소값을 조정합니다. 3D ROI에서 추출한 3D 포인트의 수가 이 수치보다 작으면 선택한 3D ROI 내의 포인트의 수가 최소 포인트 수를 충족하지 못했음을 나타내며 이때 포인트 클라우드를 반환하지 않습니다.
- 3D ROI에 있는 포인트가 비어 있는지를 전송하기
-
기본값: 선택함
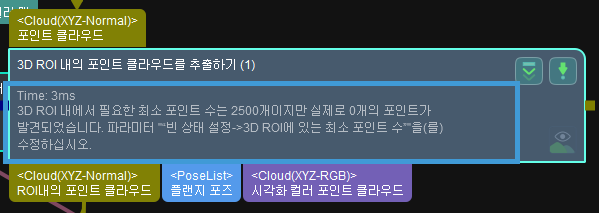
조정 설명: 이 옵션을 선택하면 3D ROI 안에 있는 포인트가 비어 있는지를 전송합니다. 기본적인 상태에서 3D ROI 내의 실제 포인트 수가 “3D ROI 내의 최소 포인트 수”보다 작으면 아래 그림과 같은 알람이 나타날 것입니다.
이 옵션을 선택하지 않으면 알림이 나오지 않습니다. 아래 그림과 같습니다.