모델 좌표계 조정
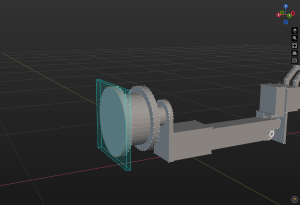
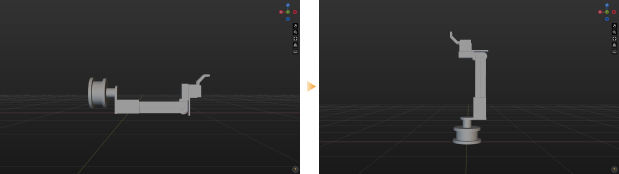
모델 기준 좌표계를 조정하려면 모델이 장착된 좌표계의 원점 위치에서 좌표계를 설정해야 합니다. 설정이 완료되면 모델이 장착된 좌표계의 원점은 모델 편집기 기준 세계 좌표계의 원점과 일치해야 합니다.
기준 좌표계를 설정할 때는 먼저 원점 위치를 결정한 다음 두 축의 방향을 확인합니다. 모델이 장착된 좌표계의 원점은 일반적으로 로봇 말단장치가 장착된 플랜지 중앙에 위치합니다. Z축 방향은 일반적으로 장착 플랜지 평면에 수직이며 바깥쪽을 가리킵니다.
| 우선 선택 도구 사용 설명 내용을 참조하십시오. |
1. “기준 모델” 패널에 모델 이름을 선택합니다.
|
|
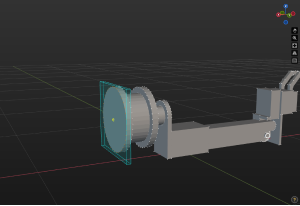
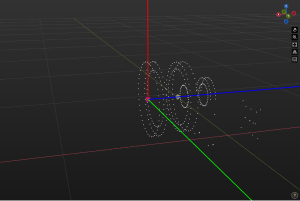
3. 중심점을 생성하기 버튼을 클릭하여 이 점을 좌표계의 원점으로 사용하십시오.
|
|
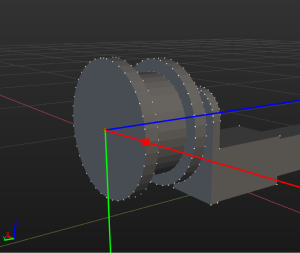
4. 직육면체 선택 도구를 클릭하고 선택 프레임을 조정하며 가장 바깥쪽 꼭짓점에 평행한 꼭짓점을 선택하십시오.
|
|
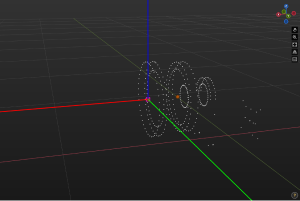
6. 좌표계 설정 버튼을 클릭하십시오.
|
|
10. Z 오른쪽의선택되지 않음 버튼을 클릭하십시오.
|
|
12. 확인 버튼을 클릭하십시오.
|
|