말단장치 자동 전환
프로젝트 소개
이 샘플에서는 어지럽게 쌓여진 소형 판금 부품을 피킹하는 시나리오에서 자동으로 말단장치를 전환하는 방법에 대해 설명하겠습니다. 비전 시스템의 가이드를 통해 로봇은 픽 포인트에 따라 적합한 말단장치로 전화하고 스마트 깊은 빈 피킹 작업을 수행하여 높은 제거율을 유지합니다.
실제 응용 효과는 다음과 같습니다.
응용 시나리오
-
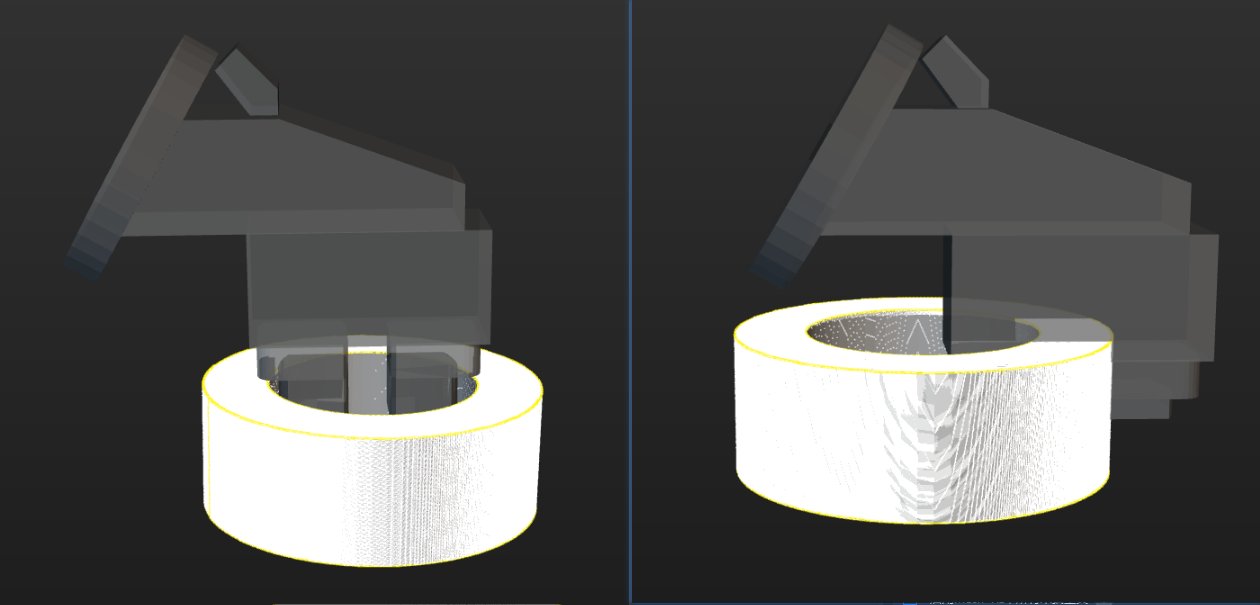
같은 말단장치를 통해 여러 방식으로 대상 물체를 피킹하는 시나리오에 적용됩니다. 예를 들어 링을 피킹할 때 링 내부에서 혹은 외부에서 다른 방식으로 링을 피킹할 수 있습니다.
-
로봇이 툴 스위칭 플랫폼으로 이동하여 현재 사용된 말단장치를 실제로 다른 말단장치로 전화하는 시나리오에 적용되지 않습니다.
| 이 샘플은 같은 말단장치를 통해 여러 방식으로 대상 물체를 피킹한 효과를 보여줍니다. |
사용 전제 조건
-
마스터 컨트롤 통신 방식에서 프로젝트 소스 트리에서 일반 도구에 대한 로직을 구성합니다.
-
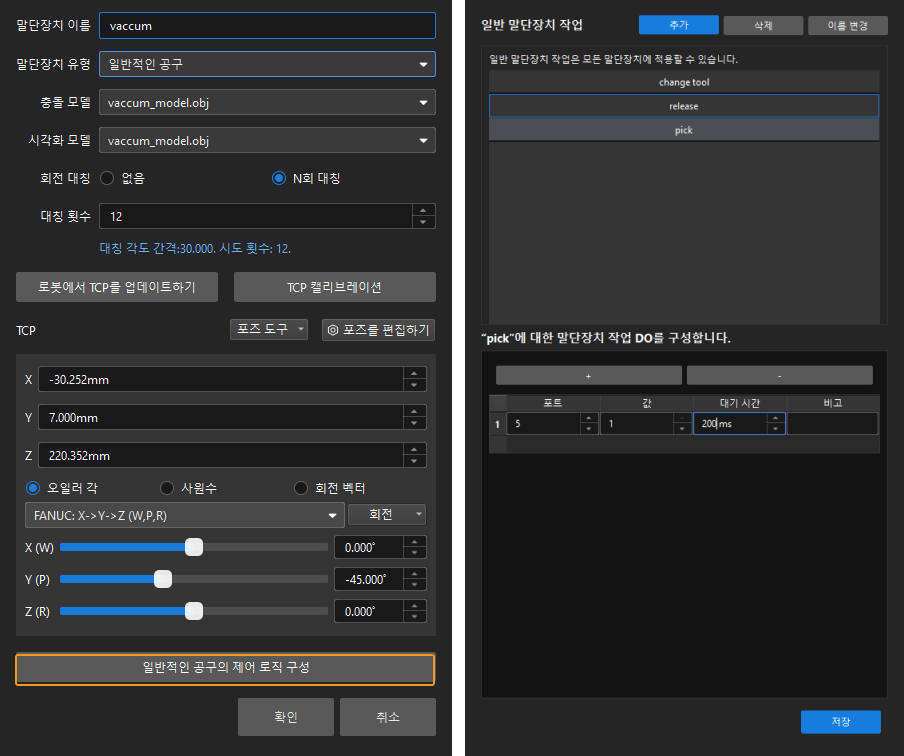
프로젝트 소스 트리의 말단장치 오른쪽에 있는
 를 클릭하여 말단장치 구성 창으로 들어가 말단장치를 추가하고 관련 구성을 설정합니다.
를 클릭하여 말단장치 구성 창으로 들어가 말단장치를 추가하고 관련 구성을 설정합니다. -
창 맨 아래의 일반 말단장치에 대한 제어 로직 구성을 클릭하여 관련 구성 작업을 수행합니다.
-
일반 말단장치 작업 리스트에 모든 말단장치의 공통적인 작업 이름을 추가합니다.
-
다양한 말단장치와 해당되는 말단장치 작업을 위해 독립적으로 DO 신호를 구성합니다.
-
-
-
대상 물체 편집기에서 픽 포인트와 말단장치의 대응 관계를 구성합니다.
말단장치와 픽 포인트의 상대 위치 관계를 미리 보기 위해 픽 포인트을 설정하는 단계에서 말단장치 리스트에서 필요한 말단장치를 작동시킬 수 있습니다. 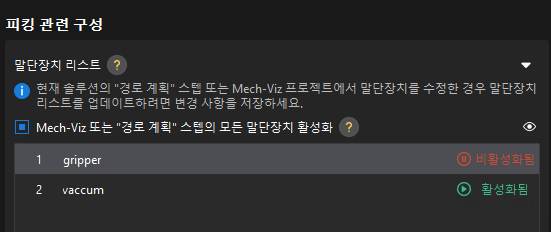
-
표준 인터페이스 프로그램이나 Adapter를 통해 통신하려면 로봇의 프로그램을 작성해야 합니다. 이 샘플 프로젝트는 샘플 프로그램을 제공합니다. 소프트웨어의 설치 디렉터리
통신 구성 요소/Robot_Interface/FANUC/sample/MM_S7_Viz_SwitchTCP에 가서 다운받을 수 있습니다. 더 많은 샘플 플로그램의 정보를 알고 싶은다면 샘플 프로그램(영어 버전)을 참조하십시오.
작업 흐름 설명
-
아래 그림은 표준 인터페이스와 Adapter 통신 방식에서 작업 흐름에서 말단장치를 바꾸기 스텝의 위치를 보여줍니다.

-
마스터 컨트롤 통신 방식의 작업 흐름은 아래 그림과 같습니다. 표준 인터페이스와 Adapter 통신 방식의 작업 흐름에 비해 말단장치 작업을 수행할 수 있는 말단장치 작업 수행 스텝은 추가됩니다.

작업 흐름에서의 핵심 스텝과 스텝의 기능은 아래 표와 같습니다.
번호 스텝 기능 1
적합한 말단장치로 자동으로 전환됩니다.
2
말단장치를 초기 피킹 상태로 조정합니다.
3
말단장치를 사용하여 피킹 명령어를 수행합니다.
4
말단장치를 사용하여 배치 명령어를 수행합니다.
파라미터 조정 설명
-
말단장치를 전환하기 스텝
스텝 파라미터 구역에서 작업 모드를 적합한 말단장치로 자동으로 전환되기로 설정하고 수요애 따라 사용되는 말단장치를 제한하기를 선택합니다. 선택되지 않은 경우 대상 물체 편집기에서 이미 사용된 말단장치를 적합한 말단장치로 전화해 봅니다.

-
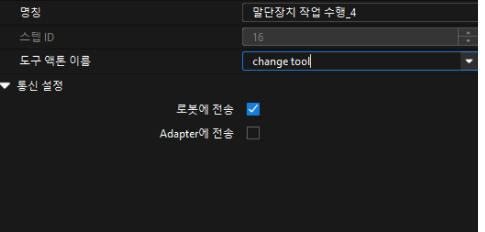
말단장치 작업 수행 스텝
이 스텝은 마스터 컨트롤 통신 방식에서만 사용될 수 있습니다. 말단장치 작업 드롭다운 메뉴에서 해당 단계에서 수행해야 할 말단장치 작업을 선택합니다. 마스터 컨트롤 통신 방식에서 로봇으로 보내기를 선택합니다.
사용 시 주의사항
이 샘플 예시를 실제로 적용하려면 다음 주의사항에 따라 프로젝트를 수정하고 구성하면 빠르게 프로젝트를 사용할 수 있습니다.
-
비전 기록을 닫고 비전 인식 스텝을 통해 해당되는 Mech-Vision 프로젝트를 사용하여 비전 결과를 얻습니다.
-
충돌 감지 기능 패널에서 파라미터를 구성합니다.
-
표준 인터페이스 통신을 사용하려면 샘플 프로그램(영어 버전)에 따라 로봇의 프로그램을 작성합니다.